
Теория ПДД. 13.Проезд перекрестков.
13.1. При повороте направо или налево водитель обязан уступить дорогу пешеходам и велосипедистам, пересекающим проезжую часть дороги, на которую он поворачивает.
13.2.Запрещается выезжать на перекресток, пересечение проезжих частей или участка перекрестка, обозначенного разметкой 1.26 , если впереди по пути следования образовался затор, который вынудит водителя остановиться, создав препятствие для движения транспортных средств в поперечном направлении, за исключением поворота направо или налево в случаях, установленных настоящими Правилами.
13.3. Перекресток, где очередность движения определяется сигналами светофора или регулировщика, считается регулируемым.
При желтом мигающем сигнале, неработающих светофорах или отсутствии регулировщика перекресток считается нерегулируемым, и водители обязаны руководствоваться правилами проезда нерегулируемых перекрестков и установленными на перекрестке знаками приоритета.
Регулируемые перекрестки
13.4. При повороте налево или развороте по зеленому сигналу светофора водитель безрельсового транспортного средства обязан уступить дорогу транспортным средствам, движущимся со встречного направления прямо или направо. Таким же правилом должны руководствоваться между собой водители трамваев.
13.5. При движении в направлении стрелки, включенной в дополнительной секции одновременно с желтым или красным сигналом светофора, водитель обязан уступить дорогу транспортным средствам, движущимся с других направлений.
13.6. Если сигналы светофора или регулировщика разрешают движение одновременно трамваю и безрельсовым транспортным средствам, то трамвай имеет преимущество независимо от направления его движения. Однако при движении в направлении стрелки, включенной в дополнительной секции одновременно с красным или желтым сигналом светофора, трамвай должен уступить дорогу транспортным средствам, движущимся с других направлений.
13.7. Водитель, въехавший на перекресток при разрешающем сигнале светофора, должен выехать в намеченном направлении независимо от сигналов светофора на выходе с перекрестка. Однако, если на перекрестке перед светофорами, расположенными на пути следования водителя, имеются стоп-линии (знаки 6.16 ), водитель обязан руководствоваться сигналами каждого светофора.
13.8. При включении разрешающего сигнала светофора водитель обязан уступить дорогу транспортным средствам, завершающим движение через перекресток, и пешеходам, не закончившим переход проезжей части данного направления.
Нерегулируемые перекрестки
13.9. На перекрестке неравнозначных дорог водитель транспортного средства, движущегося по второстепенной дороге, должен уступить дорогу транспортным средствам, приближающимся по главной, независимо от направления их дальнейшего движения.
На таких перекрестках трамвай имеет преимущество перед безрельсовыми транспортными средствами, движущимися в попутном или встречном направлении по равнозначной дороге, независимо от направления его движения.
13.10. В случае, когда главная дорога на перекрестке меняет направление, водители, движущиеся по главной дороге, должны руководствоваться между собой правилами проезда перекрестков равнозначных дорог. Этими же правилами должны руководствоваться водители, движущиеся по второстепенным дорогам.
13.11. На перекрестке равнозначных дорог, за исключением случая предусмотренного пунктом 13.11.1 Правил, водитель безрельсового транспортного средства обязан уступить дорогу транспортным средствам, приближающимся справа. Этим же правилом должны руководствоваться между собой водители трамваев.На таких перекрестках трамвай имеет преимущество перед безрельсовыми транспортными средствами независимо от направления его движения.
13.11.1 При въезде на перекресток, на котором организовано круговое движение и который обозначен знаком 4.3 , водитель транспортного средства обязан уступить дорогу транспортным средствам, движущимся по такому перекрестку.
13.
 12. При повороте налево или развороте водитель безрельсового транспортного средства обязан уступить дорогу транспортным средствам, движущимся по равнозначной дороге со встречного направления прямо или направо. Этим же правилом должны руководствоваться между собой водители трамваев.
12. При повороте налево или развороте водитель безрельсового транспортного средства обязан уступить дорогу транспортным средствам, движущимся по равнозначной дороге со встречного направления прямо или направо. Этим же правилом должны руководствоваться между собой водители трамваев.13.13. Если водитель не может определить наличие покрытия на дороге (темное время суток, грязь, снег и тому подобное), а знаков приоритета нет, он должен считать, что находится на второстепенной дороге.
На этом сайте вы сможете подготовиться к экзамену в ГИБДД (ГАИ) по новым правилам 2021 года. Здесь есть все необходимое для успешной сдачи экзамена. Все 40 официальных экзаменационных билетов ПДД РФ на категории АБМ (ABM) и СД (CD) с последними изменениями от 02 января 2020 года. Билеты полностью актуальны на ноябрь 2021 года и полностью соответствуют билетам ГИБДД. Билеты содержат комментарии с изображениями дорожных знаков и разметки и ссылок на актуальные пункты правил дорожного движения с последними изменениями на 2021 год.
Проезд перекрестков на велосипеде — Саратов Велосипедный
Велосипедисты подчиняются тем же правилам дорожного движения, что и другие участники дорожного движения. Это мы уже выучили. В этой статье пойдет речь о проезде перекрестков, как регулируемых, так и не регулируемых.
Для начала напомним, что для велосипедистов на перекрёстках действуют обычные правила приоритета (п. 13 и др. правил дорожного движения). Так, автомобиль, двигающийся по второстепенной дороге, должен уступить велосипеду, двигающемуся по главной (пп. 13.9—13.10 правил дорожного движения).
Проезд нерегулируемых перекрестков
Нерегулируемый перекресток – это тот, на котором отсутствует светофор или регулировщик, или тот, на котором на светофоре мигает желтый свет.
На нерегулируемом перекрестке равнозначных дорог преимущество имеет безрельсовое транспортное средство, у которого нет помехи справа (п. 13.11 правил дорожного движения), то есть на таком перекрестке приближающийся слева автомобиль должен уступить дорогу велосипедисту.
Но на нерегулируемом пересечении велосипедной дорожки с дорогой, расположенном вне перекрёстка, водители велосипедов должны уступить дорогу всем транспортным средствам, движущимся по этой дороге (п. 24.4 правил дорожного движения).
Проезд регулируемых перекрестков
На регулируемых перекрёстках велосипедисты должны подчиняться сигналам специальных велосипедных светофоров (п. 6.5 правил дорожного движения), а при их отсутствии — сигналам обычных транспортных светофоров (не пешеходных).
Автомобиль, поворачивающий направо, должен пропустить велосипедиста, двигающегося рядом с ним по той же дороге прямо (при наличии велосипедной дорожки — согласно п. 13.1 правил дорожного движения, а при её отсутствии — согласно пп. 8.4—8.5 и 8.9 правил дорожного движения).
13.1 правил дорожного движения, а при её отсутствии — согласно пп. 8.4—8.5 и 8.9 правил дорожного движения).
Велосипедист, доехав до конца «Т» образного перекрестка может повернуть налево (подобно проезду обычного перекрестка), не создавая помех другим транспортным средствам.
Левый поворот
Особую опасность для велосипедистов представляет левый поворот, поэтому давайте остановимся на проезде таких перекрестков подробнее.
Поскольку левый поворот при многополосном движении и движении по дорогам с трамвайными путями велосипедисту запрещен, в том числе и на перекрестках (п. 24.3 правил дорожного движения), поэтому для осуществления левого поворота на таких дорогах нужно:
проехать перекресток прямо, развернуться (на 90° налево) в правом ряду пересекаемой дороги, и по разрешающему сигналу светофора вновь проехать перекресток прямо
или
слезть с велосипеда и перейти дорогу по пешеходному переходу
В заключении необходимо сказать, что и сам велосипедист должен отвечать за свои действия, поэтому при поворотах следует учитывать также п. 8.6 правил велосипедного движения: «Поворот должен осуществляться таким образом, чтобы при выезде с пересечения проезжих частей транспортное средство не оказалось на стороне встречного движения. При повороте направо транспортное средство должно двигаться по возможности ближе к правому краю проезжей части»
8.6 правил велосипедного движения: «Поворот должен осуществляться таким образом, чтобы при выезде с пересечения проезжих частей транспортное средство не оказалось на стороне встречного движения. При повороте направо транспортное средство должно двигаться по возможности ближе к правому краю проезжей части»
Целиком правила велосипедного движения можно прочитать на нашем сайте, перейдя по следующей ссылке — Правила Велосипедного Движения. Эти правила можно так же скачать в формате PDF — скачать Правила Велосипедного Движения.
При оформлении статьи использовались фотографии из следующих источников: vonshnauzer.livejournal.com
Уже на 20 перекрёстках установлены новые комплексы фиксации нарушений ПДД
На 20 перекрёстках из 40 запланированных уже смонтированы новые комплексы фиксации нарушений ПДД. Установка оборудования ведётся в рамках реализации масштабного проекта по развитию городской системы фиксации нарушений ПДД.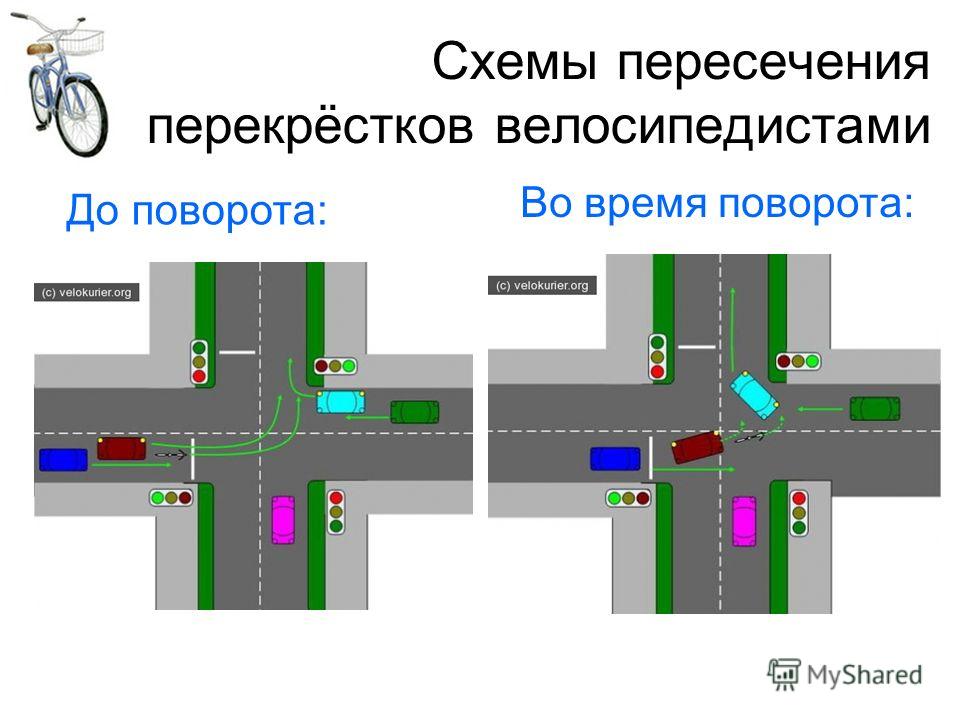
Сейчас реализуется второй этап проекта, в результате которого на 40 аварийно-опасных перекрёстках заработают комплексы, фиксирующие различные нарушения правил проезда перекрёстка: проезд на запрещающий сигнал светофора, пересечение стоп-линии, нарушение правил перестроения, поворот из второй полосы, превышение скорости и др. В зависимости от сложности перекрёстка, различается и количество камер на нём – от 10 до 24. Новые комплексы монтируются в Кировском, Московском, Фрунзенском, Невском, Калининском, Колпинском и других районах города. После тестирования комплексы заработают в постоянном режиме, поэтому просим водителей быть внимательнее и не нарушать.
Новое оборудование устанавливается в местах концентрации дорожно-транспортных происшествий. Проект реализуется совместно с Управлением ГИБДД ГУ МВД России по г. Санкт‑Петербургу и Ленинградской области. Вся информация о нарушениях ПДД и проезжающем автотранспорте передается с комплексов фотовидеофиксации в ЦАФАП УГИБДД. Постановления по делам об административных правонарушениях выносятся инспекторами ЦАФАП после рассмотрения полученных с комплексов материалов.
Вся информация о нарушениях ПДД и проезжающем автотранспорте передается с комплексов фотовидеофиксации в ЦАФАП УГИБДД. Постановления по делам об административных правонарушениях выносятся инспекторами ЦАФАП после рассмотрения полученных с комплексов материалов.
Анализ работы новых комплексов контроля скорости за июнь-июль показал, что водители становятся внимательнее и аккуратнее. Например, новый комплекс на Вознесенском шоссе в июле зафиксировал на 35% нарушений меньше, чем в июне (в июле – 11 тысяч, в июне – 17 тысяч). А комплекс в Колпино по ул. Танкистов – снижение более чем на 20% (2,6 тысячи зафиксированных превышений скорости в июле вместо 3,4 тысяч в июне). Это значит, что со своей «профилактической» задачей комплексы отлично справляются. Значит, наши дороги становятся безопаснее и для автомобилистов, и для пешеходов.
Напоминаем, что адреса работы всех городских комплексов фиксации нарушений ПДД публикуются в открытом доступе на сайте Городского мониторингового центра http://spb112. ru/ и на сайте ГИБДД РФ https://гибдд.рф/.
ru/ и на сайте ГИБДД РФ https://гибдд.рф/.
