
ГАИ Минска взяла под контроль правила маневрирования и проезда перекрестков
Фото из архива
8 октября, Минск /Корр. БЕЛТА/. В Центральном районе Минска проходят рейды по пресечению нарушений ПДД. Об этом БЕЛТА сообщили в УГАИ ГУВД Мингорисполкома.
Под пристальным вниманием сотрудников ГАИ — правила маневрирования и проезда перекрестков. К слову, с начала года в Центральном районе из-за нарушения правил проезда перекрестков и маневрирования совершено 18 ДТП.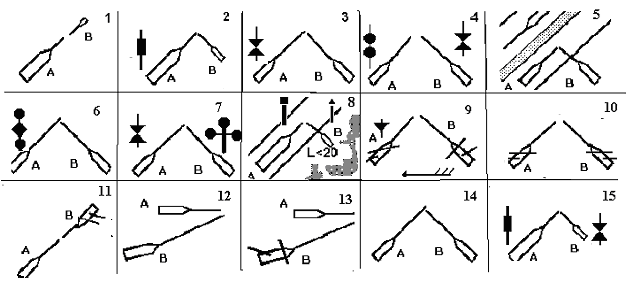
Кроме того, в поле зрения инспекторов дорожной милиции находятся аварийно опасные участки дорог, где, по статистике, водители чаще всего совершают подобного рода нарушения. При этом на особом контроле — физическое состояние автолюбителей и наличие необходимых документов.
«Проезжая регулируемые и нерегулируемые перекрестки, а также совершая различные маневры, четко выполняйте все требования действующего законодательства. При повороте налево обязательно уступайте дорогу всем, кто движется прямо либо поворачивает направо. Обращайте внимание на дорожные знаки, которые обозначают последовательность проезда перекрестков, и следите за сигналами светофоров. При совершении маневра убедитесь, что своими действиями вы не поставите под угрозу жизнь и здоровье других участников дорожного движения», — добавили в ГАИ.-0-
Маневрирование автомобилей
Маневрирование автомобилей
 Одним из основных мероприятий является обязательное выполнение всеми водителями статей Правил дорожного движения, касающихся маневрирования. Точное расположение транспорт-ных средств в пределах ширины своего ряда и исключение резких поворотов оказывает большое влияние на возможность повышения скоростей автомобилей и обе-, спечения безопасности движения. Каждый водитель должен быть уверен, что никто не помешает движению внезапным въездом в его ряд.Никогда, ни при каких обстоятельствах нельзя внезапно менять место расположения автомобиля и выполнять переезд в другой ряд, поворот и разворот без предварительной, не менее чем за 5 с подачи сигналов поворота. Помимо выдерживания прямолинейного движения в течение 5 с после подачи сигнала при самом переезде из ряда в ряд надлежит соблюдать следующие правила: переезд нельзя выполнять резким поворотом, его надо осуществлять с небольшим углом; боковое перемещение автомобиля на 3 — 3,5 м необходимо выполнять на расстоянии, соответствующем не менее половины величины скорости движения автомобиля; при скорости 30 км/ч переезд можно осуществить на расстоянии не менее 15 м, при скорости 50 км/ч — на расстоянии 25 м и т.
Одним из основных мероприятий является обязательное выполнение всеми водителями статей Правил дорожного движения, касающихся маневрирования. Точное расположение транспорт-ных средств в пределах ширины своего ряда и исключение резких поворотов оказывает большое влияние на возможность повышения скоростей автомобилей и обе-, спечения безопасности движения. Каждый водитель должен быть уверен, что никто не помешает движению внезапным въездом в его ряд.Никогда, ни при каких обстоятельствах нельзя внезапно менять место расположения автомобиля и выполнять переезд в другой ряд, поворот и разворот без предварительной, не менее чем за 5 с подачи сигналов поворота. Помимо выдерживания прямолинейного движения в течение 5 с после подачи сигнала при самом переезде из ряда в ряд надлежит соблюдать следующие правила: переезд нельзя выполнять резким поворотом, его надо осуществлять с небольшим углом; боковое перемещение автомобиля на 3 — 3,5 м необходимо выполнять на расстоянии, соответствующем не менее половины величины скорости движения автомобиля; при скорости 30 км/ч переезд можно осуществить на расстоянии не менее 15 м, при скорости 50 км/ч — на расстоянии 25 м и т.
Соблюдение правил перестроения не должно создавать помех и опасностей для движения других транспортных средств в этих рядах. Перед началом выезда в смежный ряд необходимо с помощью зеркала заднего вида убедиться в отсутствии в непосредственной близости транспортного средства, которому такой выезд может помешать. Следует иметь в виду, что если необходимо переехать не в соседний ряд, а во второй или третий ряд, то в каждом из этих рядов нужно также двигаться в прежнем направлении в течение 5 с и только затем, соблюдая указанные правила, переместиться в соседний ряд. Выполняя рекомендуемый порядок манев-рирования, снижать скорости движения не следует, так как такое снижение вызывает задержки в движении других транспортных средств и их водители, чтобы исключить потерю времени, могут начать обгон. В результате возникнет опасная ситуация и, как результат, дорожно-транспортное происшествие. Выполнять правила маневрирования необходимо и перед преднамеренной остановкой, и началом движения автомобиля; в этих случаях также обязательна подача сигналов поворота.
Движение задним ходом требует от водителя повышенного внимания и осторожности. Перед началом движения задним ходом и в местах, где могут находиться дети, нельзя полагаться только лишь на зеркало заднего вида, так как в нем не будет заметен находящийся за автомобилем ребенок. Следует выйти из автомобиля, обойти его вокруг и убедиться в отсутствии помех движению. При маневрировании в ограниченном пространстве или при необходимости ехать с очень малой скоростью, педаль сцепления нужно удерживать в по-ложении неполного включения. Это обеспечит полный контроль над автомобилем и возможность его мгновенной остановки.Одним из наиболее трудно выполнимых и опасных маневров является маневр обгона. Наиболее распространенный вид обгона — обгон с выездом из ряда и возвращением в тот же ряд. По правилам движения такой обгон нерельсовых транспортных средств можно выполнять только с левой стороны. Обгон с точки зрения устойчивости автомобиля представляет опасность, потому что при его выполнении автомобиль дважды описывает кривую с малым радиусом и центром вращения, находящимся то с левой, то с правой стороны.
Для снижения такой опасности водитель должен избегать резких поворотов, стремиться сделать линию выезда на обгон и возвращения в ряд после обгона возможно равномернее и плавнее. Выезжать на обгон рекомендуется, когда между обгоняющим и обгоняемым автомобилями имеется различие в скорости не менее 15 км/ч. Всегда надо стремиться к выполнению маневра обгона в возможно меньшее время. Не следует забывать, что как перед выездом из своего ряда, так и перед возвращением в него после обгона необходимо подавать соответствующие сигналы поворотов.
Обгон с выездом из занимаемого ряда и возвращением в этот ряд можно выполнять лишь тогда, когда все расстояние, необходимое для обгона, хорошо просматривается и исключена возможность появления на пути других транспортных средств или пешеходов.
В случае остановки или снижения скорости движения транспортных средств перед пешеходным переходом на пересечении или в других местах нельзя выполнять обгон, следуя по свободной полосе, так как возможно появление пешеходов, заканчивающих переход проезжей части. Выход пешеходов, как правило, происходит неожиданно из-за стоящих транспортных средств, что не позволяет их своевременно обнаружить.
Правила судоходства для маломерных судов
Как известно, не знание законов не освобождает от ответственности и, выходя на воду, следует соблюдать определенные правила, которые устанавливают единый порядок пользования маломерными судами на водных объектах Российской Федерации.
Маломерным судном считается любое судно длиной не более 20 метров, общее количество людей на котором не должно превышать 12. Исходя из определения выходит, что большинство плавательных средств подходят под определение маломерного судна. Итак, что необходимо знать владельцам маломерных судов? Первое, на что стоит обратить внимание – это регистрация в ГИМС. По существующим законам всё, что весом меньше 200 кг и с мотором меньше 8 кВт (10.88 л.с.), регистрировать не обязательно! Здесь сразу стоит отметить, что все, что не подлежит регистрации не требует и удостоверения на право управления плавсредством.
Для судов обязательных к регистрации существуют общие правила нанесения бортового регистрационного номера. По действующим правилам бортовой номер должен состоять из: 2-х букв, 4-х цифр, обозначения региона РФ, буквенного указания страны и изображения флага. Для наглядности обратите внимание на схематический рисунок.
Стоит также отметить, что бортовой номер наносится на каждый борт судна в одну строчку, таким образом, чтобы ее геометрическая середина была на удалена от форштевня на расстояние не менее, чем 1/4 габаритной длины судна. При этом высота букв должна быть не меньше 15 см, ширина составляет 10 см, а толщина контура допускается в пределах 1,5-2 см.
При этом высота букв должна быть не меньше 15 см, ширина составляет 10 см, а толщина контура допускается в пределах 1,5-2 см.
В тех случаях, когда конструкция судна не позволяет соблюсти вышеуказанные требования, порядок размещения номера регламентируется регистрационным органом.
С регистрацией все понятно, теперь давайте рассмотрим общие обязанности управляющего маломерным судном. Итак, следуя правилам судоходства, судоводитель обязан:
— Знать и выполнять требования установленных государством законов и правил судоходства.
— Проверять техническое состояние судна перед каждым выходом на воду.
— Обеспечивать безопасность, находящихся в лодке пассажиров.
— Обеспечивать наличие всех необходимых документов на судно и обязательного снаряжения.
— Выполнять требования уполномоченных представителей надзорных органов.
Что же необходимо иметь на борту помимо необходимых документов? Для того чтобы разобраться с необходимым снаряжением предлагаем воспользоваться специальной таблицей.
Теперь давайте рассмотрим, в каких случаях запрещается управлять маломерным судном. Итак, при использовании маломерного судна запрещается управлять им в случае:
— Не зарегистрированным в установленном порядке.
— Без удостоверения на право управления маломерным судном.
— Не прошедшим технического освидетельствования.
— Не несущим бортовых номеров.
Первые 4 пункта касаются плавстредств обязательных для регистрации! Далее запрещается управлять судном в случае:
— переоборудованным без соответствующего разрешения;
— с нарушением норм загрузки, пассажировместимости, ограничений по району и условиям плавания;
— в состоянии опьянения;
Также необходимо знать, что запрещается:
— передавать управление судном лицу, не имеющему права управления или находящемуся в состоянии опьянения;
— превышать установленные скоростные ограничения;
— нарушать правила маневрирования, подачи звуковых сигналов, несения бортовых огней и знаков;
— наносить повреждения гидротехническим сооружениям, техническим средствам, знакам судоходной и навигационной обстановки;
— заходить в постоянно или временно закрытые для плавания районы без специального разрешения или преднамеренно останавливаться в запрещенных местах;
— в целях обеспечения безопасности людей заходить под мотором или парусом и маневрировать на акваториях пляжей, купален, других мест купания и массового отдыха населения на водных объектах;
— перевозить на судне детей дошкольного возраста без сопровождения взрослых;
— швартоваться, останавливаться, становиться на якорь у плавучих навигационных знаков, грузовых и пассажирских причалов, пирсов, дебаркадеров, доков (плавдоков) и под мостами, маневрировать в непосредственной близости от транспортных и технических судов морского и речного флота, создавать своими действиями помехи судоходству;
— устанавливать моторы на гребные лодки при отсутствии соответствующей записи в судовом билете;
— использовать суда в целях браконьерства и других противоправных действий;
— осуществлять пересадку людей с одного судна на другое во время движения;
— осуществлять заправку топливом без соблюдения соответствующих мер пожарной безопасности;
— выходить на судовой ход при ограниченной (менее 1 км) видимости;
— осуществлять расхождение и обгон судов в местах расположения аварийно-ремонтных заграждений, переправ и работающих земснарядов, а также в пролетах мостов и подходных каналах, при подходе к шлюзам;
— двигаться в тумане или в других неблагоприятных метеоусловиях, когда из-за отсутствия видимости невозможна ориентировка;
— нарушать правила, обеспечивающие безопасность плавания, а также безопасность пассажиров при посадке на суда, в пути следования и при высадке их с судов.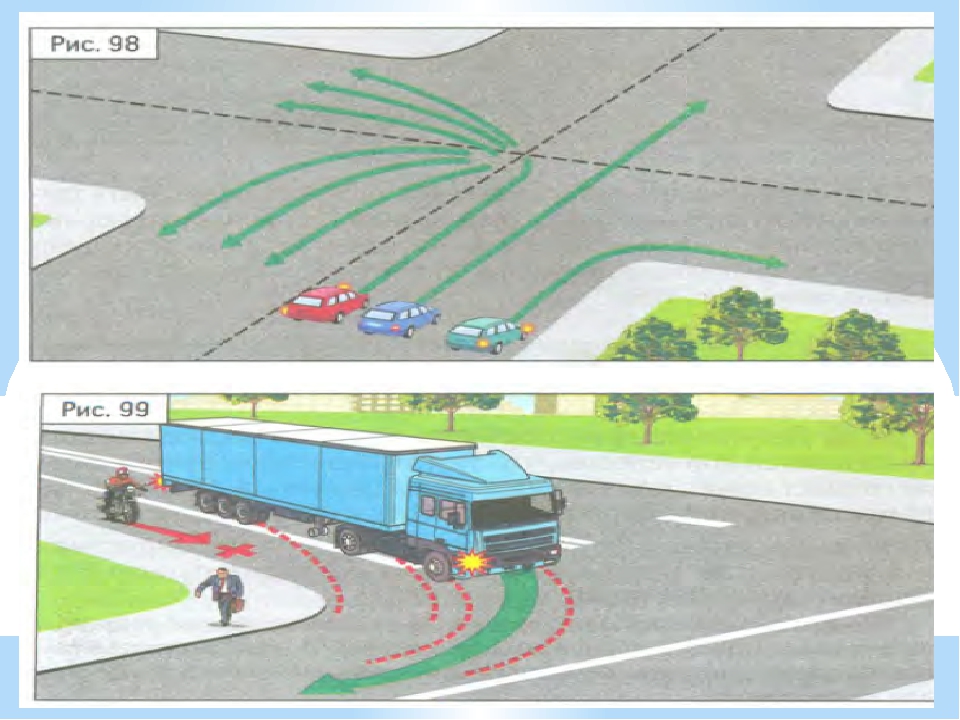
— пересекать судном полосы движения или всего судового хода на расстоянии менее 1 км от приближающихся судов без согласования взаимных действий, при этом во всех случаях пересечение должно производиться под углом, близким к прямому;
— маневрировать и останавливаться вблизи идущих или стоящих других судов, земснарядов, плавучих кранов и т.д. и в промежутках между ними;
— останавливаться и становиться на якорь в пределах судового хода, а также у плавучих навигационных знаков;
Также стоит перечислить неисправности, при которых запрещается пользоваться маломерными судами:
— сквозные пробоины в корпусе судна независимо от их местонахождения;
— разгерметизация отсеков и (или) воздушных ящиков, равно как и их отсутствие;
— отсутствие предусмотренных конструкцией деталей крепления рулевого устройства или повреждение его составных частей, или необеспечение надежности его работы;
— наличие утечек топлива, вибрации, отсутствие или неисправность глушителя, повреждение системы дистанционного управления двигателем, необеспечение надежного включения (выключения) реверс-редуктора, неисправность блокировки запуска двигателя при включенном реверсе;
— несоответствие нормам комплектации и оборудования судна, указанным в судовом билете;
— отсутствие, поломка и неправильная работа сигнально-отличительных огней.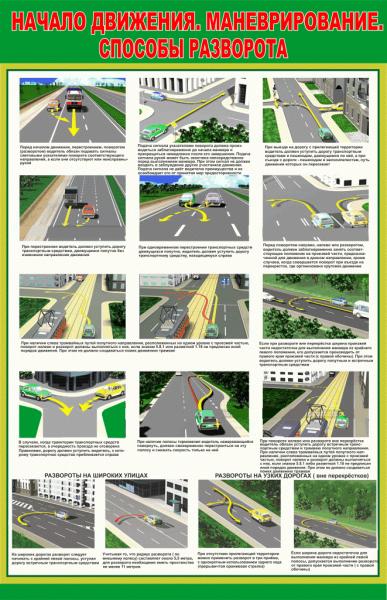
Помните, что выход судна на воду в обход установленных запретов и невыполнение установленных законодательством правил влечет наложение административных штрафов и строгие санкции, в том числе предусматривающие лишение судоводительских прав!
§ 4. Международно-правовые стандарты маневрирования судов. Морские катастрофы
§ 4. Международно-правовые стандарты маневрирования судов
Приближаясь друг к другу, совершая совместные плавания, проходя через проливы, каналы, оказавшись в условиях ограниченной видимости, суда должны руководствоваться специально разработанными МППСС-72, которые содержат целый свод четких указаний поведения судов в различных ситуациях, в частности правила маневрирования. Если суда идут прямо друг на друга, то каждое из них должно отвернуть вправо. Когда суда идут пересекающимися курсами, то судно, которое обнаружило другое судно справа по носу, должно уступить ему дорогу (отвернуть в сторону, остановить машину или дать ход назад), в то время как судно, которому уступают дорогу, обязано идти, не меняя курса и скорости. Если быстроходное судно обгоняет какое-либо другое судно, то оно обязано сторониться с пути обгоняемого судна и не мешать ему идти своим путем. Во всех случаях, когда судно начинает маневрировать с целью избежания столкновения с другим судном, оно должно действовать таким образом, чтобы его маневры были отчетливо видны и понятны другому судну. Иначе говоря, изменение скорости должно быть существенным, например с полного хода на малый ход или даже остановку машин и задний ход. Изменение курса должно происходить сразу не менее чем на 20–25°, и ни в коем случае не следует прибегать к методу последовательных небольших изменений курса (на 2–5°), ибо такие изменения не будут сразу обнаружены и не покажут действительных намерений судна, что может привести к взаимным ошибкам расходящихся судов и к развитию опасной ситуации.