ПДД РФ раздел 13. Проезд перекрестков
13.1. При повороте направо или налево водитель обязан уступить дорогу пешеходам, переходящим проезжую часть дороги, на которую он поворачивает, а также велосипедистам, пересекающим ее по велосипедной дорожке.
13.2. Запрещается выезжать на перекресток или пересечение проезжих частей, если образовался затор, который вынудит водителя остановиться, создав препятствие для движения транспортных средств в поперечном направлении.
13.3. Перекресток, где очередность движения определяется сигналами светофора или регулировщика, считается регулируемым.
При желтом мигающем сигнале, неработающих светофорах или отсутствии регулировщика перекресток считается нерегулируемым, и водители обязаны руководствоваться правилами проезда нерегулируемых перекрестков и установленными на перекрестке знаками приоритета.
Регулируемые перекрестки
13. 4. При повороте налево или развороте по зеленому сигналу светофора водитель безрельсового транспортного средства обязан уступить дорогу транспортным средствам, движущимся со встречного направления прямо или направо. Таким же правилом должны руководствоваться между собой водители трамваев. (В редакции Постановления Правительства Российской Федерации от 28.03.2012 г. N 254)
4. При повороте налево или развороте по зеленому сигналу светофора водитель безрельсового транспортного средства обязан уступить дорогу транспортным средствам, движущимся со встречного направления прямо или направо. Таким же правилом должны руководствоваться между собой водители трамваев. (В редакции Постановления Правительства Российской Федерации от 28.03.2012 г. N 254)
13.5. При движении в направлении стрелки, включенной в дополнительной секции одновременно с желтым или красным сигналом светофора, водитель обязан уступить дорогу транспортным средствам, движущимся с других направлений.
13.6. Если сигналы светофора или регулировщика разрешают движение одновременно трамваю и безрельсовым транспортным средствам, то трамвай имеет преимущество независимо от направления его движения. Однако при движении в направлении стрелки, включенной в дополнительной секции одновременно с красным или желтым сигналом светофора, трамвай должен уступить дорогу транспортным средствам, движущимся с других направлений.
13.7. Водитель, въехавший на перекресток при разрешающем сигнале светофора, должен выехать в намеченном направлении независимо от сигналов светофора на выходе с перекрестка. Однако, если на перекрестке перед светофорами, расположенными на пути следования водителя, имеются стоп-линии (знаки 6.16), водитель обязан руководствоваться сигналами каждого светофора. (В редакции Постановления Правительства Российской Федерации от 14.12.2005 г. N 767)
13.8. При включении разрешающего сигнала светофора водитель обязан уступить дорогу транспортным средствам, завершающим движение через перекресток, и пешеходам, не закончившим переход проезжей части данного направления.
Нерегулируемые перекрестки
13.9. На перекрестке неравнозначных дорог водитель транспортного средства, движущегося по второстепенной дороге, должен уступить дорогу транспортным средствам, приближающимся по главной, независимо от направления их дальнейшего движения.
На таких перекрестках трамвай имеет преимущество перед безрельсовыми транспортными средствами, движущимися в попутном или встречном направлении по равнозначной дороге, независимо от направления его движения. (Дополнен — Постановление Правительства Российской Федерации от 25.09.2003 г. N 595)
(Дополнен — Постановление Правительства Российской Федерации от 25.09.2003 г. N 595)
В случае если перед перекрестком с круговым движением установлен знак 4.3 в сочетании со знаком 2.4 или 2.5, водитель транспортного средства, находящегося на перекрестке, пользуется преимуществом перед выезжающими на такой перекресток транспортными средствами. (Дополнен — Постановление Правительства Российской Федерации от 10.05.2010 г. N 316)
13.10. В случае, когда главная дорога на перекрестке меняет направление, водители, движущиеся по главной дороге, должны руководствоваться между собой правилами проезда перекрестков равнозначных дорог. Этими же правилами должны руководствоваться водители, движущиеся по второстепенным дорогам.
13.11. На перекрестке равнозначных дорог водитель безрельсового транспортного средства обязан уступить дорогу транспортным средствам, приближающимся справа. Этим же правилом должны руководствоваться между собой водители трамваев.
На таких перекрестках трамвай имеет преимущество перед безрельсовыми транспортными средствами независимо от направления его движения.
13.12. При повороте налево или развороте водитель безрельсового транспортного средства обязан уступить дорогу транспортным средствам, движущимся по равнозначной дороге со встречного направления прямо или направо. Этим же правилом должны руководствоваться между собой водители трамваев.
13.13. Если водитель не может определить наличие покрытия на дороге (темное время суток, грязь, снег и тому подобное), а знаков приоритета нет, он должен считать, что находится на второстепенной дороге.
Другие разделы ПДД России
Раздел 1 ПДД РФ Общие положения Раздел 2 ПДД РФ Общие обязанности водителей Раздел 3 ПДД РФ Применение специальных сигналов Раздел 4 ПДД РФ Обязанности пешеходов Раздел 5 ПДД РФ Обязанности пассажиров Раздел 6 ПДД РФ Сигналы светофора и регулировщика Раздел 7 ПДД РФ Применение аварийной сигнализации и знака аварийной остановки Раздел 8 ПДД РФ Начало движения, маневрирование Раздел 9 ПДД РФ Расположение транспортных средств на проезжей части Раздел 10 ПДД РФ Скорость движения Раздел 11 ПДД РФ Обгон, опережение, встречный разъезд Раздел 12 ПДД РФ Остановка и стоянка Раздел 14 ПДД РФ Пешеходные переходы и места остановок маршрутных транспортных средств Раздел 15 ПДД РФ Движение через железнодорожные пути Раздел 16 ПДД РФ Движение по автомагистралям Раздел 17 ПДД РФ Движение в жилых зонах Раздел 18 ПДД РФ Приоритет маршрутных транспортных средств Раздел 19 ПДД РФ Пользование внешними световыми приборами и звуковыми сигналами Раздел 20 ПДД РФ Буксировка механических транспортных средств Раздел 21 ПДД РФ Учебная езда Раздел 22 ПДД РФ Перевозка людей Раздел 23 ПДД РФ Перевозка грузов Раздел 24 ПДД РФ Дополнительные требования к движению велосипедов, мопедов, гужевых повозок, а также прогону животныхУчебное видео — Проезд регулируемых перекрестков
 youtube.com/embed/eC5kq3yGEPw?rel=0″ allowfullscreen=»» frameborder=»0″/>
youtube.com/embed/eC5kq3yGEPw?rel=0″ allowfullscreen=»» frameborder=»0″/>
Проезд перекрёстков — это один из наиболее сложных моментов в дорожном движении. Перекрестки отличаются друг от друга по конфигурации, и по регулированию. Очередной видеоролик, созданный преподавателями Центральной автошколы Москвы совместно с ГИБДД, продолжает курс учебных видеосюжетов по ПДД 2017.
Сотрудник ГИБДД в сжатой и доступной форме расскажет для учеников автошкол правила проезда регулируемых перекрестков.
Более подробную информацию Вам предоставят преподаватели Центральной автошколы на теоретических занятиях по ПДД, а просмотр видеокурса поможет Вам в автошколе при изучении теоретического курса ПДД, успешно сдать экзамен в ГИБДД и в дальнейшем безопасно проезжать регулируемые перекрестки, не нарушая ПДД.
Проезд перекрёстков
Каждый день водители сталкиваются с проездом перекрёстков. Но, если проезд регулируемых перекрёстков не является особенно сложным, то в других ситуациях возможна суета, неразбериха, и из-за этого – возникновение опасности на дороге.
Для того, чтобы избежать развития подобных ситуаций – достаточно помнить правила проезда перекрёстков.
Все перекрёстки делятся на:
- регулируемые – движение регулируется светофорами, кроме жёлтого мигающего или неработающего, или регулировщиком.
- нерегулируемый перекрёсток равнозначных дорог– движение ТС не управляется с помощью светофора и регулировщика.
- нерегулируемый перекрёсток неравнозначных дорог– подобие тому, что выше, но дороги делятся на главную и второстепенную, они обе обозначены соответствующими знаками приоритета.
По своей «конфигурации» они могут делиться на следующие виды:
- «Т»-образный – одна дорога примыкает слева или справа к другой. Правила проезда «Т»-образного перекрёстка зависят от того, какой он: регулируемый или нерегулируемый.
- Крестообразный перекрёсток – самый распространённый тип, когда одна дорога пересекается с другой.

- Круговой перекрёсток, где несколько дорог соединяются с общим «кольцом». Въезжая на него, автомобиль снижает скорость, движется против часовой стрелки и делает съезд на нужной ему дороге.
- Многосторонние перекрёстки соединяют большое количество дорог между собой и являются местами с интенсивным движением, где следует проявлять большую осторожность.

Общие правила проезда перекрёстков
Всегда уступайте пешеходам, пересекающим дорогу, на которую вы совершаете поворот. Это правило действует независимо от того, регулируемый ли перекрёсток или нерегулируемый.
Запрещается выезжать на перекрёсток, если в намеченном вами направлении образовался затор. Нарушение этого пункта правил приведёт к тому, что вы застрянете в пробке, но и перегородите дорогу другим автомобилям, движущимся через перекрёсток слева или справа. В результате резко возрастает риск конфликта или аварии на дороге.
В равных условиях не забывайте о том, что трамвай имеет преимущество.
Нерегулируемый равнозначный перекрёсток и правила проезда
Проезд перекрёстков равнозначных дорог регулируется правилом «помехи справа». Водитель должен уступать транспортным средствам, приближающимся с правой стороны.
Правила проезда перекрёстков с круговым движением
С 2017 года вступили в силу новые правила проезда кругового движения. Согласно этим изменениям, водители, находящиеся на «круге», имеют приоритет, а въезжающие на «круг» должны уступить дорогу.
Нерегулируемый неравнозначный перекрёсток и правила проезда
Правила проезда нерегулируемого неравнозначного перекрёстка построены на том же правиле «помехи справа». Только сначала разъезжаются те автомобили, которые находятся на главной дороге, затем на второстепенной. Если главная дорога поворачивает, правило остаётся.
При этом неважно, продолжает водитель движение по главной дороге или съезжает с неё.
Этот перекресток поможет избежать пробок на дорогах
Ваш город растет быстрее, чем могут выдержать ваши дороги? Есть ли в вашем городе оживленный перекресток, который огибает кварталы, ожидающие водителей, желающих повернуть налево?
Часто, когда территория растет быстрее, чем может выдержать проезжая часть, перекрестки дублируются, когда водители делают левосторонние повороты, заполняя полосу поворота и выливаясь на проезжую часть. Водители, поворачивающие налево, должны ждать встречного движения.Водители, стоящие в очереди на разворот, должны дождаться ее освобождения, прежде чем проехать перекресток. Это часто происходит вокруг торговых центров или предприятий. В загруженных местах это может привести к длительному резервному копированию и разочарованию водителя.
Водители, поворачивающие налево, должны ждать встречного движения.Водители, стоящие в очереди на разворот, должны дождаться ее освобождения, прежде чем проехать перекресток. Это часто происходит вокруг торговых центров или предприятий. В загруженных местах это может привести к длительному резервному копированию и разочарованию водителя.
В этих ситуациях городам часто необходимо вкладывать средства в обновление развязок, что может быть дорогостоящим и требовать много времени для завершения.
А что, если бы был другой способ?
Пересечение непрерывного потока (CFI), также называемое перекрестно-смещенным левым поворотом (перекресток XDL или DLT), представляет собой конструкцию перекрестка, которая решает эти проблемы с помощью уникальной и эффективной конструкции.Это устраняет заторы, вызванные поворотами налево водителями.
«Идея состоит в том, чтобы водители, поворачивающие налево, начинали свой поворот на перекрестке, контролируемом по сигналу, в нескольких сотнях футов до перекрестка», — говорит Пол Уэллс, проектировщик шоссе SEH. «Это позволяет выполнять левый поворот одновременно со сквозным движением. Люди, желающие продолжить движение, могут оставаться в движении, вместо того, чтобы застревать позади того, кто не может проехать перекресток ».
Материалы по теме: В будущее: что означают беспилотные автомобили для проектирования дорог
При таком типе развязки один сигнал светофора, который обычно чередуется между восемью разными движениями на перекрестке, заменяется тремя сигналами, которые контролируют только два отдельных движения на каждом сигнале.Существует возможность остановиться три раза: один раз по сигналу в середине квартала, когда вы приближаетесь к перекрестку, один раз на перекрестке и один раз по сигналу в середине квартала после выезда с перекрестка. Однако при тщательной координации сигналов движение может продолжаться значительно более эффективно, безопасно и плавно без этих потенциальных остановок.
«Пробки на перекрестке Гавана и Пасха в Centennial растут по двум причинам. Во-первых, прилегающая неосвоенная территория заполняется коммерческими и офисными зданиями, а во-вторых, основная параллельная дорога в окрестностях переполнена, и автомобили меняют свои маршруты через пересечение улиц Гавана и Истер-авеню », — сказал Джон Ларсон, SEH traffic. инженер.«SEH провела исследование дорожного движения и предложила городским властям различные варианты перекрестков».
Centennial в конечном итоге выбрала CFI, чтобы уменьшить заторы и обеспечить бесперебойное движение трафика.
Аэрофотоснимок проекта CFI (выделен красным) на существующем перекрестке в Сентенниал, штат Колорадо.Проект включает преобразование текущего четырехстороннего перекрестка в трехстороннее, что, по словам Ларсона, также сократит заторы в этом районе.
Что теперь происходит?