Если быстроходное судно обгоняет какое-либо другое судно, то оно обязано сторониться с пути обгоняемого судна и не мешать ему идти своим путем. Во всех случаях, когда судно начинает маневрировать с целью избежания столкновения с другим судном, оно должно действовать таким образом, чтобы его маневры были отчетливо видны и понятны другому судну. Иначе говоря, изменение скорости должно быть существенным, например с полного хода на малый ход или даже остановку машин и задний ход. Изменение курса должно происходить сразу не менее чем на 20–25°, и ни в коем случае не следует прибегать к методу последовательных небольших изменений курса (на 2–5°), ибо такие изменения не будут сразу обнаружены и не покажут действительных намерений судна, что может привести к взаимным ошибкам расходящихся судов и к развитию опасной ситуации.
МППСС-72 предусматривают также специальные звуковые и световые сигналы для указания маневра: один короткий звук – я изменяю свой курс вправо, два коротких звука – я изменяю свой курс влево, три коротких звука – мои машины работают на задний ход и т. д. В ночное время суда несут различные цветные огни (белые, красные, зеленые, синие, желтые, оранжевые) для указания направления движения, своих размеров и рода своей работы (прокладка подводного кабеля, буксировка, рыбный промысел), а также своего технического состояния и возможностей маневрирования (потеря хода или управления, посадка на мель и проч.).
д. В ночное время суда несут различные цветные огни (белые, красные, зеленые, синие, желтые, оранжевые) для указания направления движения, своих размеров и рода своей работы (прокладка подводного кабеля, буксировка, рыбный промысел), а также своего технического состояния и возможностей маневрирования (потеря хода или управления, посадка на мель и проч.).
Правила маневрирования предусмотрены также в ряде других международных и национальных правовых актов. Например, ст. 2.1–2.29 Правил совместного плавания и промысла судов флота рыбной промышленности СССР[190], Общие правила морских торговых и рыбных портов Союза ССР, утвержденные Минморфлотом и Минрыбхозом СССР от 23 ноября 1983 г.[191], Правила расхождения судов с морскими дноуглубительными снарядами и с судами, занятыми специальными работами[192], Особые случаи расхождения советских судов гражданских ведомств с кораблями ВМФ СССР[193] и ряд других.
Несмотря на тщательную регламентированность всех маневров судов, статистика аварийности показывает, что ежегодно каждое 15-е морское судно становится участником столкновения. На реках и озерах участником столкновения является каждое 4-е из аварийных судов[194]. Исследуя причины столкновений, Институт морской навигации Франции опубликовал в 1979 г. аналитический отчет, для составления которого были использованы данные французских служб мореплавания, а также 20 зарубежных периодических изданий об аварийности за период с 1960 по 1978 г. При этом были рассмотрены 2307 столкновений крупных судов и 21 054 столкновения средних и мелких судов. В итоге было установлено, что 90 % столкновений происходят вследствие ошибок судоводителей и нарушения ими правил маневрирования, а 10 % – из-за гидрометеорологических факторов[195].
На реках и озерах участником столкновения является каждое 4-е из аварийных судов[194]. Исследуя причины столкновений, Институт морской навигации Франции опубликовал в 1979 г. аналитический отчет, для составления которого были использованы данные французских служб мореплавания, а также 20 зарубежных периодических изданий об аварийности за период с 1960 по 1978 г. При этом были рассмотрены 2307 столкновений крупных судов и 21 054 столкновения средних и мелких судов. В итоге было установлено, что 90 % столкновений происходят вследствие ошибок судоводителей и нарушения ими правил маневрирования, а 10 % – из-за гидрометеорологических факторов[195].
В исследовании японского Института мореплавания отмечалось, что в 1969–1971 гг. в водах Японии произошло 24 000 столкновений судов, в том числе 3238 столкновений судов валовой вместимостью свыше 100 рег. т. Убытки от столкновений, случившихся только в Токийской бухте в 1966–1974 гг. (529 столкновений), превысили 16 млрд иен[196]. При этом исследование показало, что из-за нарушения правил маневрирования происходит около 85 % столкновений.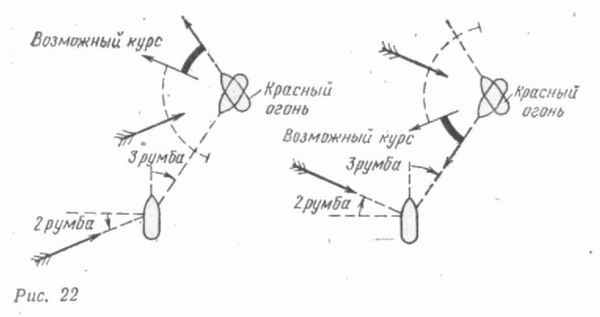 На долю 350 тыс. японских моторных рыболовных судов, 97 % которых ведут промысел непосредственно у берегов Японии, приходится 71,3 % от общего числа столкновений[197]. Гибель рыбаков при столкновении судов играет не последнюю роль в том, что, как подсчитали зарубежные специалисты, смертность среди рыбаков в 20 раз выше, чем в среднем на морском транспорте, и в 5 раз выше, чем у шахтеров. Например, в 1968 г. в результате столкновений погибли вместе с экипажами рыболовные суда «Росс Кливленд», «Ст. Романус», «Кингстон Перидот», «Фукуда мару», «Кайо мару 5», «Сидзи мару» и многие другие[198]. Исследование причин нескольких десятков столкновений автомобильных паромов, во время которых погибло 499 человек, показало, что 95 % столкновений произошло на встречных. курсах когда правила маневрирования нарушаются наиболее часто. По мнению зарубежных специалистов, эта закономерность проявляется во всех случаях столкновений судов[199].
На долю 350 тыс. японских моторных рыболовных судов, 97 % которых ведут промысел непосредственно у берегов Японии, приходится 71,3 % от общего числа столкновений[197]. Гибель рыбаков при столкновении судов играет не последнюю роль в том, что, как подсчитали зарубежные специалисты, смертность среди рыбаков в 20 раз выше, чем в среднем на морском транспорте, и в 5 раз выше, чем у шахтеров. Например, в 1968 г. в результате столкновений погибли вместе с экипажами рыболовные суда «Росс Кливленд», «Ст. Романус», «Кингстон Перидот», «Фукуда мару», «Кайо мару 5», «Сидзи мару» и многие другие[198]. Исследование причин нескольких десятков столкновений автомобильных паромов, во время которых погибло 499 человек, показало, что 95 % столкновений произошло на встречных. курсах когда правила маневрирования нарушаются наиболее часто. По мнению зарубежных специалистов, эта закономерность проявляется во всех случаях столкновений судов[199].
7 декабря 1978 г. английский рыболовный траулер «Акасия Вуд» вел промысел в Северном море. Погода была хорошей, и вахтенный штурман легко обнаружил на расстоянии 5 миль огни судна, видимые справа по носу. По правилам маневрирования траулер был обязан уступить дорогу, и штурман приказал рулевому постепенно изменить курс на 20° вправо: быстрый поворот был опасен, так как с левого борта был спущен трал и при резком изменении курса вправо стальные тросы (ваера), к которым крепится трал, могли намотаться на винт. После завершения поворота огни встречного судна были видны уже слева по носу, и стало очевидно, что угроза столкновения миновала. Однако когда расстояние до встречного судна сократилось до 500–600 метров, оно внезапно стало поворачивать влево, точно намереваясь протаранить траулер. Вахтенный штурман успел остановить машины и дал команду повернуть руль влево, чтобы возможное столкновение произошло под более острым углом, что гораздо менее опасно, чем удар под прямым углом одного судна в борт другого. Неизвестное крупнотоннажное судно нанесло скользящий удар в левый борт траулера, причинив ему тяжелые повреждения, а затем, не снижая скорости, ушло.
Погода была хорошей, и вахтенный штурман легко обнаружил на расстоянии 5 миль огни судна, видимые справа по носу. По правилам маневрирования траулер был обязан уступить дорогу, и штурман приказал рулевому постепенно изменить курс на 20° вправо: быстрый поворот был опасен, так как с левого борта был спущен трал и при резком изменении курса вправо стальные тросы (ваера), к которым крепится трал, могли намотаться на винт. После завершения поворота огни встречного судна были видны уже слева по носу, и стало очевидно, что угроза столкновения миновала. Однако когда расстояние до встречного судна сократилось до 500–600 метров, оно внезапно стало поворачивать влево, точно намереваясь протаранить траулер. Вахтенный штурман успел остановить машины и дал команду повернуть руль влево, чтобы возможное столкновение произошло под более острым углом, что гораздо менее опасно, чем удар под прямым углом одного судна в борт другого. Неизвестное крупнотоннажное судно нанесло скользящий удар в левый борт траулера, причинив ему тяжелые повреждения, а затем, не снижая скорости, ушло. Капитан траулера приказал подать сигнал бедствия, так как судно быстро заполнялось водой, и успел коротко сообщить береговой радиостанции об обстоятельствах столкновения, после чего связь внезапно прервалась. Судно утонуло вместе с экипажем.
Капитан траулера приказал подать сигнал бедствия, так как судно быстро заполнялось водой, и успел коротко сообщить береговой радиостанции об обстоятельствах столкновения, после чего связь внезапно прервалась. Судно утонуло вместе с экипажем.
Почти аналогичный случай произошел с танкером «Омоним» (1137 peг. т), который 24 декабря 1978 г. столкнулся в Мессинском проливе вблизи Италии с неизвестным грузовым судном, грубо нарушившим правила маневрирования. После столкновения неизвестное судно последовало дальше, не оказав помощи танкеру, который оказался в бедственном положении. Почти сразу после подачи сигнала бедствия на танкере вспыхнул пожар и раздался мощный взрыв. После краткого сообщения на береговую радиостанцию о состоянии судна и причинах аварии связь с ним прекратилась. Судно утонуло вместе с экипажем[200].