City of Centennial рассчитывает начать строительство в течение следующих пяти лет, что даст жителям столь необходимое облегчение из-за скопления людей в этом районе.
CFI использует уникальную конструкцию, в которой водители, поворачивающие налево, начинают свой поворот за сотни футов до перекрестка.
«Было здорово участвовать в этом процессе», — говорит Ларсон. «Даже на несколько минут меньше, потраченных в пробке, означает, что можно провести еще больше времени с семьей.”
Об экспертах
Джон Ларсон, ЧП *, PTOE, , инженер-транспортник и семьянин, помогающий городам решать проблемы с заторами на дорогах. Связаться с Джоном
Пол Уэллс, PE *, — старший проектировщик шоссе и поборник решений для проезжей части в Колорадо. Связаться с Полом
* Зарегистрированный профессиональный инженер в CO
Моделирование перекресткас использованием Pygame, часть 1 | by Mihir Gandhi
Эта серия статей содержит пошаговое руководство по разработке симуляции транспортной развязки с нуля с использованием Pygame.
Окончательный результат симуляцииМы разрабатываем симуляцию с нуля с помощью Pygame, чтобы моделировать движение транспортных средств по перекрестку со светофором и таймером. Он содержит 4-полосную транспортную развязку с сигналами светофора, контролирующими движение транспорта в каждом направлении. У каждого сигнала есть таймер наверху, который показывает время, оставшееся до переключения сигнала с зеленого на желтый, с желтого на красный или с красного на зеленый. Транспортные средства, такие как автомобили, мотоциклы, автобусы и грузовики, генерируются, и их движение контролируется в соответствии с сигналами и транспортными средствами вокруг них.Это моделирование можно в дальнейшем использовать для анализа данных или для визуализации приложений AI или ML. На видео ниже показан окончательный результат симуляции, которую мы будем строить.
Прежде чем погрузиться в кодирование и увидеть, как наша прекрасная симуляция оживает, давайте получим несколько изображений, которые нам понадобятся для построения симуляции. Вот список того, что нам нужно:
crossction.png- Светофоры: красный, желтый и зеленый
Убедитесь, что вы переименовали загружаемые изображения в соответствии с подписью к изображениям выше. Затем нам нужно изменить размер изображений светофоров и транспортных средств в соответствии с размером изображения перекрестка с четырьмя путями. Это единственный шаг, который потребует некоторых проб и ошибок, но поскольку мы строим симуляцию с нуля, это необходимо.
Откройте изображение четырехстороннего перекрестка в приложении, например Paint для Windows или Preview для Mac.Выберите область, равную тому, как вы хотите, чтобы машина выглядела в финальной симуляции. Запишите размеры.
Получение размера и координат транспортного средства из изображения перекресткаТеперь измените размер транспортных средств до этого размера, открыв их в любом инструменте по вашему выбору. Повторите тот же процесс для изображений светофора.
Остается последний шаг, прежде чем мы перейдем к кодированию. Как вы могли заметить, у нас есть изображения автомобилей, повернутых только вправо. Поэтому поверните изображения транспортных средств и сохраните каждое из них, чтобы получить изображения, обращенные во все стороны, как показано на изображении ниже.
Создайте папку « Traffic Intersection Simulation » и в ней создайте папку « изображений ». Здесь мы будем хранить все эти изображения. Структура папок показана ниже, где:
- вниз : содержит изображения автомобилей лицом вниз
- вверх : содержит изображения автомобилей лицом вверх
- влево : содержит изображения автомобилей лицом влево
- вправо : содержит изображения транспортных средств, повернутых вправо.
- сигналов. : содержит изображения светофоров.
. Теперь давайте погрузимся в кодирование.
Установка Pygame
Перед установкой PyGame в вашей системе должен быть установлен Python 3.1+. Вы можете скачать Python отсюда. Самый простой способ установить Pygame — использовать pip. Просто запустите следующую команду в cmd / Terminal.
$ pip install pygame
Импорт необходимых библиотек
Мы начинаем с создания файла с именем « Simulation.py » и импорта библиотек, которые нам потребуются для разработки этого моделирования.
import randomimport timeimport threadingimport pygameimport sys
Обратите внимание, что ваша структура папок на этом этапе должна выглядеть примерно так.
Структура папки проектаОпределение констант
Далее мы определим некоторые константы, которые будут использоваться при движении транспортных средств в симуляции, а также при управлении таймерами сигналов светофора.
# Значения таймеров сигналов по умолчанию в секундах defaultGreen = {0:20, 1:20, 2:20, 3:20} defaultRed = 150defaultYellow = 5signals = [] noOfSignals = 4currentGreen = 0 # Указывает, какой сигнал зеленый в настоящее времяnextGreen = ( currentGreen + 1)% noOfSignals currentYellow = 0 # Указывает, включен ли желтый сигнал или нет скорости = {'car': 2.25, 'bus': 1.8, 'truck': 1.8, 'bike': 2.5} # средняя скорость транспортных средств Координаты ниже также извлекаются путем открытия изображения четырехстороннего перекрестка в Paint / Preview и получения значений пикселей .
# Координаты начала движения автомобилей
x = {'right': [0,0,0], 'down': [755,727,697], 'left': [1400,1400,1400], 'up': [602,627,657 ]} y = {'вправо': [348,370,398], 'вниз': [0,0,0], 'влево': [498,466,436], 'вверх': [800,800,800]} транспортных средств = {'вправо': {0 : [], 1: [], 2: [], 'перекрещенный': 0}, 'вниз': {0: [], 1: [], 2: [], 'перекрестный': 0}, 'влево ': {0: [], 1: [], 2: [],' скрещенный ': 0},' вверх ': {0: [], 1: [], 2: [],' скрещенный ': 0 }} vehicleTypes = {0: 'автомобиль', 1: 'автобус', 2: 'грузовик', 3: 'велосипед'} directionNumbers = {0: 'вправо', 1: 'вниз', 2: 'влево', 3: 'up'} # Координаты изображения сигнала, таймера и количества транспортных средств signalCoods = [(530,230), (810,230), (810,570), (530,570)] signalTimerCoods = [(530,210), (810,210), (810,550), (530,550)] # Координаты стоп-линийstopLines = {'right': 590, 'down': 330, 'left': 800, 'up': 535} defaultStop = {'right': 580, 'down': 320, 'left': 810, 'up': 545} # Промежуток между транспортными средствамиstoppingGap = 15 # остановка gapmovingGap = 15 # подвижный зазор
Инициализация Pygame
Затем мы инициализируем Pygame с помощью следующий код:
pygame.init () simulation = pygame.sprite.Group ()
Определение классов
Теперь давайте создадим несколько классов, объекты которых мы будем генерировать в симуляции. У нас есть 2 класса, которые нам нужно определить.
- Сигнал трафика : нам нужно сгенерировать 4 сигнала светофора для нашей симуляции. Итак, мы создаем класс TrafficSignal со следующими атрибутами:
- красный : значение таймера красного сигнала
- желтый : значение таймера желтого сигнала
- зеленый : значение таймера зеленого сигнала
- signalText : значение таймера для отображения
class TrafficSignal:
def __init __ (self, red, yellow, green):
self.красный = красный
self.yellow = желтый
self.green = зеленый
self.signalText = ""
2. Автомобиль : это класс, который представляет объекты транспортных средств, которые мы будем генерировать в симуляции. Класс Vehicle имеет следующие атрибуты и методы:
- vehicleClass : представляет класс транспортного средства, например, легковой автомобиль, автобус, грузовик или велосипед
- скорость : представляет скорость транспортного средства в соответствии с его классом
- direction_number : представляет направление — 0 для вправо, 1 для вниз, 2 для влево и 3 для вверх
- направление : представляет направление в текстовом формате
- x : представляет текущую x-координату транспортное средство
- y : представляет текущую координату y транспортного средства
- пересекло : указывает, пересекло ли транспортное средство сигнал или нет
- индекс : отображает относительное положение транспортного средства среди движущихся транспортных средств в том же направлении и в той же полосе
- image : Представляет изображение для рендеринга
- render (): Для отображения изображения на экране
- move (): для управления движением транспортного средства в зависимости от светофора и транспортных средств впереди
class Vehicle (pygame.sprite.Sprite):
def __init __ (self, lane, vehicleClass, direction_number, direction):
pygame.sprite.Sprite .__ init __ (self)
self.lane = lane
self.vehicleClass = vehicleClass
self.speed = скорости [ VehicleClass]
self.direction_number = direction_number
self.direction = direction
self.x = x [направление] [полоса]
self.y = y [направление] [полоса]
self.crossed = 0
cars [direction] [ lane] .append (self)
self.index = len (cars [direction] [lane]) - 1
path = "images /" + direction + "/" + vehicleClass + ".png "
self.image = pygame.image.load (путь) if (len (cars [direction] [lane])> 1
and Vehicles [direction] [lane] [self.index-1] .crossed == 0 ):
if (direction == 'right'):
self.stop =
cars [direction] [lane] [self.index-1] .stop
- cars [direction] [lane] [self.index-1] ] .image.get_rect (). width
- stoppingGap
elif (direction == 'left'):
self.stop =
cars [direction] [lane] [self.index-1] .stop
+ cars [direction ] [переулок] [сам.index-1] .image.get_rect (). width
+ stoppingGap
elif (direction == 'down'):
self.stop =
cars [direction] [lane] [self.index-1] .stop
- cars [direction] [lane] [self.index-1] .image.get_rect (). height
- stopGap
elif (direction == 'up'):
self.stop =
cars [direction] [lane] [ self.index-1] .stop
+ автомобили [направление] [полоса] [self.index-1] .image.get_rect (). height
+ stoppingGap
else:
self.stop = defaultStop [направление]if ( direction == 'right'):
def render (self, screen):
temp = self.image.get_rect (). width + stopGap
x [направление] [полоса] - = temp
elif (direction == 'left'):
temp = self.image.get_rect (). width + stoppingGap
x [направление] [lane] + = temp
elif (direction == 'down'):
temp = self.image.get_rect (). height + stopGap
y [direction] [lane] - = temp
elif (direction == 'вверх '):
temp = self.image.get_rect (). Height + stoppingGap
y [направление] [дорожка] + = temp
Simulation.add (self)
screen.blit (self.image, (self.x, self.y))
Давайте разберемся с последней частью конструктора.
В конструкторе после инициализации всех переменных мы проверяем, есть ли уже транспортные средства в том же направлении и полосе движения, что и текущее транспортное средство. Если да, нам нужно установить значение « stop » для текущего транспортного средства с учетом значения « stop » и ширины / высоты транспортного средства впереди него, а также stopGap .Если впереди уже нет транспортного средства, то значение stop устанавливается равным defaultStop . Это значение stop используется для контроля места остановки транспортных средств при красном сигнале. Как только это будет сделано, мы обновим координаты места генерации транспортных средств. Это сделано для того, чтобы избежать перекрытия вновь созданных транспортных средств с существующими, когда на красный свет остановлено много транспортных средств.
Теперь поговорим о функции move (), которая является одним из наиболее важных фрагментов кода в нашем моделировании.Обратите внимание, что эта функция также является частью класса Vehicle, определенного выше, и должна иметь соответствующий отступ.
def move (self):
if (self.direction == 'right'):
if (self.crossed == 0 and self.x + self.image.get_rect (). Width> stopLines [self.direction ]):
self.crossed = 1
if ((self.x + self.image.get_rect (). Width <= self.stop
or self.crossed == 1 or (currentGreen == 0 and currentYellow == 0 ))
и (self.index == 0 или self.x + self.image.get_rect (). Width
<(cars [self.направление] [self.lane] [self.index-1] .x - movingGap))):
self.x + = self.speed
elif (self.direction == 'down'):
if (self.crossed == 0 и
self.y + self.image.get_rect (). Height> stopLines [self.direction]):
self.crossed = 1
if ((self.y + self.image.get_rect (). Height. <= self.stop
или self.crossed == 1 или (currentGreen == 1 и currentYellow == 0))
и (self.index == 0 или self.y + self.image.get_rect (). height
<(cars [self.direction] [self.lane] [self.index-1] .y - movingGap))):
self.y + = self.speed
elif (self.direction == 'left'):
if (self.crossed == 0 и
self.xself.crossed = 1
if ((self.x> = self.stop или self.crossed == 1
или (currentGreen == 2 и currentYellow == 0))
и (self.index == 0 или self.x
> (cars [self .direction] [self.lane] [self.index-1] .x
+ автомобили [self.direction] [self.lane] [self.index-1] .image.get_rect (). width
+ movingGap)) ):
self.x - = self.speed
elif (self.direction == 'up'):
if (self.crossed == 0 и
self.yself.crossed = 1
if ((self.y> = self.stop или self.crossed == 1
или (currentGreen == 3 и currentYellow == 0))
и (self.index == 0 или self.y
> (cars [self.direction] [self.lane] [self. index-1] .y
+ cars [self.direction] [self.lane] [self.index-1] .image.get_rect (). height
+ movingGap))):
self.y - = self.speed
Для каждого направления мы сначала проверяем, пересекло ли транспортное средство перекресток или нет.Это важно, потому что, если транспортное средство уже пересекло границу, оно может продолжать движение независимо от того, будет ли сигнал зеленого или красного цвета. Поэтому, когда транспортное средство пересекло перекресток, мы устанавливаем значение , пересеченное равным 1. Затем мы решаем, когда транспортное средство движется и когда оно останавливается. Транспортное средство движется в трех случаях:
- Если он не дошел до точки остановки перед перекрестком
- Если он уже пересек перекресток
- Если светофор, управляющий направлением движения транспортного средства, имеет зеленый цвет
Только в этих 3 случаях координаты транспортного средства обновляются путем увеличения / уменьшения их на скорость транспортного средства, в зависимости от их направления движения.Однако нам необходимо рассмотреть еще одну возможность, что впереди идёт автомобиль, движущийся в том же направлении и по той же полосе. В этом случае транспортное средство может двигаться только в том случае, если есть достаточный зазор до впереди идущего транспортного средства, и это решается с учетом координаты и ширины / высоты транспортного средства впереди него, а также movingGap .
Создание объектов класса TrafficSignal
Затем мы инициализируем 4 объекта TrafficSignal, сверху слева вниз слева по часовой стрелке, значениями таймеров сигналов по умолчанию.Таймер красного сигнала ts2 установлен равным сумме таймера желтого и зеленого сигналов ts1 .
def initialize ():
ts1 = TrafficSignal (0, defaultYellow, defaultGreen [0])
signal.append (ts1)
ts2 = TrafficSignal (ts1.yellow + ts1.green, defaultYellow, defaultGreen [1])
сигналов .append (ts2)
ts3 = TrafficSignal (defaultRed, defaultYellow, defaultGreen [2])
signal.append (ts3)
ts4 = TrafficSignal (defaultRed, defaultYellow, defaultGreen [3])
сигналов.append (ts4)
repeat ()
repeat () function
Функция repeat (), которая вызывается в конце функции initialize () выше, является рекурсивной функцией, которая запускает всю нашу симуляцию. Это движущая сила нашей симуляции.
def repeat ():
global currentGreen, currentYellow, nextGreen
while (signal [currentGreen] .green> 0):
updateValues ()
time.sleep (1)
currentYellow = 1
для i в диапазоне (0, 3):
для транспортного средства в транспортных средствах [directionNumbers [currentGreen]] [i]:
vehicle.stop = defaultStop [directionNumbers [currentGreen]]
while (signal [currentGreen] .yellow> 0):
updateValues ()
time.sleep (1)
currentYellow = 0сигналов [currentGreen] .green = defaultGreen [currentGreen]
сигналы [currentGreen] .yellow = defaultYellow
сигналов [currentGreen] .red = defaultRedcurrentGreen = nextGreen
nextGreen = (currentGreen + 1)% noOfSignals
сигналов [nextGreen] .red = сигналы [currentGreen] .yellow + сигналы [currentGreen] ] .green
repeat ()
Функция repeat () сначала вызывает функцию updateValues () каждую секунду для обновления таймеров сигналов, пока таймер зеленый сигнала currentGreen не достигнет 0.Затем он устанавливает этот сигнал на желтый и сбрасывает значение stop для всех транспортных средств, движущихся в направлении, управляемом сигналом currentGreen . Затем он вызывает функцию updateValues () снова через каждую секунду, пока таймер yellow сигнала currentGreen не достигнет 0. Значение currentYellow теперь установлено на 0, так как этот сигнал теперь станет красным. Наконец, значения сигнала currentGreen восстанавливаются до значений по умолчанию, значение currentGreen и nextGreen обновляется, чтобы указывать на следующие сигналы в цикле, а значение nextGreen сигнала красный таймер обновляется в соответствии с желтым и зеленым обновленного сигнала currentGreen .Затем функция repeat () вызывает себя, и процесс повторяется с обновленным сигналом currentGreen .
Функция updateValues ()
Функция updateValues () обновляет таймеры всех сигналов каждую секунду.
def updateValues ():
для i в диапазоне (0, noOfSignals):
if (i == currentGreen):
if (currentYellow == 0):
сигналов [i] .green- = 1
else:
сигналы [i] .yellow- = 1
else:
сигналы [i] .red- = 1
Функция generateVehicles ()
Функция generateVehicles () используется для создания транспортных средств.Тип транспортного средства (автомобиль, автобус, грузовик или велосипед), номер полосы движения (1 или 2), а также направление движения транспортного средства определяются с помощью случайных чисел. Переменная dist представляет совокупное распределение транспортных средств в процентах. Таким образом, распределение [25,50,75,100] означает, что существует равное распределение (по 25% в каждом) транспортных средств по всем 4 направлениям. Некоторые другие дистрибутивы могут быть [20,50,70,100], [10,20,30,100] и так далее. Новый автомобиль добавляется к моделированию каждые 1 секунду.
def generateVehicles ():
while (True):
vehicle_type = random.randint (0,3)
lane_number = random.randint (1,2)
temp = random.randint (0,99)
direction_number = 0
dist = [25,50,75,100]
if (tempdirection_number = 0
elif (tempdirection_number = 1
elif (tempdirection_number = 2
elif (tempdirection_number = 3
Автомобиль (lane_number, vehicleTypes [vehicle_type], direction_number, directionNumbers [direction_number])
раз.sleep (1)
Основной класс
И мы достигли нашего последнего фрагмента кода, основного класса, после чего мы можем увидеть нашу симуляцию в действии.
class Main:
thread1 = threading.Thread (name = "initialization", target = initialize, args = ())
thread1.daemon = True
thread1.start ()black = (0, 0, 0)
redSignal = pygame.image.load ('images / signal / red.png' )
white = (255, 255, 255)
screenWidth = 1400
screenHeight = 800
screenSize = (screenWidth, screenHeight)
background = pygame.image.load ('images / crossction.png')
screen = pygame.display.set_mode (screenSize)
pygame.display.set_caption ("SIMULATION")
yellowSignal = pygame.image.load ('images / signal / yellow.png')
greenSignal = pygame.image.load ('images / signal / green.png')
font = pygame.font.Font (None, 30) thread2 = threading.Thread (name = "generateVehicles", target = generateVehicles, args = ())
thread2.daemon = True
thread2.start () while True:
для события в pygame.event.get ():
if event.type == pygame.QUIT:
sys.exit () screen.blit (background, (0,0))
для i in range (0, noOfSignals):
if (i == currentGreen):
if (currentYellow == 1):
signal [i] .signalText = signal [i] .yellow
screen.blit (yellowSignal, signalCoods [i ])
else:
сигналов [i] .signalText = сигналов [i] .green
screen.blit (greenSignal, signalCoods [i])
else:
if (сигналов [i] .red <= 10):
сигналов [я].signalText = сигналы [i] .red
else:
сигналы [i] .signalText = "---"
screen.blit (redSignal, signalCoods [i])
signalTexts = ["", "", "", " "]
для i в диапазоне (0, noOfSignals):
signalTexts [i] = font.render (str (signal [i] .signalText), True, white, black)
screen.blit (signalTexts [i], signalTimerCoods [i])для транспортного средства в моделировании:
screen.blit (vehicle.image, [vehicle.x, vehicle.y])
vehicle.move ()
pygame.display.update ()
Давайте разберемся с Функция Main (), разбивая ее на более мелкие части.Мы начинаем с создания отдельного потока для метода initialize (), который создает экземпляры 4 объектов TrafficSignal . Затем мы определяем 2 цвета, белый и черный , которые мы будем использовать на нашем дисплее. Затем мы определяем ширину и размер экрана, а также фон и заголовок, которые будут отображаться в окне моделирования. Затем мы загружаем изображения трех сигналов, то есть красного, желтого и зеленого. Теперь мы создаем еще один поток для generateVehicles ().
Затем мы запускаем бесконечный цикл, который постоянно обновляет наш экран моделирования.Внутри цикла мы сначала определяем критерии выхода. В следующем разделе мы визуализируем соответствующее изображение сигнала и таймер сигнала для каждого из 4 сигналов светофора. Наконец, мы визуализируем транспортные средства на экране и вызываем функцию move () для каждого транспортного средства. Эта функция заставляет автомобили двигаться в следующем обновлении.
Функция blit () используется для визуализации объектов на экране. Требуется 2 аргумента: изображение для рендеринга и координаты. Координаты указывают в левом верхнем углу изображения.
Почти готово! Теперь нам просто нужно вызвать программу Main (), и наш код готов.
Main ()
Запуск кода
Пора посмотреть результаты. Запустите cmd / terminal и выполните команду:
$ python Simulation.pyСнимок окончательного результата моделирования
И вуаля! У нас есть полностью функциональная симуляция четырехстороннего перекрестка, которую мы построили с нуля, прямо от получения изображения перекрестка, сигналов и транспортных средств, до кодирования логики переключения сигналов и движения транспортных средств.
Исходный код: https://github.com/mihir-m-gandhi/Basic-Traffic-Intersection-Simulation
Это первая часть из серии статей:
Это моделирование было разработано как часть исследовательский проект «Интеллектуальное управление светофором с использованием искусственного интеллекта». Посмотрите его демонстрационное видео здесь. Эта исследовательская работа была представлена на Международной конференции IEEE по последним достижениям и инновациям в машиностроении (ICRAIE) 2020 и опубликована в IEEE Xplore.Прочтите статью здесь.
Спасибо за чтение! Надеюсь, эта статья была полезной. Если у вас есть какие-либо сомнения или вам нужны дополнительные разъяснения, не стесняйтесь обращаться ко мне по телефону LinkedIn .
Synergistic Traffic Intersection — метод координации транспортных средств и облегчения внедрения автономных транспортных средств
Квок Дж. Леунг
Бакалавр, Австралия
Адрес для корреспонденции: Квок Дж.Леунг, бакалавр, Австралия.
| Эл. Почта: |
Copyright © 2019 Автор (ы). Опубликовано Scientific & Academic Publishing.
Эта работа находится под лицензией Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/
Аннотация
Развитие автономных транспортных средств (АВ) вызывает много споров относительно того, как будет выглядеть будущее.Как только AV станут популярными, утомительное вождение уйдет в прошлое. Будет возможно автономное взаимодействие между несколькими машинами, что позволит группировать машины во взводы. Последние достижения в области AV-технологий указывают на будущее, в котором автомобили могут выполнять несколько задач вождения, повышая эффективность и безопасность вождения. Тем не менее, эти достижения в области AV-технологий относятся только к вождению по открытой дороге, что является хорошо изученной и относительно простой проблемой. Пробки на дорогах больше не будут вызваны пилотом-человеком, а скорее способом координации транспортных средств, особенно там, где множество дорог пересекаются друг с другом.Автономное управление перекрестками (AIM) — это предлагаемый метод, который использует преимущества повышенной точности и чувствительности AV за счет использования датчиков на транспортных средствах, чтобы предвидеть, когда каждый из них достигнет перекрестка, и корректировать свой маршрут и скорость для проезда без остановки, устраняя трафик сигналы в целом. Однако мы ожидаем, что внедрение антивирусной техники произойдет в течение длительного переходного периода, и нереально предполагать, что все автомобили будут обладать полностью автономными возможностями на любом этапе будущего, поскольку уже существует тенденция к сбору и модификации автомобилей.В этом документе будет предложено альтернативное решение унаследованной проблемы управления перекрестками. Протокол Synergistic Traffic Intersection был протестирован при моделировании, и были получены экспериментальные результаты, которые убедительно свидетельствуют об эффективности этого подхода. Кроме того, в этом отчете обсуждается значение этой технологии с точки зрения городского и транспортного планирования.
Ключевые слова: Пробки, Автономное управление перекрестками, Координация движения, Автономные транспортные средства
Цитируйте эту статью: Kwok J.Леунг, Синергетическое пересечение трафика — метод координации транспортных средств и облегчения внедрения автономных транспортных средств, Международный журнал дорожной и транспортной инженерии , Vol. 8 No. 1, 2019, pp. 1-7. DOI: 10.5923 / j.ijtte.201.01.
1. Введение
- ПОСЛЕДНИЕ разработки в области искусственного интеллекта и электромобилей позволили разработать автономные транспортные средства (АВ), которые продемонстрировали убедительный уровень безопасности и эффективности, побуждая людей-водителей отказаться от пилотирования своих транспортных средств. .Проектируя будущее этой технологии, Дреснер и Стоун предложили новый протокол транспортных перекрестков под названием Autonomous Intersection Management (AIM). Он показывает, что, используя возможности сети и управления AV, можно разработать протокол, который позволит транспортным средствам проезжать перекресток без необходимости останавливаться. Полное устранение необходимости в светофорах [1]. Этот протокол разработан для случаев, когда все транспортные средства полностью автономны.Однако полный переход на AV маловероятен. С момента изобретения автомобилей люди использовали их не только как инструмент для перевозки предметов и пассажиров, но также как для досуга и как предметы коллекционирования. Даже если вмешательство правительства может полностью объявить вне закона все автомобили без автономных возможностей, когда и как произойдет этот переход? А как обучать участников дорожного движения? Кроме того, AIM предлагает протокол, который позволит транспортным средствам приближаться к перекрестку без остановки, выполняя маневры при почти промахах от других AV.Результаты моделирования протокола AIM действительно заманчивы, но не учитывают множество факторов, влияющих на участников дорожного движения. Поэтому важно разработать систему, которая будет способствовать плавному переходу от людей-водителей к AV, учитывая улучшение существующей инфраструктуры и внедрение организованной и безопасной системы управления перекрестками. В этой статье представлен новый протокол, называемый «синергетическое пересечение трафика (ST-I)», путем разработки эксперимента, который может оценить ST-I и соответствующее стандартное пересечение, а также дальнейшая оценка влияния этой технологии на совместно используемую AV-систему. экономика с точки зрения городского и транспортного планирования.