Особую опасность для самих сталкивающихся судов и для окружающей обстановки представляют случаи, когда на борту находится какое-либо опасное вещество: нефть, сжиженный газ, взрывчатые или легковоспламеняющиеся жидкости и твердые составы, а также ядовитые, инфекционные, радиоактивные и прочие вещества. Потопление столкнувшегося судна с таким грузом причиняет, как правило, большой ущерб окружающей морской среде и объектам на море и побережье.
Потопление столкнувшегося судна с таким грузом причиняет, как правило, большой ущерб окружающей морской среде и объектам на море и побережье.
У берегов Тобаго в 1978 г. столкнулись в результате неправильного маневрирования танкер «Атлантик Эмпресс» (275 тыс. peг. т) и танкер «Эйджин Кэптэйн» (200 тыс. т нефти на борту). В результате столкновения танкер «Атлантик Эмпресс» взорвался и затонул. Общий убыток от гибели одного танкера и повреждения другого, а также от загрязнения нефтью превысил 90 млн долл. Поскольку основным виновником столкновения был признан танкер «Эйджин Кэптэйн», то на его владельцев и возложили основную часть ответственности за ущерб. В ноябре 1978 г. у берегов Испании взорвался после столкновения танкер «Андрос Патриа», сам же и виновный в столкновении. Вместе с судном погибли 39 моряков. В море вылилось 50 000 т нефти. Общий убыток превысил 50 млн долл. В январе 1979 г. после столкновения загорелся, а затем взорвался и затонул танкер «Мастер Мишель». 0 В море вылилось 5600 т нефти. Общий убыток превысил 25 млн долл. В феврале 1979 г. вследствие неправильного маневрирования столкнулся со встречным судном танкер «Энержи Детерминэйшен» (153 479 peг. т). Столкновение произошло на полном ходу, в условиях хорошей видимости недалеко от берегов Омана. Возникший в момент столкновения пожар постепенно захватил половину судна. Ввиду угрозы взрывов капитан приказал экипажу покинуть судно. Не успели спасательные плоты отойти на расстояние 300 м, как на танкере прозвучали один за другим три мощных взрыва. Танкер разломился на части и почти мгновенно затонул. Убыток от аварии составил 58 млн долл.[201]
Общий убыток превысил 25 млн долл. В феврале 1979 г. вследствие неправильного маневрирования столкнулся со встречным судном танкер «Энержи Детерминэйшен» (153 479 peг. т). Столкновение произошло на полном ходу, в условиях хорошей видимости недалеко от берегов Омана. Возникший в момент столкновения пожар постепенно захватил половину судна. Ввиду угрозы взрывов капитан приказал экипажу покинуть судно. Не успели спасательные плоты отойти на расстояние 300 м, как на танкере прозвучали один за другим три мощных взрыва. Танкер разломился на части и почти мгновенно затонул. Убыток от аварии составил 58 млн долл.[201]
Столкнувшееся судно – жертва неправильного маневрирования – может погибнуть не сразу, а лишь через какое-то время, но, как правило, вследствие повреждений, полученных при столкновении.
В октябре 1970 г. в Бискайском заливе столкнулись на пересекающихся курсах западногерманский танкер «Дортмунд» и суданский танкер «Эрковит». В результате столкновения «Дортмунд» особенно не пострадал, в то время как «Эрковит» получил ряд серьезных повреждений и был взят на буксир западногерманским спасательным судном «Ротесэнд». Во время буксировки усилилось поступление воды через временно заделанные пробоины танкера «Эрковит». Во избежание потопления судна на глубоком месте буксир «Ротесэнд» повел его вдоль каменистого берега в районах относительно небольших глубин. Однако довести аварийное судно до безопасного порта так и не удалось. Течением и внезапно усилившимся ветром танкер был снесен на рифы у побережья Испании. Из пробоин, полученных при ударе о рифы, началась утечка нефти. Все попытки спасателей ликвидировать течь и снять судно с камней закончились неудачей. Штормом танкер был разбит о камни и погиб. От загрязнения нефтью пострадали рыбные запасы и приморские пляжи. Убыток, причиненный Испании, превысил 10 млн ф. ст. Правительство Испании от имени всех пострадавших предъявило иск виновникам катастрофы – владельцам танкера «Дортмунд», ибо по их вине произошло столкновение. Что касается спасателей, то суд отказал им в вознаграждении, поскольку им не удалось спасти аварийный танкер[202].
Во время буксировки усилилось поступление воды через временно заделанные пробоины танкера «Эрковит». Во избежание потопления судна на глубоком месте буксир «Ротесэнд» повел его вдоль каменистого берега в районах относительно небольших глубин. Однако довести аварийное судно до безопасного порта так и не удалось. Течением и внезапно усилившимся ветром танкер был снесен на рифы у побережья Испании. Из пробоин, полученных при ударе о рифы, началась утечка нефти. Все попытки спасателей ликвидировать течь и снять судно с камней закончились неудачей. Штормом танкер был разбит о камни и погиб. От загрязнения нефтью пострадали рыбные запасы и приморские пляжи. Убыток, причиненный Испании, превысил 10 млн ф. ст. Правительство Испании от имени всех пострадавших предъявило иск виновникам катастрофы – владельцам танкера «Дортмунд», ибо по их вине произошло столкновение. Что касается спасателей, то суд отказал им в вознаграждении, поскольку им не удалось спасти аварийный танкер[202].
На практике возможны и такие последствия столкновения судов, произошедшего вследствие нарушения правил маневрирования, когда предотвратить катастрофу не могут практически никакие усилия спасателей.
9 ноября 1974 г. японский танкер «Йюйо мару № 10», груженный 58 000 м3 пропана, бутана и нефти, столкнулся вблизи Токийской бухты с либерийским танкером «Пасифик Айрес», в результате чего «Пасифик Айрес» через 40 минут после столкновения затонул. Экипаж успел покинуть судно на спасательных плотах. Второй участник столкновения – «Йюйо мару № 10» также загорелся в момент столкновения. Группа спасательных буксиров в течение 10 дней пыталась ликвидировать пожары и предотвратить взрывы, которые периодически сотрясали судно. Однако их усилия не дали должных результатов, хотя им и удалось предотвратить растекание нефти по бухте. После того как судно полностью выгорело, оно все еще держалось на плаву, и властями Токио было решено отвести его в открытое море и потопить, ибо фирмы, занимающиеся разделкой списанных судов на металлолом, отказались от танкера. Военный буксир отвел танкер на расстояние 60 миль в открытое море, где 4 истребителя, 4 фрегата, 4 противолодочных корабля и подводная лодка выпустили по нему в общей сложности 857 снарядов, 12 ракет, 4 торпеды и 18 глубинных бомб, и лишь после этого танкер медленно скрылся под водой[203].
Данный текст является ознакомительным фрагментом.
Продолжение на ЛитРесАрхангельск | ГИБДД: соблюдайте очередность проезда на перекрестках, правила маневрирования и обгона
За пятницу и выходные дни, с 14 по 16 мая, на дорогах Архангельской области зарегистрировано пять дорожно-транспортных происшествий, в которых шесть человек получили травмы. При надзоре за дорожным движением сотрудники ГИБДД выявили 1 296 нарушений ПДД по области. За управление транспортным средством в нетрезвом состоянии в регионе задержаны 37 водителей.
14 мая в Плесецком районе в 13:40 на 17-м километре автодороги Дениславье – Североонежск – Собр произошла авария с участием мотоциклиста. Предварительно установлено, что мужчина 1988 года рождения, управляя не зарегистрированным в установленном порядке мотоциклом ЗИД и не имея соответствующих прав, в процессе обгона выехал на встречную полосу, где столкнулся с автомобилем ВАЗ-21150. Мотоциклист с телесными повреждениями госпитализирован.
Предварительно установлено, что мужчина 1988 года рождения, управляя не зарегистрированным в установленном порядке мотоциклом ЗИД и не имея соответствующих прав, в процессе обгона выехал на встречную полосу, где столкнулся с автомобилем ВАЗ-21150. Мотоциклист с телесными повреждениями госпитализирован.
В Архангельске в 15:45 напротив дома 56 по улице Дачной столкнулись КамАЗ и мотоцикл «Ямаха». По предварительной информации, водитель КамАЗа при выезде с прилегающей территории не предоставил преимущество и допустил столкновение с мотоциклом, который двигался по главной дороге. В результате ДТП пассажир мотоцикла, мужчина 1988 года рождения, с телесными повреждениями госпитализирован.
Госавтоинспекция напоминает водителям автомобилей правила, которые помогут снизить риск столкновения с мототранспортом:
- Данные виды транспорта менее заметны на дороге и одновременно более динамичны, чем автомобиль. Мотоцикл быстро разгоняется, больше склонен к опрокидыванию.
 При появлении в поле зрения скутеров или мотоциклов водителю необходимо избегать лишних маневров, не создавать умышленных помех в движении.
При появлении в поле зрения скутеров или мотоциклов водителю необходимо избегать лишних маневров, не создавать умышленных помех в движении. - Обязательно пользуйтесь зеркалами заднего вида.