2. Предварительный
- Текущее сообщество транспортных потоков часто использует повороты без правого поворота (LHD) для улучшения транспортного потока, что устраняет точки конфликта между движением, поворачивающим направо, и встречным движением. На типовой транспортной развязке используется 4-х фазная система, учитывающая 4 направления движения. Удаление правых поворотов позволяет создать двухфазную систему, позволяющую получать более частые и более длинные сигналы «идти». Существенный вклад в создание зеленой волны и полное использование двоичной системы.Возможно, это неэффективно, поскольку требуются альтернативные маршруты и дополнительные маневры, что увеличивает время в пути. Перекресток с непрерывным потоком также использует 2-фазную систему и перемещает правый поворот, позволяя сквозному движению продолжать движение, обеспечивая при этом защищенное движение правого поворота [2]. Однако эта конструкция не предназначалась для использования в городской среде из-за требований к общей площади и неудобств, причиняемых велосипедистам и пешеходам. Конструкция преимущественно ориентирована на транспортный поток без учета автобусов и тихоходных транспортных средств, что означает, что состав транспортного потока в CFI является единичным [3]. CFI предполагает строительство дополнительного покрытия для формирования пролета правого поворота, позволяющего смещенный правый поворот. Дополнительное покрытие значительно расширяет перекресток, это способствует разделению инфраструктуры со всех сторон перекрестка. Следовательно, существует компромисс между доступным пространством и желаемой скоростью движения автомобиля. Кроме того, CFI работает с высокой скоростью транспортного средства, что снижает беспокойство велосипедистов и пешеходов. По вышеуказанным причинам CFI не мог служить жизнеспособным решением проблемы городских заторов.Тем не менее, мы можем вывести альтернативу, обеспечив при этом учет коротких падений CFI. Синергетическая транспортная развязка — это применение технологии CFI, которая улучшает методы, смещая правый поворот в пределах первоначальной планировки дороги, и вводит клиновидную очищенную зону, позволяющую транспортным средствам с несколькими осями завершить повороты [4 ]. Конструкция ST-I включает незначительные изменения в гражданской архитектуре, дорожной разметке и добавление светофоров на перекрестке среднего квартала.Этот проект будет рентабельным, и его можно будет быстро построить, поскольку не потребуется дополнительное строительство дороги. ST-I требует равного или меньшего пространства по сравнению с традиционной концепцией и требует незначительных изменений в текущем поведении вождения. В следующих главах представлена геометрическая схема ST-I, в которой обсуждается конструкция транспортного пространства, схема организации дорожного движения и схема управления дорожным движением. Кроме того, чтобы оценить проект с точки зрения транспортного потока, был проведен эксперимент по оценке характеристик ST-I и обычных перекрестков (CI) с использованием программного обеспечения для микросимуляции VISSIM, что позволило сделать выводы о пригодности ST -I как жизнеспособное решение проблемы городских пробок.
3. Синергетическая транспортная развязка
- A. Геометрическая модель ST-I. Перекресток в середине квартала размещается на дороге на практическом расстоянии от перекрестка, показанного на рисунке 1. Перекресток в середине квартала будет использоваться в качестве общего пространства для перемещения автомобилей, поворачивающих направо. Транспортные потоки с поворотом направо собираются на полосе правого поворота перед перекрестком в середине квартала (полоса 4), обеспечивая достаточное пространство для пересечения встречного встречного движения в направлении самой дальней правой полосы (полоса 6) до основного перекрестка в стадии подготовки правого поворота.Транспортные средства, поворачивающие направо, проезжают через главный перекресток и попадают в полосу приема движения, направленного на север. Транспортные средства, поворачивающие налево, проезжают перекресток в середине квартала, используя полосу 1, оставаясь в полосе 1, когда они проезжают через главный перекресток в полосу приема движения, направленного на юг. Сквозной транспортный поток будет проходить мимо перекрестка в середине квартала с использованием полос 2 и 3, поскольку они будут проходить прямо через главный перекресток на полосу приема и продолжить движение в западном направлении.
| Рис ure 1 . 6×6 Синергетическая транспортная развязка |
| F ig ure 2. Организация движения автомобилей с правым поворотом |
| F ig ure 3 . Фазы сигнала ST-I |
4. Пример использования
4.1. Test Intersection
- VISSIM использовался для обеспечения оценки CI при четырехфазном управлении сигналом со специализированными полосами для правого поворота и полосами для левого поворота с разделением каналов.Соответствующий дизайн ST-I на рисунке 4 показывает визуальный результат микромимулятора VISSIM при оценке CI и ST-I.
| Рис ure 4 |
4.2. Моделирование
- Для наблюдения за предлагаемым ST-I при различных условиях интенсивности движения в этом исследовании разработано несколько сценариев, которые перечислены ниже. a) Предполагая, что каждая входная полоса имеет одинаковый спрос и объем трафика, объемы трафика CI и ST-I были установлены на 1000 автомобилей в час, 2000 автомобилей в час, 3000 автомобилей в час, 4000 автомобилей в час, 5000 автомобилей в час. / час, 6000 автомобилей / час и 7000 автомобилей / час.Отображение различных условий движения от свободного до перенасыщенного. b) Каждый объем движения будет моделироваться в течение 1 часа, всего 7 часов для каждого проекта перекрестка. Коэффициенты поворота вправо-прямо-влево выставлены на 0,25-0,6-0,15 соответственно. c) Общее время цикла будет установлено на 120 с. Чтобы преодолеть стохастический характер результатов моделирования, было использовано в среднем 20 симуляций.
5. Результаты
- Индикаторами производительности в этом исследовании являются средняя задержка (Delay) и средняя длина очереди транспортных средств (Queue).
5.1. Оценка эффективности трафика
- Результаты моделирования, оценивающие семь условий движения, показаны в таблицах 1 и 2 и на рисунке 5. & Рис.6. На протяжении всего процесса моделирования ST-I показывает стабильное увеличение задержки и очереди по сравнению с CI. CI показывает значительное увеличение задержки между 4000 и 5000 автомобилей / ч, тогда как ST-I показывает относительно стабильную тенденцию. Длина очереди для CI также представляет большее увеличение длины после 4000 автомобилей в час / ч, тогда как ST-I показывает меньшее увеличение градиента.
| |||
| Таблица 2 . Средняя задержка ST-I и CI при разных объемах трафика |
| Fig ure 5. Средняя длина очереди (м) в зависимости от объема трафика |
| F ig ure 6 . Средняя задержка (с) по сравнению с объемом трафика |
6. Обсуждения
- Приведенные выше модели демонстрируют ST-I с характеристиками человеческого водителя и предоставляют доказательства, подтверждающие эффективность ST-I. Потребуются дополнительные модели, чтобы оценить изменяющийся состав AV и человеческих водителей.Ожидается, что эффективность повысится за счет повышенной точности и чувствительности AV. В этом разделе мы обсудим значение ST-I с появлением AV и обсудим значение этого протокола для текущих методов городского планирования, подчеркнув при этом ожидаемые нами изменения в отношении общественного транспорта. Благодаря широкомасштабному внедрению технологий ST-I и AV, перегрузка трафика будет уменьшена. Фантомный эффект, описанный Газисом и Херманом [7], будет уменьшаться из-за способности AV общаться и перемещаться в кластерах.Маршрутизация AV будет предопределена в начале пути с корректировкой в соответствии с условиями движения в реальном времени. Внедрение ST-I упростит использование AV, повысит удобство и позволит пассажирам путешествовать на большее расстояние с меньшими затратами времени. Кроме того, по мере того, как AV-технология становится все более распространенной, концепция общего транспортного средства будет все более использоваться из-за ее удобства и более низкой общей стоимости. Как следствие, это 1) Уменьшает заторы на дорогах 2) Общественный транспорт, такой как автобусы, будет значительно улучшен 3) Меньше времени, затрачиваемого на пробки, увеличивая точность расписания общественного транспорта 4) Спрос на парковка также значительно сократится, что позволит убрать уличную парковку на наших городских дорогах, потому что пустые автономные транспортные средства могут самостоятельно перемещаться на удаленную парковку [8].Обеспечение лучшего использования дорог другими участниками дорожного движения (например, велосипедистами, пешеходами и местами общего пользования). 5) Компьютеризированная система управления переходами может использоваться по всей сети, чтобы гарантировать, что AV могут маршрутизироваться на основе распределения временных интервалов [9]. Разрешение AV проезжать через перекрестки как можно чаще. Это означает, что дизайн нашей городской среды кардинально изменится, снизится общий спрос на магистральные дороги, и в то же время дороги без магистральных дорог станут более удобными для пешеходов и велосипедистов.
7. Синергетическая реконфигурируемая транспортная развязка
- Как только АВ станут преимущественно используемыми транспортными средствами, мы сможем ввести дополнительные правила дорожного движения, чтобы изменить способ координации транспортных средств, чтобы извлечь выгоду из точности и чувствительности АВ. ST-I может быть легко преобразован в синергетический реконфигурируемый транспортный перекресток (SRT-I), см. Рис. 7, который включает в себя перемещение защищенного правого поворота в среднем блоке в сторону полосы обочины. Это позволит средним полосам движения обслуживать только прямолинейные транспортные средства.Затем эти полосы могут использовать реверсивные полосы, по которым трафик может двигаться в любом направлении, в зависимости от отображаемого служебного сигнала в соответствии с потребностями трафика в реальном времени.
| Рис ure 7 . Синергетическое реконфигурируемое перекресток трафика |
8. Выводы
- В этой статье предлагается альтернатива предлагаемому методу, известному как автономное управление перекрестками, с учетом ограничивающих факторов, которые могут препятствовать внедрению такой системы в реальных условиях. Мир.И разработать процесс, позволяющий внедрить автомобили с автономными возможностями и согласованным протоколом, который позволит перейти от людей-водителей к AV. Мы представляем Synergistic Traffic Intersection и предоставили проектные эксперименты в качестве доказательства эффективности системы. В этом документе утверждается, что эта система является альтернативой традиционному управлению перекрестками и координации, а также проливает свет на влияние ST-I на текущее состояние дорожного движения, одновременно обеспечивая процесс, способствующий внедрению AV.
Приложения
- Анализ траектории движения Анализ траектории движения синергетического транспортного пересечения с использованием AutoTurn, ведущего в отрасли программного обеспечения для анализа траектории движения транспортных средств и моделирования поворота. См. Рис. 8. В соответствии с транспортными средствами австралийской разработки — Austroads 2013, 19-метровый первичный двигатель и полуприцеп, ширина 2,5 м x длина 19 м, ширина / ширина 13,245 м.
| Рис ure 8 . Анализ траектории |
Каталожные номера
| [1] | Дреснер, К. и Стоун, П. (2008 г.), «Многоагентный подход к автономному управлению перекрестками». В журнале исследований искусственного интеллекта (JAIR), март 2008 г. |
| [2] | Р. Голдблатт, Ф. Майер и Дж. Фридман (1994).Пересечения непрерывных потоков, ITE Journal, Vol. 64, No. 7, July 1994. |
| [3] | Liu, Q., Zhang, L., Yang, W. (2012). Новое пересечение с непрерывным потоком для городских дорог: архитектура, проектирование и моделирование, Прикладная механика и материалы Vols. 209-211 (2012), стр. 677-682. |
| [4] | Leung. В.Ю.Й (2017). Synergistic Traffic Intersection, WO2017197460 Получено с https://0x9.me/uJLdf. |
| [5] | Austroads (2017).Руководство по проектированию дорог, часть 4A: Несигнализируемые и сигнальные перекрестки, третье издание. Austroads Ltd. Австралия. ISBN: 978-1-925451-73-3. |
| [6] | Webster F. V. (1963). Практика организации дорожного движения, 1963), с.117-146. Современное состояние — необходимое условие для публикации в исследовательских журналах IET. |
| [7] | Gazis, D. & Herman, R. (1992). «Движущиеся и« фантомные »узкие места» Транспортная наука 199226: 3, 223-229. |
| [8] | Y.Wiseman (2018), «В эпоху автономных транспортных средств рельсы устарели», Международный журнал управления и автоматизации, Vol. 11 (2), pp. 151-160, 2018. |
| [9] | Y. Wiseman (2019), «Автономные транспортные средства», Энциклопедия организационных знаний, администрирования и технологий, первое издание, 2019 г. Доступно по адресу: http://u.cs.biu.ac.il/~wiseman/autonomousr.pdf. |
| 1 | Джефферсон / Пасео-дель-Норте | 156 214 | 162 884 | 165,381 | 154 784 | 162 804 | 802 067 | 5 | Панамериканский Запад / Пасео-дель-Норте | 155 297 | 156 863 | 157 465 | 118 412 | 121 635 | 709 672 | 12 | Южный бульвар / Государственная дорога Нью-Мексико 528 | 114,951 | 114 493 | 120 605 | 120 038 | 117,650 | 587 737 | 14 | Пасео-дель-Норте / Вайоминг | 122516 | 116 671 | 118 650 | 110 764 | 112 010 | 580 611 |
ПРОМЕЖУТОЧНАЯ КОРРЕКТИРОВКА ДОРОЖНОГО ДВИЖЕНИЯ ДЛЯ ПЕРЕСЕЧЕНИЯ ЮЖНОЙ И ГЛАВНОЙ УЛИЦ, ЗАПЛАНИРОВАННАЯ УСТАНОВКА 13 АПРЕЛЯ — Город Медфорд, Массачусетс
После утверждения Комиссией по дорожному движению в январе 2021 года MassDOT внесет временные изменения в схему движения на перекрестке в апреле этого года.