- Соблюдайте рядность. Мотоциклист волен в пределах своей полосы совершать любые маневры: объезжать люки, менять положение для лучшего просмотра ситуации на дороге, он может быть совершенно неготовым к тому, что его опережают в его же полосе. Как и водители автомобилей, мотоциклист рассчитывает, что его опередят по соседней полосе, поэтому ваше появление может стать неожиданным.
- Если подбирающийся через пробку мотоциклист не успел добраться к цели до того, как поток начал движение, разрешите встать ему в вашу полосу: если движение в междурядье среди стоящих авто относительно безопасно, то при движущемся потоке – очень опасно.
 При появлении в поле зрения скутеров или мотоциклов водителю необходимо избегать лишних маневров, не создавать умышленных помех в движении.
При появлении в поле зрения скутеров или мотоциклов водителю необходимо избегать лишних маневров, не создавать умышленных помех в движении. Взаимовежливость на дороге и неукоснительное соблюдение ПДД позволит избежать аварийных ситуаций!
Водителям мототранспорта также необходимо соблюдать правила:
- Не забывайте об обязательном использовании мотошлема.
- Помните, что мотоцикл и скутер являются транспортными средствами – поэтому при движении на них необходимо соблюдать рядность, хотя об этом зачастую забывают любители проскочить пробку.
- При движении в светлое время суток должен быть включен ближний свет фар.
- Особое внимание и осторожность необходимы в местах скопления пешеходов: на перекрестках, площадях, у школ, клубов, кинотеатров, остановок общественного транспорта, при подъезде к пешеходным переходам, в местах, где играют дети.
- Соблюдайте очередность проезда на перекрестках, правила маневрирования и обгона.
- Не превышайте установленной скорости движения.

Управление ГИБДД УМВД России по Архангельской области
Ещё новости о событии:
В Сольвычегодске мотоциклист врезался в лесовоз
По предварительной информации региональной диспетчерской службы, водитель мотоцикла с коляской не заметил камаз, который двигался по главной дороге, и въехал в его заднее колесо.
16:52 18.05.2021 ГТРК Поморье — Архангельск
В Котласском районе произошло столкновение мотоцикла с КАМАЗом
В Сольвычегодске Котласского района в понедельник, 17 мая, в 17:30 на пересечении неравнозначных дорог ул.
13:03 18.05.2021 ИА Двина Сегодня — Архангельск
ГИБДД: соблюдайте очередность проезда на перекрестках, правила маневрирования и обгона
За пятницу и выходные дни, с 14 по 16 мая, на дорогах Архангельской области зарегистрировано пять дорожно-транспортных происшествий, в которых шесть человек получили травмы.
17:58 17.05.2021 Пресс-центр Правительства — Архангельск
Новости соседних регионов по теме:
Мотоциклист пострадал в ДТП на пересечении дублера Волгоградки и Волжского бульвара
ДТП с участием автомобиля и мотоцикла произошло на пересечении дублера Волгоградского проспекта и Волжского бульвара.
17:40 19.05.2021 Район Текстильщики ЮВАО Москвы — Москва
Нельзя не учитывать особенности мототранспорта
С приходом весны на дорогах возрастает число людей, передвигающихся на двухколесном транспорте.
18:21 19.05.2021 ГИБДД — Псков
Нельзя не учитывать особенности мототранспорта
С приходом весны на дорогах возрастает число людей, передвигающихся на двухколесном транспорте.
18:10 19.05.2021 УМВД Псковской области — Псков
19 мая госавтоинспекторы проверят соблюдение правил ПДД рязанскими мотоциклистами
В среду, 19 мая, госавтоинспекторы анонсировали очередной рейд на рязанских дорогах.
15:55 19.05.2021 ИА СОРОКА — Рязань
В Заречном автоинспекторы проверили мотоциклы
С наступлением летнего сезона на дорогах появляются мотоциклисты. В целях предупреждения дорожно-транспортных происшествий с участием водителей мототранспорта сотрудники ГИБДД провели профилактические мероприятия «Мотоцикл».
14:54 19.05.2021 Администрация г. Заречный — Заречный
Более 120 ДТП зарегистрировали в Мытищах за неделю
© Пресс-служба администрации Мытищ
За минувшую неделю в городском округе Мытищи зарегистрировано 117 дорожно-транспортных происшествий с материальным ущербом и 2 ДТП с пострадавшими,
12:43 19.05.2021 MytischiRIAMO.Ru — Мытищи
Во Владимире в ДТП погиб мотоциклист
Мужчина за рулем «Хонды» выехал на перекресток на запрещающий сигнал светофора
Во Владимире вечером 18 мая произошло ДТП с участием легкового автомобиля и мотоцикла.
12:29 19.05.2021 ИА ПроВладимир — Владимир
Водитель BMW насмерть сбил мотоциклиста в Автозаводском районе Нижнего Новгорода
Фото: Нижний Новгород |БЕЗ ЦЕНЗУРЫ| / vk.com Водитель автомобиля не пострадал
Смертельное ДТП произошло в Автозаводском районе Нижнего Новгорода.
12:16 19.05.2021 Нижегородская правда — Нижний Новгород
В пик мотосезона Госавтоинспекция Новосибирской области призывает участников дорожного движения соблюдать меры безопасности
С наступлением благоприятной погоды на дорогах появляются мотоциклисты, велосипедисты, а также водители, управляющие так называемыми «средствами индивидуальной мобильности».
15:15 19.05.2021 УГИБДД УВД по Новосибирской обл. — Новосибирск
В Томске участок дороги на ул. Сибирской закроют для движения автомобилей на две недели
Одна из полос дороги на улице Сибирской в Томске будет закрыта для движения автомобилей на две недели.
15:50 19.05.2021 ГТРК Томск — Томск
В Костроме мотоциклист пострадал в ДТП с Мерседесом
автор изображения ГОЛОСОВАНИЕ за самого АКТИВНОГО РЕБЕНКА. ЖМИ СЮДА!!!
Во вторник вечером на Кинешемском шоссе в районе дома 41 столкнулись автомобиль Мерседес и мотоцикл Ямаха — сообщает региональная ГИБДД.
11:28 19.05.2021 K1News.Ru — Кострома
Мотоциклист погиб при столкновении с иномаркой в Автозаводском районе
По предварительной информации, виновником аварии стал водитель автомобиля.
10:30 19.05.2021 Время Н — Нижний Новгород
Госавтоинспекция подвела итоги рейдовых мероприятий «Мототранспорт»
В целях стабилизации дорожной обстановки и принятия мер по снижению уровня аварийности среди водителей и пассажиров мотоциклов, мопедов и скутеров на территории Киржачского района был проведено рейдовое мероприятие «Мототранспорт».
10:12 19.05.2021 Администрация города Киржач — Киржач
В Кисловодске мотоциклист без прав попал в реанимацию после аварии
Инцидент произошёл 18 мая на улице Катыхина в городе-курорте. Водитель мотоцикла потерял управление, съехал с дороги и врезался в дерево.
09:54 19.05.2021 ИА Победа 26 — Ставрополь
Мотоциклист-бесправник врезался в дерево в Кисловодске
Фото: УГИБДД по Ставропольскому краю
Мужчина получил тяжёлые травмы.
Автоинспекторы Кисловодска устанавливают обстоятельства ДТП с мотоциклом, произошедшего накануне, 18 мая.
09:52 19.05.2021 Телеканал СвоёТВ — Ставрополь
В Татищеве юного байкера госпитализировали после ДТП с «Приорой»
Водитель отечественного автомобиля допустил столкновение с мотоциклом
Фото: Региональная Госавтоинспекция
В поселке Татищево Саратовской области произошла авария с участием мотоциклиста и водителя «ВАЗ-217030» («Приора»).
09:50 19.05.2021 Четвертая Власть — Саратов
В Кургане пьяный водитель въехал в мотоцикл на перекрёстке
Мотоциклист получил телесные повреждения
Вчера в 19:20 у дома № 38 на улице Карбышева в посёлке Рябково произошло ДТП, сообщает УГИБДД УМВД России по Курганской области.
09:30 19.05.2021 Курган и курганцы — Курган
В Инте не имеющий прав беспечный ездок опрокинулся на мотоцикле
Фото УГИБДД МВД по Коми
В Инте в результате ДТП пострадал мотоциклист, не имеющий водительских прав.
10:21 19.05.2021 ИА Комиинформ — Сыктывкар
В посёлке Квиток мотоциклист врезался в КАМАЗ и оказался в больнице
18 мая около половины четвёртого дня в посёлке Квиток Тайшетского района произошло ДТП.
10:50 19.05.2021 ИА Тайшет24 — Тайшет
Уходил дворами: брянец на Иж-Планета устроил гонки с полицией
Нетрезвый мотоциклист оказался без прав, но с 14 штрафами ГИБДД и судимостью за смерть по неосторожности.
17:43 18.05.2021 БрянскНОВОСТИ.RU — Брянск
БЕЗОПАСНЫЙ РАЗВОРОТ, ПРАВИЛА ОБГОНА, ОСТАНОВКА И СТОЯНКА НА УКЛОН
Маневрирование – важнейшая тема для любого начинающего водителя, поскольку от того, насколько правильно вы будете выполнять маневры, зависит ваша безопасность. В этой статье мы подробно разберем тему маневрирования: безопасный разворот, правила обгона, остановки и стоянки на уклонах. И так, начнем…
Сдавая экзамен по вождению, важно правильно садиться и выходить из автомобиля, иначе можно завалить экзамен. Хоть КоАП и не предусматривает за неправильную посадку и высадку из автомобиля штрафов, от этого зависит ваша безопасность.
1)Если вы садитесь в автомобиль, стоящий на обочине или у тротуара, то обходить авто нужно спереди, иначе не увидите приближающуюся опасность.
2)Если вы высаживаетесь из автомобиля, стоящего на обочине или у тротуара, то наоборот, вы должны обойти авто сзади, чтобы вовремя заметить опасность. 1. БЕЗОПАСНЫЙ РАЗВОРОТ С ИСПОЛЬЗОВАНИЕМ ПРИЛЕГАЮЩЕЙ ТЕРРИТОРИИ Когда вы уже станете полноправным водителем, то сможете разворачиваться как угодно, однако на экзамене нужно это сделать максимально безопасным способом, иначе могут засчитать ошибку. К тому же, данный вопрос вам будет задан и на теоретическом экзамене в ГИБДД.
И так, чтобы совершить безопасный разворот, используя прилегающую территорию справа, к примеру, двор, нужно заехать в него задним ходом, и затем уже завершить разворот и повернуть налево. Если вы заедите во двор передом, то со всех сторон вас будет подстерегать опасность, поскольку придется выезжать задним ходом.
Если прилегающая территория (двор) слева, то делать нужно все наоборот.
2. ПРОХОЖДЕНИЕ КРИВОЛИНЕЙНОГО УЧАСТКА ДОРОГИ
В случае поворота дороги направо, водителю следует занять крайнее левое положение на своей половине проезжей части, и траектория движения на повороте будет максимально «выпрямлена».
Помните, что если у траектории движения отсутствует кривизна, то и центробежной силы, способной опрокинуть или снести авто, тоже нет.
При повороте дороги налево, вам сначала необходимо максимально прижаться вправо, а выходя из поворота, задать траекторию, чтобы она не отличалась от прямой. Таким образом, вы максимально «выпрямите» кривизну дороги.
3. ОБГОН Обгон является самым опасным и сложным маневром, поскольку вы выезжаете на встречную полосу. До начала обгона водитель просчитывает путь таким образом, чтобы успеть после завершения обгона занять свою полосу и не создать помех водителям встречного и обгоняемого автомобилей.
Ваша задача – занять такое расположение, чтобы водитель обгоняемого авто постоянно видел вас в зеркало заднего вида и был в курсе ваших намерений. Если вы будете соблюдать безопасную дистанцию, вам будет прекрасно видна встречная полоса, и водитель обгоняемого авто будет хорошо видеть вас в зеркало заднего вида. Также, при неудачной попытке обгона, вы сможете вернуться назад на свою полосу.
4. ОСТАНОВКА И СТОЯНКА НА УКЛОНАХ
Главная задача водителя при остановке и стоянке – принятие мер по исключению самопроизвольного движения автомобиля, о чем говорится в разделе 12 ПДД. Однако какие меры должны быть предприняты водителем, чтобы авто не начало самопроизвольно двигаться, там не уточняется. Попробуем разобраться.
И так, вы остановились или встали на стоянку на уклоне дороги. Первое, что вы должны сделать – затянуть ручной тормоз. Далее, покидая автомобиль, вы должны включить первую передачу (если авто с механической трансмиссией). Это послужит еще одним ручным тормозом, поскольку исключит вращение колес, которые будут связаны с неподвижным коленчатым валом двигателя. В случае, если авто с автоматической трансмиссией, ручка селектора ставится в положение «Р».
Однако и этих мер порой бывает недостаточно, и порой авто умудряются «удрать» от своих хозяев и наделать бед, даже с включенной первой передачей и ручником.
Чтобы избежать этого, водители прибегают еще одному приему – правильно выворачивают направляющие колеса автомобиля. Если имеется бордюр, передние колеса должны быть уперты в него. Если бордюр отсутствует, то выворачивайте колеса за пределы проезжей части. Если авто и покатится, то хотя бы не наделает бед.
Новость со ссылкой на:http://www.avtogai.ru/osnovy-bezopasnogo-manevrirovaniya.html
33 CFR § 83.34 — Сигналы маневрирования и предупреждения (Правило 34). | CFR | Закон США
§ 83.34 Сигналы маневрирования и предупреждения (Правило 34).
(a) Когда суда с механическими двигателями находятся в зоне видимости друг друга и встречаются или пересекаются на расстоянии не более полумили друг от друга, каждое судно на ходу при маневрировании в соответствии с разрешением или требованиями настоящих Правил:
(i) Указывает на этот маневр следующими сигналами своего свистка:
(1) Один короткий звук, означающий «Я намерен оставить вас по левому борту»;
(2) Два коротких звука означают: «Я намерен оставить вас по правому борту»; а также
(3) Три коротких звука означают «Я работаю на заднем ходу».
(ii) Услышав один или два звуковых сигнала друг друга, должен, если они согласны, подать один и тот же свисток и предпринять шаги, необходимые для обеспечения безопасного паса. Если, однако, по какой-либо причине судно сомневается в безопасности предлагаемого маневра, оно должно подать сигнал, указанный в пункте (d) этого Правила, и каждое судно должно предпринять соответствующие меры предосторожности до тех пор, пока не будет достигнуто соглашение о безопасном проходе.
(b) Судно может дополнять свистки, предписанные в пункте (а) этого Правила, световыми сигналами:
(i) Эти сигналы должны иметь следующее значение:
(1) Одна вспышка означает «Я намерен оставить вас по левому борту»;
(2) Две вспышки означают «Я намерен оставить вас по правому борту»;
(3) Три мигания означают «Я работаю на заднем ходу»;
(ii) Продолжительность каждой вспышки должна составлять около 1 секунды; а также
(iii) Огонь, используемый для этого сигнала, должен, если он установлен, быть одним круговым белым или желтым огнем, видимым на минимальном расстоянии 2 мили, синхронизированным со свистком, и должен соответствовать положениям Приложения I к настоящим Правилам. Правила (33 CFR часть 84).
(c) Когда вы видите друг друга:
(i) Судно с механическим двигателем, намеревающееся обгонять другое судно с механическим двигателем, должно указать свое намерение следующими сигналами в свой свисток:
(1) Один короткий звук, означающий «Я намерен обогнать вас по правому борту»;
(2) Два коротких звука означают «Я намерен настигнуть вас по левому борту»; а также
(ii) Судно с механическим двигателем, которое собирается обгонять, должно, по договоренности, подать аналогичный звуковой сигнал.В случае сомнений она должна подать сигнал, предписанный параграфом (d) этого Правила.
(d) Когда находящиеся на виду друг у друга суда приближаются друг к другу и по какой-либо причине одно из судов не понимает намерений или действий другого или сомневается в том, что одно из них принимает достаточные меры для предотвращения столкновения. сомнительное судно должно немедленно указать на такое сомнение, дав по крайней мере пять коротких и быстрых сигналов по свистку. Такой сигнал может быть дополнен световым сигналом не менее пяти коротких и быстрых вспышек.
(e) Судно, приближающееся к излучине или к участку канала или фарватера, где другие суда могут быть закрыты промежуточным препятствием, должно подать один продолжительный звук. На этот сигнал следует ответить продолжительным звуком любого приближающегося судна, которое может быть в пределах слышимости вокруг поворота или позади препятствия.
(f) Если на судне установлены свистки на расстоянии более 100 метров, для подачи сигналов маневрирования и предупреждения должен использоваться только один свисток.
(g) Когда судно с механическим двигателем выходит из дока или причала, оно должно подать один продолжительный звук.
(h) Судно, которое достигает соглашения с другим судном в ситуации лобового столкновения, перехода или обгона, например, используя радиотелефон, как предписано Законом о радиотелефонной связи между мостиками судов (85 Стат. 164; 33 USC 1201 et seq.), Не обязан подавать свистки, предписанные этим Правилом, но может это делать. Если соглашение не достигнуто, то свистки должны передаваться своевременно и имеют преимущественную силу.
[USCG-2012-0102, 79 FR 37912, 2 июля 2014 г., с поправками, внесенными USCG-2015-0433, 80 FR 44280, 27 июля 2015 г .; USCG-2017-1002, 83 FR 3274, 24 января 2018 г.]46 CFR § 131.990 — Маневренные характеристики. | CFR | Закон США
§ 131.990 Маневренные характеристики.
Этот раздел применяется к OSV не менее 6000 GT ITC (500 GRT, если GT ITC не назначен).
(a) Следующая информация о маневрировании должна быть на видном месте в рулевой рубке в информационном бюллетене:
(1) Для полной и половинной скорости — диаграмма окружности поворота на левый и правый борт, которая показывает время и расстояние движения вперед и назад, необходимое для изменения курса на 90 градусов с максимальным углом поворота руля и настройками постоянной мощности.
(2) Время и расстояние до остановки судна на полной и половинной скорости при сохранении приблизительно начального курса с минимальным применением руля направления.
(3) Для каждого судна с фиксированным гребным винтом таблица оборотов вала в минуту для представительного диапазона скоростей.