MEDFORD — В среду, 14 апреля 2021 г. (при благоприятных погодных условиях), на пересечении улиц Саут-стрит и Мэйн-стрит проводится серия временных изменений схемы движения, о чем сегодня объявили городские власти и Министерство транспорта штата Массачусетс (MassDOT). Осенью 2020 года MassDOT объявила о планах по развитию более крупномасштабных улучшений безопасности на пересечении Мэйн-стрит и Саут-стрит в Медфорде. В то время как город и штат продолжают работать над этими постоянными изменениями на пересечении, такие изменения потребуют значительного времени, чтобы полностью разработать и внедрить.В интересах безопасности город Медфорд в сотрудничестве с MassDOT разработал пилотный проект краткосрочных временных улучшений на перекрестке.
План обсуждался дорожной комиссией Медфорда на открытом заседании 19 января 2021 года.
Промежуточные улучшения будут включать перекрашивание разметки полос на Саут-стрит и Мейн-стрит и размещение временных баррикад на перекрестке для определения новых ограничений поворота. Новые предлагаемые схемы движения будут включать:
- На Саус-стрит: Транспортные средства могут повернуть налево или направо на Мэйн-стрит, но им будет запрещено проехать прямо на съезд на Восточную трассу 16, которая соединяется с I-93.
- На главной улице в северном направлении (в сторону Медфорд-сквер): Разметка переулка будет лучше определять одну «прямую» полосу и одну полосу «направо», ведущую к съезду на Восточную трассу 16, которая соединяется с I-93.
- На Мейн-стрит в южном направлении (в направлении Сомервилля / Бостона): Повороты налево на съезд на Восточный маршрут 16, который соединяется с I-93, будут ограничены.
Промежуточные пилотные варианты разработаны с учетом безопасности всех участников дорожного движения, но достаточно гибки, чтобы вносить коррективы по мере необходимости.
MassDOT будет внедрять новую схему движения, начиная с 20:00 во вторник, 13 апреля -го (если позволяет погода), работая в ночное время. Электронные доски объявлений будут установлены в районе и вокруг него, чтобы помочь направить движение до и после внесения изменений. Для получения подробной информации, включая план новой планировки и предлагаемые альтернативные маршруты доступа к I-93, посетите www.medfordma.org/transportation.
Городские услуги Медфорда доступны для всех жителей, независимо от расы , этнической принадлежности, сексуальной ориентации, религии, возраста, языковых навыков, экономического положения или иммиграционного статуса.
###
Перекресток нового поколения помогает всем режимам проезжать по улице | by Willa Ng | Sidewalk Talk
Новые технологии движения обещают повысить безопасность при перемещении всех, а не только водителей.
В своем стремлении к более безопасным улицам и нулевому уровню смертности в результате дорожно-транспортных происшествий все больше и больше городов сосредотачивают свое внимание на перекрестках. Несмотря на всю свою известность и организационную мощь, перекресток также является источником большого стресса и разочарования.Это может быть опасно: около 40 процентов аварий происходит на перекрестках, а около половины аварий со смертельным исходом связаны с поворотами. Традиционная диаграмма, используемая транспортными инженерами для типичного перекрестка, показывает не менее 56 конфликтных точек для транспортных средств и пешеходов.
Проблемы безопасности перекрестка привлекли внимание, поскольку люди переключаются на другие виды транспорта, помимо автомобилей, для передвижения по городским улицам. Многие города теперь поощряют езду на велосипеде, пешие прогулки, общественный транспорт и другие альтернативы вождению для повышения устойчивости, равенства и доступности.Они снижают ограничения скорости для автомобилей, чтобы повысить безопасность пешеходов. Они превращают дорожное пространство в транзитные полосы, велосипедные станции или пешеходные площади. Во многих отношениях города возвращаются в будущее, отдавая приоритет тому типу общего доступа к улицам, который был раньше, чем автомобили.
Эти тенденции представляют собой следующий этап городской мобильности, но инструменты, которые города используют для управления своими перекрестками, отстают от времени. Старый добрый светофор отлично справляется с организацией сложного движения автомобилей и оптимизацией скорости движения.Он не был создан для задач повышения безопасности и перемещения людей с использованием других режимов.
Нет простого решения для переполненных перекрестков, но можно представить, как цифровые технологии, которые не были доступны еще пять лет назад, обещают сделать перекресток более быстрым. Массивы датчиков и компьютерное зрение могут сделать обнаружение нескольких уличных пользователей легко достижимым, потенциально обеспечивая более точный подсчет всех режимов и принимая решения о потоке движения и приоритетах.Шагая дальше, машинное обучение становится все более способным улучшать большие сложные системы, аналогичные трафику. Обработка на месте может снизить потребность в дорогостоящей установке оптоволокна и обеспечить большую безопасность и конфиденциальность данных.
Чтобы понять, почему эти инструменты представляют собой шаг вперед, это помогает в первую очередь лучше понять проблему.
Старые инструменты для новых улицПервоначальной технологией перекрестков был скромный инспектор дорожного движения. Когда в первые годы 20-го века автомобили впервые появились на городских улицах, хаос из пешеходов, экипажей и автомобилей, которые боролись за космос, требовал суждений, осмотрительности и приспособляемости в реальном времени, которые мог обеспечить только человек. .Этот личный контроль был самым безопасным и справедливым способом для всех разделить дорогу.
Автомобили вскоре выиграли битву за городские улицы, и сосредоточение внимания на одном режиме позволило применить более упрощенное управление улицами, на которое сегодня полагаются города, — в первую очередь, светофор. Функция (и даже форма) этого инструмента не сильно изменилась за десятилетия. Неудивительно, что когда города сегодня хотят управлять непослушным или сложным перекрестком, они вообще не полагаются на светофор — они посылают гаишника.
Когда города хотят управлять непослушным или сложным перекрестком, они вообще не полагаются на светофор — они присылают гаишника. (Ник Харрис / Flickr)Ограничения светофора затрудняют адаптацию городов к современным вызовам мобильности. Например, сигналы фиксированного времени не могут отрегулировать, если перекресток внезапно заполнен людьми, бегающими трусцой или едущими на велосипеде теплым весенним днем, вместо того, чтобы обрабатывать обычную очередь машин в разгар зимы. Они не обращают внимания на количество машин, движущихся в каждом направлении, иногда останавливая длинную очередь на короткую.Датчики срабатывающих сигналов могут обнаруживать очередь автомобилей, но большинство из них не может обнаруживать пешеходов, велосипедистов или транзитные транспортные средства, не говоря уже о том, чтобы определять приоритеты этих режимов.
Города используют различные подходы к решению своих уличных проблем, и многие из них не используют новые технологии. В некоторых районах применяются улучшения городского дизайна, такие как переход от светофоров к перекресткам с круговым движением, простые остановки с четырьмя путями или голландские модели woonerfs . Эти средства управления в равной степени игнорируют уличную среду, но, по крайней мере, они успокаивают движение и повышают безопасность.
В других городах начали искать варианты адаптивного управления сигналом, такие как SCATS, SCOOT, ATC-Lite. Эти адаптивные системы применялись в различных ситуациях с улучшениями от резких до незначительных. Но такие системы редки; большинство городов США полагаются на сигналы фиксированного времени или централизованный контроль через центры управления транспортом. В TMC операторы просматривают прямую трансляцию условий движения на перекрестке и выбирают из ряда предварительно утвержденных планов сигналов, которые могут или не могут полностью решить данную проблему.Задержка в ответе может быть мучительной для тех, кого она затронула, и системам все еще трудно учесть альтернативные способы.
Набор транспортных технологий нового поколения — хотя он все еще нуждается в тщательном тестировании и доработке — по крайней мере, может помочь городам управлять своими улицами с возможностью быстрого принятия решений инспектором дорожного движения. Их повышенная осведомленность обо всех путешественниках дает надежду на повышение безопасности на улицах, а также помогает перемещать всех людей, а не только водителей.
Делаем перекрестки более безопасными и справедливымиКогда вы переосмысливаете светофоры с этими расширенными возможностями, вы начинаете видеть некоторые ключевые потенциальные преимущества с точки зрения безопасности дорожного движения и транспортной справедливости:
Безопасность . Перекресток, который знает скорость и объем всех режимов, может вносить изменения, предупреждающие людей о столкновениях или опасностях. Такая адаптивность может оказаться особенно полезной для городов, проводящих политику Vision Zero по сокращению числа дорожно-транспортных происшествий.
Например, технические сигналы могут замедлить движение транспортных средств, если средняя скорость автомобиля на данном перекрестке превышает 20 миль в час (порог, при котором столкновения с пешеходами становятся более смертоносными) или если они фиксируют большое количество возможных аварий. Они также могут подавать сигналы пешеходного перехода, чтобы оставить больше времени для детей, пожилых людей или инвалидов. В сочетании с новыми системами оповещения, автомобильными системами или технологией V2X они также потенциально могут дать водителям более прямое предупреждение о пешеходах или велосипедистах в этом районе.
Такие фонари будут безопаснее и для людей в автомобилях. На городской магистрали с фиксированным таймером водители могут увеличивать скорость, когда светофор становится зеленым, только для того, чтобы нажать на тормоз на красный свет на следующем перекрестке. Это бесконечное ускорение и замедление увеличивает риск наезда сзади и побуждает водителей ехать быстро в надежде включить свет. Но коридор, оптимизированный для постоянного потока, может разнести машины и дать водителям больше буферного пространства для реакции на смену полосы движения или внезапную остановку.
Пропускная способность . Традиционно «успех» перекрестка оценивался по его способности перемещать как можно больше автомобилей с максимально возможной скоростью. Это определение меняется. В январе Федеральное управление шоссейных дорог объявило, что начнет измерять характеристики дороги с точки зрения количества перемещенных человек и человек, а не только автомобилей, уделяя больше внимания транзитным транспортным средствам, пешеходам и велосипедистам.
Одним из больших преимуществ измерения количества людей является лучшая координация существующей инфраструктуры.Отдавая приоритет людям перед автомобилями, адаптивная технология перекрестков может побудить путешественников переключиться с вождения на другие режимы. И (внимание ботаников) движение не является линейным, а это означает, что удаление всего нескольких автомобилей с дороги может значительно улучшить ситуацию с заторами, по крайней мере, в краткосрочной перспективе.
Адаптивные системы не только поддерживают все режимы, но и могут улучшить коммутируемость. Поездка на работу доставляет гораздо больше разочарований, если она занимает 20 минут в один день и 40 минут в следующий, по сравнению с постоянными 30-минутными поездками на работу, даже если среднее время, затрачиваемое на поездку, такое же.Поддерживая постоянную скорость движения — даже на более низких и безопасных скоростях — адаптивные перекрестки могут сделать поездки более надежными и предсказуемыми как для водителей, так и для пассажиров общественного транспорта.
Опять же, адаптивные светофоры с технологией сами по себе не решат проблем безопасности дорожного движения или пробок в городах. Они также не устранят необходимость в четкой транспортной политике, инженерном анализе или физических улучшениях. Во всяком случае, они увеличивают эту потребность, поскольку местные сообщества устанавливают приоритеты для контроля дорожного движения.И перед этими системами по-прежнему стоит множество других проблем: точный подсчет пешеходов, велосипедистов и пассажиров на перекрестке с помощью цифровых инструментов; защита всех данных; и держать стоимость таких технологий в пределах досягаемости правительства среднего города.
Знаю, знаю. Мы движемся к будущему летающих автономных транспортных средств, которые могут сделать светофоры устаревшими. Но пока этот день не наступит, города могут предпринять множество шагов для создания более безопасных улиц, подходящих для всех.
Следите за тем, что Sidewalk Labs думает, делает и читает, с помощью нашего еженедельного информационного бюллетеня или в Twitter и Facebook .
Моделирование транспортного потока на городском сигнальном перекрестке с трансграничной рабочей зоной
Рабочие зоны широко распространены на городских дорогах во многих странах и оказывают значительное негативное влияние на движение транспорта. Немногочисленные исследования были посвящены моделированию транспортного потока в рабочей зоне на городских магистралях, особенно в рабочей зоне на перекрестках.В этой статье предлагается микроскопическая модель, основанная на теории социальных сил, для транспортного потока на перекрестке с определенной рабочей зоной, называемой трансграничной рабочей зоной. Модель может фиксировать характеристики движения без разделения полос и нерегулярных границ движения на перекрестке с трансграничной рабочей зоной, а также может отражать взаимодействие транспортных потоков на перекрестке с двух противоположных направлений. Предлагаемая модель откалибрована и проверена с использованием данных реальной рабочей зоны, и результаты показывают, что все значения MARE меньше 10%.Факторы, влияющие на транспортный поток в зоне трансграничных работ, анализируются с помощью моделирования. Наше исследование показывает, что расстояние от нижнего края рабочей зоны до среднего разделителя дороги и доля крупных транспортных средств в рабочей зоне оказывают наибольшее влияние на сигнализацию перекрестка, что обеспечивает ориентир для будущего управления движением на пересечение с трансграничной рабочей зоной.
1. Введение
Рабочие зоны широко распространены как на автострадах, так и на городских магистралях во многих странах и оказывают значительное негативное влияние на дорожное движение.Согласно существующим исследованиям, рабочие зоны вызовут сильные пробки и больше дорожно-транспортных происшествий [1–7]. Необходимо искать способы уменьшения влияния рабочих зон на движение транспорта.