(4) Для каждого судна с гребным винтом регулируемого шага, таблицей настроек управления или репрезентативным диапазоном скоростей.
(5) Для каждого судна, которое оборудовано вспомогательным устройством для маневрирования, таким как носовое подруливающее устройство, таблица скоростей судна, при которых вспомогательное устройство эффективно маневрирует.
(b) Информация о маневрировании должна предоставляться в условиях нормальной нагрузки и нормальной освещенности с нормальным дифферентом для конкретных условий загрузки, при условии, что следующее:
(1) Спокойная погода — ветер 10 узлов и менее, спокойное море.
(2) Нет тока.
(3) Глубоководные условия — глубина воды в два или более раза превышает осадку судна.
(4) Чистый корпус.
(c) Внизу информационного бюллетеня должно быть указано следующее:
(1) Предупреждение, реакция [НАЗВАНИЕ СУДНА] может отличаться от приведенного выше, если изменяется любое из следующих условий, на которых основана информация о маневрировании:
(i) Спокойная погода — ветер 10 узлов и менее, спокойное море.
(ii) Нет тока.
(iii) Глубоководные условия — глубина воды в два раза превышает осадку судна или более.
(iv) Чистый корпус.
(v) Промежуточные сквозняки или необычная отделка.
(d) Информация в информационном бюллетене должна быть:
(1) Проверено через 6 месяцев после ввода судна в эксплуатацию; или
(2) Изменено через 6 месяцев после ввода судна в эксплуатацию и проверено в течение 3 месяцев после этого.
(e) Информация, содержащаяся в фактологическом бюллетене, может быть получена от:
(1) Наблюдения за пробной поездкой;
(2) Модельные испытания;
(3) Аналитические расчеты;
(4) Моделирование;
(5) Данные получены с другого судна аналогичной формы корпуса, мощности, руля и гребного винта; или
(6) Любая комбинация вышеперечисленного.
(f) Точность информации в информационном бюллетене должна быть на уровне, сопоставимом с уровнем, достигаемым с помощью обычного судового навигационного оборудования.
(g) Требования к информации для информационных бюллетеней для специализированных судов, таких как полупогружные и другие суда необычной конструкции, будут уточняться в каждом конкретном случае.
33 U.S.C. 2034 — гл. 2034
Просмотреть метаданные§2034. Сигналы маневрирования и предупреждения (Правило 34) (a) Сигналы свистка
Когда суда с механическими двигателями находятся в зоне видимости друг друга и встречаются или пересекают друг друга на расстоянии не более полумили, каждое судно на ходу, при маневрировании разрешено или требуется этими Правилами:
(i) должен обозначить этот маневр следующими сигналами в свой свисток: один короткий звук, означающий «Я намерен оставить вас на своем левом борту»; два коротких звука означают: «Я намерен оставить вас по правому борту»; и три коротких звука означают: «Я работаю на заднем ходу».
(ii) услышав один или два звуковых сигнала друг друга, должен, если они согласны, подать один и тот же свисток и предпринять шаги, необходимые для обеспечения безопасного паса. Если, однако, по какой-либо причине судно сомневается в безопасности предлагаемого маневра, оно должно подать сигнал опасности, указанный в пункте (d) этого Правила, и каждое судно должно принимать соответствующие меры предосторожности до тех пор, пока не будет достигнуто соглашение о безопасном проходе.
(b) Световые сигналыСудно может дополнять свистки, предписанные в пункте (а) этого Правила, световыми сигналами:
(i) Эти сигналы должны иметь следующее значение: одна вспышка означает «Я намерен оставлю тебя на моем левом борту »; две вспышки означают: «Я намерен оставить вас по правому борту»; три вспышки означают «Я работаю на заднем ходу»;
(ii) Продолжительность каждой вспышки должна составлять около 1 секунды; и
(iii) огонь, используемый для этого сигнала, должен, если он установлен, быть одним круговым белым или желтым огнем, видимым на минимальном расстоянии 2 мили, синхронизированным со свистком, и должен соответствовать положениям Приложения I. к настоящим Правилам.
(c) Ситуации обгонаКогда вы видите друг друга:
(i) судно с механическим двигателем, намеревающееся обогнать другое судно с механическим двигателем, должно указать свое намерение следующими сигналами в свой свисток: один короткий звук в означают «Я намерен обогнать вас по правому борту»; два коротких звука означают: «Я намерен настигнуть вас по левому борту»; и
(ii) судно с механическим двигателем, которое собирается обгонять, должно, если есть согласие, подать аналогичный звуковой сигнал.В случае сомнений она должна подать сигнал опасности, предписанный в параграфе (d).
(d) Сомнения или непонимание сигналовКогда суда, находящиеся на виду друг у друга, приближаются друг к другу и по какой-либо причине, либо судно не понимает намерений или действий другого, либо сомневается в том, предпринимаются ли достаточные действия. принятое другим судном во избежание столкновения, сомнительное судно должно немедленно указать на такое сомнение, дав по крайней мере пять коротких и быстрых сигналов по свистку.Этот сигнал может быть дополнен световым сигналом не менее пяти коротких и быстрых вспышек.
(e) Суда, находящиеся в районах с ограниченной видимостью из-за промежуточных препятствийСудно, приближающееся к излучине или к участку канала или фарватера, где другие суда могут быть закрыты препятствием, должно подать один продолжительный звук. На этот сигнал следует ответить продолжительным звуком любого приближающегося судна, которое может быть в пределах слышимости вокруг поворота или позади препятствия.
(f) Использование только одного свистка на суднеЕсли на судне установлены свистки на расстоянии более 100 метров, только один свисток должен использоваться для подачи сигналов маневрирования и предупреждения.
(g) Суда с механическим двигателем, выходящие из дока или причалаКогда судно с механическим двигателем выходит из дока или причала, оно должно подать один продолжительный звук.
(h) Соглашение между судами, использующими радиотелефонСудно, которое достигает соглашения с другим судном в ситуации лобового столкновения, перехода или обгона, например, используя радиотелефон, как предписано судном мост-мостик Закон о радиотелефонной связи (85 стат.164; 33 U.S.C. 1201 et seq.), Не обязан подавать свистки, предписанные этим правилом 1, но может это делать. Если соглашение не достигнуто, то свистки должны передаваться своевременно и имеют преимущественную силу.
(Pub. L. 96–591, §2, 24 декабря 1980 г., 94 Stat. 3430; Pub. L. 104–324, раздел VII, §701 (6), 19 октября 1996 г., 110 Stat 3933.)
Ссылки в текстеНастоящие Правила, указанные в п. (а) — это Правила внутреннего судоходства, которые относятся к этому подразделу.
Приложение I к настоящим Правилам, указанное в п. (b) (iii), устанавливается Секретарем в соответствии с разделом 2071 настоящего раздела.
Закон о судовой радиотелефонной связи с мостика, упомянутый в п. (h), это Pub. L. 92–63, 4 августа 1971 г., 85 Stat. 164 с поправками, который в целом относится к главе 24 (§1201 и последующие) этого заголовка. Для полной отнесения этого Закона к Кодексу см. Примечание к краткому заголовку, приведенное в разделе 1201 этого заголовка и таблицах.
КодификацияРаздел был введен в действие как часть раздела 2 Pub.L. 96–591, который ввел в действие Правила внутреннего судоходства, составляющие этот подраздел.
Поправки1996 — Пар. (час). Паб. L. 104–324 с изменениями в п. (h) в целом. До внесения изменений в п. (h) читать следующим образом: «Судно, которое достигает соглашения с другим судном в ситуации встречи, перехода или обгона, используя радиотелефон, как предписано Законом о радиотелефонной связи от моста к мостику (85 Stat. 165; 33 USC 1207). , не обязан подавать свистки, предписанные этим Правилом, но может это делать.Если соглашение не достигнуто, то свистки должны передаваться своевременно и имеют преимущественную силу ».
Раздел, упоминаемый в других разделахЭтот раздел упоминается в разделах 2009, 2014 этого заголовка.
1 Так в оригинале. Наверное, следует писать с заглавной буквы.
Маневрирование во время медленного полета
Справочник по полетам по приборам, вихревые генераторы- Каждый раз, когда самолет летит со скоростью, близкой к скорости сваливания или в зоне обратной команды, например, при конечном заходе на посадку для нормальной посадки, начальной части ухода на второй круг или маневрировании на медленном полете, он выполняет так называемый медленный полет. -скоростной полет
- Если самолет весит 4000 фунтов, подъемная сила, создаваемая самолетом, должна составлять 4000 фунтов
- Когда подъемная сила меньше 4000 фунтов, самолет больше не может выдерживать горизонтальный полет и, следовательно, снижается
- Во время преднамеренного снижения это важный фактор, который используется для полного управления самолетом
- Однако, поскольку подъемная сила требуется во время полета на низкой скорости и характеризуется большими углами атаки, закрылки или другие устройства большой подъемной силы необходимы либо для изменения изгиба профиля, либо для задержки разделения граничных уровней
- Обычные и разрезные закрылки чаще всего используются для изменения развала аэродинамического профиля
- Следует отметить, что при применении закрылков самолет заглохнет при меньшем угле атаки
- Базовое сваливание крыла под углом 18 ° без закрылков, но с выпущенными закрылками (до положения CL-MAX) новый угол атаки, при котором самолет остановится, составляет 15 °
- Однако значение подъемной силы (закрылки, выпущенные в положение CL-MAX) дает больше подъемной силы, чем подъемная сила при 18 ° на базовом крыле
- Задержка отрыва пограничного слоя — еще один способ увеличить CL-MAX
- Используются несколько методов (например, всасывание и использование продувочного пограничного слоя), но наиболее распространенным устройством, используемым на легких самолетах авиации общего назначения, является генератор вихрей.