Несмотря на то, что были проведены многочисленные исследования проблем движения в рабочих зонах, они в основном были сосредоточены на проблемах движения в рабочих зонах автомагистралей, таких как безопасность движения [8], пропускная способность дорог [9] и задержки движения [10]. Исследования рабочих зон городских артерий очень ограничены [11–15].Во многих странах существует множество рабочих зон, расположенных как на сегментах дорог, так и на перекрестках городов, и в этой статье основное внимание уделяется рабочим зонам перекрестков на городских магистралях. Рабочие зоны пересечения можно разделить на два типа: островная рабочая зона и рабочая зона трансмиссии (см. Рисунок 1). Островная рабочая зона относится к рабочей зоне, которая полностью расположена в пределах зоны пересечения (см. Рисунок 1 (а)). Раздвижная рабочая зона относится к рабочей зоне, которая охватывает как перекресток, так и участок дороги (см. Рисунок 1 (b)).Ян и др. [7] предложили модель транспортного потока для островной рабочей зоны и проанализировали характеристики транспортного потока. Однако модель транспортного потока для трансграничной рабочей зоны еще не предложена.
Таким образом, в данной статье делается попытка предложить микроскопическую модель транспортного потока для трансграничной рабочей зоны. Как показано на Рисунке 1 (b), в зоне трансграничных работ часть первоначального пространства перекрестка занята трансграничной рабочей зоной, а проходимое пространство серьезно сокращено, что делает транспортный поток в зоне трансграничных работ более заметным. разные характеристики при нормальном трафике.Во-первых, зона трансграничной рабочей зоны не имеет разделительных полос, поэтому транспортные средства не могут двигаться прямо в такой зоне. Во-вторых, граница проезжей части перекрестка становится более неровной, что вызывает больше конфликтов между транспортными средствами. Существующие микроскопические модели транспортного потока, такие как модели следования за автомобилем и модели смены полосы движения, не могут уловить вышеупомянутые характеристики по той причине, что они были разработаны для транспортного потока, основанного на полосе движения, в обычной проходимой зоне [16, 17] .Кроме того, транспортный поток при выполнении трансграничных работ также отличается от транспортного потока в рабочей зоне острова. В островной рабочей зоне два транспортных потока с противоположных направлений разделены рабочей зоной (как показано на Рисунке 1 (а)). Между тем, в зоне трансграничных работ транспортный поток сильно взаимодействует со встречным транспортным потоком. Таким образом, предложенная авторами в [7] модель транспортного потока для островной рабочей зоны не может быть применена к транспортному потоку в трансграничной рабочей зоне, и необходима новая модель.В нашем исследовании теория социальной силы применяется для моделирования транспортного потока в трансграничной рабочей зоне, и мы строим модель, не основанную на полосах движения, чтобы преодолеть недостатки обычных микроскопических моделей транспортных потоков, которые описывают транспортный поток в трансмиссионная рабочая зона.
Остальная часть статьи организована следующим образом. В разделе 2 дается обзор существующих исследований по зонам работы и теории социальной силы. В разделе 3 представлена предлагаемая модель транспортного потока в зоне трансграничных работ.Раздел 4 калибрует и проверяет предложенную модель с использованием собранных данных. В разделе 5 обсуждаются моделирование и анализ на основе предложенной модели. Раздел 6 завершает документ и обсуждает будущую работу.
2. Обзор литературы
Все больше внимания уделяется исследованию рабочих зон, расположенных на городских магистралях. Некоторые работы были сосредоточены на рабочих зонах на артериальных сегментах между двумя пересечениями. Sadegh et al. [18] применили модели следования за автомобилем и смены полосы движения для описания транспортного потока в рабочей зоне на артериальном сегменте и далее разработали инструмент моделирования под названием ARTWORK для оценки систем управления движением в условиях, когда полосы движения закрыты в непосредственной близости от сигнальные перекрестки.Джозеф и др. [19] разработали инструмент для анализа и оценки трафика в случае, если полоса движения закрыта между двумя сигнальными перекрестками, который получил название WZATA. Цыганов и др. [20, 21] собрали данные о дорожно-транспортных происшествиях в рабочих зонах на городских магистралях в городских районах Остина, Сан-Антонио и Хьюстона, чтобы дать предложения по улучшению управления движением в рабочей зоне городских магистралей. Heaslip et al. [22] использовали метод моделирования для оценки пропускной способности рабочих зон на артериальных сегментах с учетом различных факторов, включая процент транспортных средств, поворачивающих налево, расстояние между рабочей зоной и перекрестком вниз по течению, а также g / C (эффективное значение от зеленого до длина цикла) каждой группы полос.Они пришли к выводу, что рабочие зоны на артериальных сегментах влияют на емкость всей артерии, и на результаты сильно влияет расстояние между рабочей зоной и нижним пересечением. Hou et al. [15] предложили четыре модели, основанные на машинном обучении: случайный лес, дерево регрессии, многослойная нейронная сеть с прямой связью и непараметрическая регрессия. Для прогнозирования транспортного потока в городской рабочей зоне были собраны два набора данных для пересечения скоростных автомагистралей и городских дорог.
В некоторых исследованиях изучались рабочие зоны, расположенные на перекрестках, и изучались улучшения конструкции сигналов [13], вопросы безопасности [11] и стратегия компоновки рабочих зон [12]. В обзоре [23] качественно предложено несколько методов улучшения схемы сигналов пересечения с рабочей зоной, таких как регулировка фазы и времени сигнала, сокращение продолжительности цикла и приспособление пешеходов. Однако предложенным методам не хватало реальных данных и научного анализа. Ли и Бай [11] изучали аварии в рабочих зонах перекрестков и обнаружили, что количество аварий на перекрестках было намного меньше, чем количество аварий на перекрестках, что может быть связано с относительной более низкой скоростью транспортных средств на перекрестках.Шаабан и Эльнашар [12] обсудили вопросы рабочих зон перекрестка и представили стратегию расположения рабочих зон на перекрестке. Ян и др. [14] собрали данные о рабочей зоне перекрестка и предложили модель линейной регрессии для оценки пропускной способности пересечения городского сигнала с рабочей зоной. Однако их модель была статистической, и механизм воздействия рабочих зон на транспортный поток на перекрестках оставался неизвестным. Недавно Yang et al. [7] сосредоточили внимание на конкретном типе рабочей зоны, которая расположена в пределах зоны перекрестка, а именно, на рабочей зоне острова, и предложили новую модель транспортного потока в рабочей зоне острова, основанную на теории социальных сил.Они оценили предложенную модель по данным зоны полевых работ, в то время как результаты показали, что модель получила высокую производительность.
Таким образом, большинство существующих исследований артериальных рабочих зон сосредоточено на рабочих зонах на участках дороги. Немногочисленные исследования рабочих зон на перекрестках моделируют транспортный поток в трансграничной рабочей зоне. Следовательно, необходима новая модель, чтобы лучше исследовать характеристики транспортного потока в зоне трансграничных работ.
3. Разработка модели
3.1. Анализ поведения водителя в переходной рабочей зоне
Когда на перекрестке существует переходная рабочая зона, поведение водителя, очевидно, изменяется. Мы выделили пять типов поведения водителя: поведение при свободном вождении, поведение следования, поведение слияния, поведение рассеивания и поведение при перемещении. Поведение при свободном вождении означает, что транспортные средства могут свободно проезжать перекресток без каких-либо препятствий со стороны рабочих зон или других транспортных средств. Этот тип поведения относится к автомобилям, идущим впереди очереди перед стоп-линией.Следующее поведение применяется к транспортным средствам, которые должны следовать за предыдущими транспортными средствами. Поведение слияния относится к ситуации, когда транспортное средство обходит рабочую зону, чтобы слиться с основным потоком. Распространение происходит после того, как автомобили проезжают через рабочую зону. Он описывает поведение транспортных средств в более широком пространстве за рабочей зоной. Челночное поведение относится к агрессивным транспортным средствам, которые предпочитают развивать более высокую скорость или двигаться вперед.Поведение слияния, поведение рассеивания и поведение при движении — это три типа поведения водителя, которые уникальны для движения на перекрестке с рабочей зоной.
Кроме того, при наличии трансграничной рабочей зоны траектории движения транспортных средств, проезжающих перекресток, будут значительно изменены. Когда светофор становится зеленым, машины, стоящие в очереди за стоп-линией, освобождаются. Однако машины не могут двигаться прямо. Они вынуждены двигаться по кривой, чтобы обойти рабочую зону трансмиссии.Между тем, автомобили с противоположного направления одновременно отпускаются, когда горит зеленый свет. Траектории движения транспортных средств сжимаются в сторону пространства, изначально предназначенного для встречных транспортных средств, из-за наличия рабочей зоны. В конце концов, на пересечении с трансграничной рабочей зоной транспортные средства с двух противоположных направлений сильно взаимодействуют друг с другом. Таким образом, наличие трансграничной рабочей зоны серьезно повлияло на поведение транспортных средств на перекрестке.Следовательно, необходима новая модель, которая может отражать характеристики транспортного потока в зоне трансграничных работ.
3.2. Улучшенная модель социальной силы для трансграничной рабочей зоны
Предлагаемая система социальной силы для транспортных средств в трансграничной рабочей зоне показана на Рисунке 2. В документе предлагаются шесть типов социальной силы для отражения поведения водителя транспортных средств в пересечение с трансмиссионной рабочей зоной: самоуправляемая сила, следящая сила, сила проходимого зазора, сила отталкивания, граничная сила и сила трения.
3.2.1. Self-Driven Force
Когда ведущие машины в очереди начинают движение от стоп-линии, они пытаются разогнаться до желаемой скорости и поддерживать желаемую скорость, чтобы проехать перекресток. Ведущие автомобили переходят на режим свободного вождения. На ведущее транспортное средство воздействует собственная сила, чтобы уловить его характеристики водителя. Самодвижущаяся сила, указывающая на выезд из перекрестка, пропорциональна разнице между фактической и желаемой скоростью и не может превышать максимальное ускорение.Сила может заставить транспортное средство регулировать свою скорость в каждый момент адаптации, чтобы достичь разрешенной максимальной скорости на перекрестке. Уравнение самоуправляемой силы выглядит следующим образом: где обозначает самодвижущуюся силу, обозначает максимальное ускорение транспортного средства i и, соответственно, обозначает желаемую и фактическую скорости транспортного средства i , τ i обозначает время реакции транспортного средства i и обозначает желаемое направление транспортного средства i в момент времени t , которое может быть получено из текущего положения и желаемого положения транспортного средства i и имеет следующее выражение:
3.2.2. Сила следования
Когда транспортное средство вынуждено следовать за предыдущим автомобилем, оно демонстрирует следующее поведение и движется вперед, принимая безопасную скорость. Чтобы отразить характеристику следующего поведения, следующая сила действует на следующее транспортное средство, которое указывает на его предыдущее транспортное средство. В следующей силе, когда скорость следующего транспортного средства меньше безопасной скорости, это заставляет транспортное средство ускоряться; в противном случае автомобиль замедлится. Уравнение следующей силы выглядит следующим образом: где обозначает следующую силу, обозначает стандартный вектор, указывающий от транспортного средства i к его предыдущему транспортному средству, и обозначает безопасную скорость, которую транспортное средство i должно поддерживать с предшествующим транспортным средством на время t , и его можно рассчитать с помощью модели следования автомобилям безопасности Гиппса [24] следующим образом: где b i обозначает максимальное замедление следующего транспортного средства i , b j обозначает максимальное замедление предшествующего транспортного средства j , d s ( t ) обозначает зазор между транспортными средствами i и j и обозначает скорость предыдущего транспортного средства j , тогда t .
3.2.3. Сила проходимого зазора
Как показано на рисунке 3, когда впереди появляется большой зазор, транспортное средство пытается войти в зазор, что происходит под действием силы, называемой силой проходимого зазора. Сила проходимого зазора указывает на центральную точку зазора. В режимах слияния, рассеивания и челночного движения на транспортное средство может воздействовать сила проходимого зазора. Если зазор впереди больше, чем сумма ширины транспортного средства и запаса стороны безопасности (например, на рисунке 3), сила проходимого зазора действует на транспортное средство.Чем больше зазор, тем больше значение силы прохождения зазора. Следует отметить, что если на транспортное средство воздействует сила проходимого зазора, ему необходимо сравнить значения следующей силы и силы проходимого зазора. Если следующая сила больше, чем сила проходимого зазора, транспортное средство будет следовать за этим предшествующим транспортным средством; в противном случае он войдет в еще больший разрыв впереди. Сила проходимого зазора выражается как экспоненциальная функция зазора следующим образом: где обозначает силу проходимого зазора, A p обозначает параметр, d f обозначает ширину испытуемое транспортное средство, ∆ d обозначает безопасное расстояние от испытуемого транспортного средства до бокового транспортного средства, когда испытуемое транспортное средство движется через проходимый зазор, и обозначает направление силы проходимого зазора, то есть стандартный вектор, указывающий спереди от средней точки i исследуемого транспортного средства до середины проходимого промежутка.
3.2.4. Сила отталкивания
Чтобы избежать бокового столкновения транспортного средства с боковыми транспортными средствами, на транспортное средство действует сила, называемая силой отталкивания. Когда расстояние между транспортным средством и его боковым транспортным средством больше, чем действующий прицел, сила отталкивания очень мала. Когда расстояние меньше действующего прицела, сила отталкивания увеличивается очень быстро с уменьшением расстояния для обеспечения безопасности. Двум транспортным средствам не разрешается касаться друг друга, поэтому сила должна быть очень большой, когда расстояние очень мало.Сила отталкивания является функцией бокового расстояния двух соседних транспортных средств и имеет следующее выражение: где обозначает силу отталкивания, A r обозначает параметр, d ij обозначает расстояние сбоку между транспортным средством i и бортовым транспортным средством j , B r обозначает действующий объем социальной отталкивающей силы транспортного средства j , что означает, когда транспортное средство i вторгается в область действия транспортного средства j , сила отталкивания будет генерироваться и обозначает стандартный вектор, указывающий от транспортного средства j к транспортному средству i вбок.
3.2.5. Граничная сила
Точно так же, чтобы избежать столкновения с границей, граничная сила также необходима, и формула выглядит следующим образом: где обозначает граничную силу, A b обозначает параметр, d ib обозначает боковое расстояние от транспортного средства i до границы, а B b обозначает действующий объем граничной силы, что означает, когда расстояние между транспортным средством i и границей составляет менее B b , граничная сила будет действовать на транспортное средство i .обозначает стандартный вектор, указывающий от границы до транспортного средства i вбок.
3.2.6. Сила трения
Чтобы отразить взаимодействие между транспортными средствами с двух противоположных направлений, добавляется сила трения. Направление силы трения противоположно направлению движения транспортных средств. Сила трения вызывает замедление, противоположное направлению движения, в результате чего транспортное средство замедляется. Это также окажет определенное влияние на количество проезжающих автомобилей и среднее время в пути.Сила трения выражается следующим образом: где обозначает граничную силу, A fr обозначает параметр, ∆ d обозначает безопасное расстояние, через которое автомобиль может плавно пройти (ширина зеркала заднего вида и т. Д.) , принимая 1/4 ширины транспортного средства), l ij обозначает продольное расстояние между транспортным средством i и встречным транспортным средством j , d ij обозначает поперечное расстояние двух транспортных средств i и j , обозначает относительную скорость транспортных средств i и j и обозначает стандартный вектор, указывающий от встречного транспортного средства j к транспортному средству i .
Таким образом, объединенная сила, действующая на ведущие транспортные средства, выглядит следующим образом:
Объединенная сила, действующая на другие транспортные средства, выглядит следующим образом:
Модель транспортного потока, предложенная в этом документе, является моделью, основанной на силе, и она отличается от широко используемых моделей слежения за автомобилем или смены полосы движения, поэтому эта модель имеет широкий спектр применения. Модель не только может использоваться для описания регулярного движения без рабочей зоны, но также может использоваться для отражения характеристик нерегулярного движения, таких как неструктурированная дорога, смешанное движение, движение рабочей зоны и аномальные перекрестки.
4. Калибровка и проверка модели
4.1. Сбор данных
Для калибровки и проверки предложенной модели были собраны данные трех трансграничных рабочих зон. Время сбора данных было с 17:30 до 19:30 по будням в Чэнду, провинция Сычуань, Китай. Два БПЛА (беспилотные летательные аппараты) использовались для записи информации о дорожном движении на трех перекрестках. Тем временем были изучены данные о сигналах и геометрии рабочей зоны и перекрестков.У всех трех перекрестков было четыре участка, в то время как на разных перекрестках могло быть разное количество полос подъезда и выезда. Рабочие зоны также имеют разные размеры. Основные данные о геометрии трех перекрестков и рабочих зон см. В Таблице 1. Данные о транспортном потоке показаны в Таблице 2. В Таблице 2 t f обозначает среднее время прохождения ведущего транспортного средства, t o обозначает среднее время прохождения промежуточных транспортных средств, T обозначает период фазы сигнала, обозначает продолжительность фазы сигнала зеленого света, R обозначает продолжительность фазы сигнала красного света, и Y обозначает продолжительность фазы сигнала желтым светом.
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
4.2. Результаты калибровки и проверки
Для калибровки предложенной модели применяется метод, основанный на макроскопических данных трафика. Этот метод получил широкое распространение для калибровки моделей транспортных потоков [5, 10, 15, 25–27]. Метод калибровки заключается в решении задачи нелинейного программирования, в которой U-функция Тиля принимается в качестве целевой функции, параметры модели являются независимыми переменными, а допустимые диапазоны параметров модели являются ограничениями [16, 28–31] (см. Таблица 3).Целевая функция в используемом методе калибровки выглядит следующим образом: где z k обозначает реальное значение переменной оценки для наблюдения k th , обозначает оценочное значение z k и N обозначает общее количество наблюдений.
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
В уравнении (11) переменная оценки 2592 9121
имеет шесть альтернативных вариантов: общее количество автомобилей N т , количество автомобилей N c , среднее время в пути ведущих автомобилей и всех транспортных средств T f и T a , и средние скорости ведущих транспортных средств и всех транспортных средств S f 9059 2 и S a .Во всех пяти собранных наблюдениях четыре из них будут использоваться для калибровки предложенной модели, а оставшееся одно будет использоваться для проверки модели. Генетический алгоритм (GA), встроенный в набор инструментов GA MATLAB, принят для решения проблемы нелинейного программирования [32]. Для получения наилучших результатов функция GA запускается десять раз. В итоге получены оптимальные значения параметров для предложенной модели (см. Таблицу 3).
Для оценки эффективности предложенной модели используются три индекса MOE (мера эффективности): средняя ошибка (me), средняя абсолютная ошибка (mae) и средняя абсолютная относительная ошибка (MARE).Они рассчитываются следующим образом [26, 33]:
Результаты калибровки и проверки показаны в таблице 4. Из таблицы 4 можно заметить, что значения MARE для шести переменных не превышают 0,05. В частности, MAE N c составляет около 2, показывая, что разница между смоделированным номером транспортного средства и реальным номером транспортного средства также очень мала. Все результаты показывают, что предложенная модель имеет высокую производительность при воспроизведении транспортного потока на перекрестке с трансграничной рабочей зоной.
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||
5. Моделирование и анализ результатов
5.1. Настройка моделирования
При моделировании устанавливается пересечение с разводной рабочей зоной, как показано на рисунке 4.Перекресток имеет тот же пейзаж и оформление сигналов, что и Участок 1 в собранных данных. И автомобили, и автобусы включены в моделирование. Первоначальная вероятность генерации данного типа транспортного средства зависит от пропорций типов в полевых данных Зоны 1. Временной шаг моделирования установлен равным 1 секунде. Результаты моделирования содержат как микроскопические, так и макроскопические данные о трафике. Микроскопические данные включают скорость, положение и ускорение транспортных средств на каждом временном шаге. Макроскопические данные взяты из агрегированных результатов микроскопических выходных данных, включая среднее время прохождения, среднюю скорость и скорость потока насыщения.
5.2. Расстояние от нижнего края рабочей зоны до срединного разделителя дороги ()
На рисунке 5 показано изменение скорости и количества проезжаемых транспортных средств в сигнале с вариацией, показанной на рисунке 4. Это можно наблюдать из Рисунок 5 показывает, что при 0 м ≤ <7 м, чем больше расстояние от верхнего края рабочей зоны до срединного разделителя дороги, тем больше площадь проезда. Связь и линейна. Когда ширина левого входа близка или больше, то есть ≥ 7 м, пропускная способность перекрестка близка к нормальному перекрестку.В это время рабочая зона находится на участке дороги, и влиянием рабочей зоны на перекресток можно пренебречь, поэтому она остается неизменной. Кроме того, результат показывает, что средняя скорость проезда транспортных средств увеличивается с шагом. Причина в том, что когда значение увеличивается, для проезда транспортных средств может быть предоставлено больше дорожных ресурсов. Взаимодействие между транспортными средствами и приближающимися к ним транспортными средствами уменьшено, поэтому средняя скорость обгона увеличится.
5.3. Ширина незанятого переулка (
D )В рабочей зоне трансмиссии на Рисунке 6 (a) D обозначает ширину открытой зоны в рабочей зоне. Объем движения и средняя скорость проезда транспортных средств в определенное зеленое время моделируются путем изменения значения D . Как показано на Фигуре 6 (b), из исходного состояния длина рабочей зоны D = 0, то есть нижняя часть, полностью закрыта. Количество подъездных и выездных полос в рабочей зоне — 2, а количество полос движения, не предназначенных для транспортных средств, — 1, поэтому в одном направлении имеется 3 полосы движения.При 0 ≤ D <6,5 м половину дороги занимает рабочая зона. В этой ситуации объем трафика и средняя скорость быстро увеличиваются с шагом D . Когда D ≥ 6,5 м, хотя объем движения и средняя скорость также увеличиваются, когда D становится больше, увеличивающийся уклон меньше, чем в случае 0 ≤ D <6,5 м.
5.4. Доля больших транспортных средств (
P H )На рисунке 7 показана тенденция транспортного потока и средней скорости в случае постепенного увеличения доли крупных транспортных средств.В нашем моделировании значение P H изменяется от 0 до 1. Как показано на рисунке 7, можно заметить, что при 0 ≤ P H <0,55 количество транспортных средств проезжая через перекресток, и их средняя скорость значительно уменьшаются с увеличением количества крупных транспортных средств. Когда P H ≥ 0,55, если доля больших транспортных средств продолжает увеличиваться, уменьшение объема движения больше не является значительным и имеет тенденцию к стабильному.Объем трафика в это время достигает минимального значения. Большие автомобили имеют более низкую скорость и занимают больше места, что приводит к уменьшению средней скорости движения.
5.5. Доля транспортных средств с левым поворотом (
P L )На рисунке 8 показано влияние доли транспортных средств с левым поворотом на транспортный поток на перекрестке с трансграничной рабочей зоной. При моделировании доля транспортных средств с левым поворотом увеличивается от 0 до 0.9 постепенно. Можно заметить, что скорость и количество проезжаемых транспортных средств будут уменьшаться с увеличением доли транспортных средств с левым поворотом. Причина в том, что увеличение количества транспортных средств с левым поворотом усилит взаимодействие сквозного движения и движения с левым поворотом. Кроме того, когда P L меньше 0,6, количество транспортных средств и скорость значительно уменьшаются, а когда P L больше 0,6, тенденция к снижению смягчается.Причина этого явления заключается в том, что транспортные средства с левым поворотом стали основным компонентом транспортного потока, когда P L > 0,6, а увеличение P L уменьшит степень смешения и взаимодействия левого поворота и через автомобили.
5.6. Анализ трехстороннего пересечения
Чтобы проверить применимость предложенной модели в других сценариях, мы выполнили моделирование трехстороннего пересечения с трансграничной рабочей зоной, как показано на Рисунке 9.Параметры, такие как количество полос и ширина полосы движения, принимаются такими же, как и в разделе 5.1.
На рис. 10 показаны результаты моделирования для трехстороннего пересечения с рабочей зоной трансмиссии. Рисунки 10 (a) –10 (d), соответственно, демонстрируют влияние расстояния от нижнего края рабочей зоны до срединного разделителя дороги (), ширины незанятой полосы движения ( D ), доли большие транспортные средства ( P H ) и доля транспортных средств с левым поворотом ( P L ) в транспортном потоке.Можно заметить, что предложенная модель также применима к трехстороннему пересечению с трансграничной рабочей зоной. Модели воздействия вышеупомянутых переменных на транспортный поток во многом аналогичны тем, которые имеет место при пересечении перекрестка, в то время как пороги изменения тенденции различны для двух типов перекрестков, а влияние крупных транспортных средств и транспортных средств с левым поворотом на транспортный поток. не так важны, как пересечение перекрестка.
6. Выводы и дальнейшая работа
Во многих странах на городских магистралях существует большое количество рабочих зон, которые оказывают большое влияние на городское движение.Однако исследования рабочих зон городских артерий очень ограничены, особенно рабочих зон на перекрестках. Основываясь на анализе характеристик транспортного потока в рабочей зоне, мы предлагаем модель, основанную на социальных силах, для определенного типа рабочей зоны, которая охватывает перекресток и сегмент, а именно, трансграничную рабочую зону. Для калибровки и проверки предложенной модели данные трех трансграничных рабочих зон были собраны в Чэнду, Китай. Ниже приведены основные выводы, сделанные в этой статье: (1) Предлагаемая модель может описывать характеристики транспортного потока на перекрестке с трансграничной рабочей зоной с высокой производительностью.Значения MARE для объема трафика, средней скорости и времени прохождения через рабочую зону составляют менее 10%. (2) Когда рабочая зона существует, объем трафика обратно пропорционален расстоянию от нижнего края рабочей зоны. рабочая зона до срединного разделителя дороги. Моделирование показывает, что объем увеличивается по мере увеличения и остается в основном неизменным, когда расстояние превышает половину перекрестка. (3) Для отношения больших транспортных средств и отношения транспортных средств с левым поворотом существует значение P , которое составляет объем трафика становится очевидным уменьшением с приращением P H , когда 0 ≤ P H < P , и объем трафика имеет тенденцию быть стабильным, когда P H ≥ P .(4) Предлагаемая модель также применима к трехстороннему перекрестку с трансграничной рабочей зоной, и влияние нескольких ключевых переменных аналогично влиянию перекрестков.
Однако это исследование также имеет некоторые ограничения. Во-первых, на основе предложенной модели в будущем может быть решена задача оптимизации сигналов для пересечения с трансграничной рабочей зоной, что поможет снизить негативное влияние рабочей зоны на движение перекрестков.