- Небольшие полосы металла, размещенные вдоль крыла (обычно перед рулями), создают турбулентность
- Турбулентность, в свою очередь, смешивает высокоэнергетический воздух снаружи пограничного слоя с воздухом пограничного слоя
- Эффект аналогичен эффекту других устройств пограничного слоя [Рисунок 2-12]
- Область обратной команды — это режим полета, при котором требования к сопротивлению и тяге меняются на противоположные.
- Иногда это называют «обратной стороной кривой мощности» или «позади кривой мощности»
- При полете в зоне действия команды заднего хода требуется больше мощности из-за снижения скорости
- Если мощность не поддерживается, проскальзывание может быть коварным, приводя к сваливанию
- Это способствует более высокому уровню аварийности в терминальной среде
- Большинство маленьких самолетов поддерживают скорость значительно выше 1.3 раза ВСО по приборам
- Самолет со скоростью сваливания 50 узлов (VSO) имеет нормальную скорость захода на посадку 65 узлов
- Однако этот же самолет может выдерживать 90 узлов (1,8 VSO) на последнем участке захода на посадку по приборам.
- Шасси, скорее всего, будут выдвинуты в начале снижения до минимальной высоты снижения или при пересечении глиссады системой посадки по приборам.
- Пилот также может выбрать промежуточную установку закрылков для этого этапа захода на посадку.
- Самолет на этой скорости имеет хорошую положительную стабильность скорости, как показано точкой A на Рисунке 2-10
- Полет в этом режиме позволяет пилоту делать небольшие изменения тангажа без изменения настроек мощности и принимать незначительные изменения скорости, зная, что, когда шаг возвращается к исходной настройке, скорость возвращается к исходной настройке
- Это снижает нагрузку на пилота
- Самолеты обычно замедляются до нормальной посадочной скорости на конечном этапе захода на посадку непосредственно перед посадкой
- При снижении скорости до 65 узлов (1.3 VSO) самолет будет приближаться к точке C
- [Рисунок 2-10] На этом этапе точный контроль шага и мощности становится более важным для поддержания правильной скорости
- Координация шага и мощности необходима, поскольку стабильность скорости относительно нейтральна, поскольку скорость имеет тенденцию оставаться на новом значении и не возвращаться к исходной настройке
- Помимо необходимости более точного контроля воздушной скорости, пилот обычно изменяет конфигурацию самолета, выпуская посадочные закрылки
- Это изменение конфигурации означает, что пилот должен предупреждать о нежелательных изменениях тангажа на малой высоте
- Если позволить замедлить несколько узлов, самолет может войти в область обратной команды
- В этот момент самолет может развить небезопасную скорость снижения и продолжать терять скорость, если пилот не предпримет срочных корректирующих действий.
- Правильный шаг и координация мощности критически важны в этой области из-за нестабильности скорости и тенденции к увеличению отклонения от желаемой скорости
- Пилоты больших самолетов с более высокой скоростью сваливания могут обнаружить, что скорость, которую они поддерживают при заходе на посадку по приборам, близка к 1.3 VSO, поместив их около точки C [Рис. 2-10] все время, пока самолет находится на конечном участке захода на посадку
- В этом случае необходимо точное регулирование скорости на всем протяжении подхода
- Может потребоваться временно выбрать чрезмерную или недостаточную тягу по отношению к заданной настройке тяги, чтобы быстро скорректировать отклонения воздушной скорости
- Например, пилот приближается к приборам на скорости 1,3 VSO, скорости около L / DMAX, и знает, что определенная настройка мощности поддерживает эту скорость
- Самолет замедляет скорость на несколько узлов ниже желаемой из-за небольшого снижения мощности
- Пилот немного увеличивает мощность, и самолет начинает разгоняться, но медленно
- Поскольку самолет все еще находится в «плоской части» кривой лобового сопротивления, это небольшое увеличение мощности не вызовет быстрого возврата к желаемой скорости.
- Пилоту может потребоваться увеличить мощность выше, чем обычно требуется для поддержания новой скорости, позволить самолету разогнаться, а затем уменьшить мощность до настройки, которая поддерживает желаемую скорость
- По определению, термин «полет с минимальной контролируемой воздушной скоростью» (MCA) означает скорость, при которой любое дальнейшее увеличение угла атаки или коэффициента нагрузки, или снижение мощности вызовет немедленное сваливание.
- Минимальная управляемая воздушная скорость (V MC ) — это воздушная скорость, ниже которой управление воздушным судном не может быть сохранено в случае отказа критического двигателя
- MCA зависит от веса брутто, факторов нагрузки и существующей высоты над уровнем моря
ПРЕДУПРЕЖДЕНИЕ:
Все процедуры ОБЩИЕ.
Всегда летайте в соответствии с процедурами Руководства пилота,
соблюдая все соответствующие Стандартные рабочие процедуры (СОП)
- Выполнить расчистку витков
- Уменьшите мощность и отрегулируйте тангаж для поддержания высоты
- Обрезать по необходимости
- Сохраните товарную позицию
- Поскольку элементы управления будут менее эффективными, потребуется больше дифферента для сброса противодавления.
- При выполнении «грязной» конфигурации выполните следующее:
- Ниже V LO , выдвинуть шасси
- Ниже V FE , полностью выдвиньте закрылки
- При необходимости переведите рычаг управления воздушным винтом в крайнее положение (высокие обороты).
- Когда примерно на 5 узлов выше целевой скорости (MCA), увеличьте мощность для поддержания высоты.
- Обрезать по необходимости
- Помните нестабильность скорости
- Поворачивайте, поднимайтесь и спускайтесь в соответствии с указаниями
- Не забывайте, что органы управления должны быть плавными, поскольку аэродинамические поверхности менее эффективны на более низких скоростях
- Для плавного и непрерывного восстановления, увеличения мощности до полной, регулировки тангажа для поддержания воздушной скорости и постоянного поддержания курса
- При выполнении «грязной» конфигурации выполните следующее:
- По мере увеличения воздушной скорости поднимайте закрылки постепенно, до 10 °:
- Слишком резкое втягивание закрылков приведет к резкой потере подъемной силы и, возможно, к срыву
- По мере увеличения воздушной скорости, но ниже V LO поднимите шасси
- На или выше Vx убрать закрылки до 0 °
- По мере увеличения воздушной скорости поднимайте закрылки постепенно, до 10 °:
- По достижении крейсерской скорости установить крейсерскую мощность
- При необходимости отрегулировать дифферент
- Полный контрольный список круиза
- Отсутствие надлежащей очистки территории
- Недостаточное давление в подъемнике из-за снижения мощности, приводящее к потере высоты
- Чрезмерное давление заднего подъемника при снижении мощности, приводящее к подъему с последующим быстрым снижением воздушной скорости и «кашлем»
- Недостаточная компенсация резкого рыскания при поворотах
- Фиксация на указателе скорости
- Неспособность предвидеть изменения подъемной силы при выпуске или втягивании закрылков
- Неадекватное управление питанием
- Неспособность должным образом разделить внимание между управлением самолетом и ориентацией
- Чтобы определить, что заявитель демонстрирует удовлетворительные знания, управление рисками и навыки, связанные с маневрированием во время медленного полета
- Примечание. См. Приложение 6: Безопасность полетов и Приложение 7: Воздушные суда, оборудование и эксплуатационные требования и ограничения
- Ссылки: FAA-H-8083-2, FAA-H-8083-3; POH / AFM
- Аэродинамика, связанная с медленным полетом в различных конфигурациях самолета, включая взаимосвязь между углом атаки, воздушной скоростью, коэффициентом нагрузки, настройкой мощности, массой и центром тяжести самолета, положением самолета и эффектами рыскания.
- Непреднамеренный медленный полет и полет с предупреждением о сваливании, что может привести к потере управления.
- Диапазон и ограничения индикаторов предупреждения об остановке (например,г., буфет самолета, клаксон и т. д.)
- Несоблюдение скоординированного полета
- Влияние элементов окружающей среды на летно-технические характеристики самолета (например, турбулентность, микропорывы и высокая высота над уровнем моря)
- Опасности столкновения, включая воздушные суда, местность, препятствия и провода.
- Отвлекающие факторы, потеря ситуационной осведомленности или неправильное управление задачами.
- Очистить область
- Выберите высоту входа, которая позволит выполнить задачу не ниже 1500 футов над уровнем моря (ASEL, ASES) или 3000 футов над уровнем моря (AMEL, AMES).
- Установите и поддерживайте воздушную скорость, при которой любое дальнейшее увеличение угла атаки, увеличение коэффициента нагрузки или уменьшение мощности приведет к предупреждению о сваливании (например.г., буфет самолета, клаксон и т. д.)
- Выполнять скоординированный горизонтальный полет, повороты, набор высоты и снижение с самолетом, настроенным в соответствии с указаниями оценщика, без предупреждения о сваливании (например, бортовой сигнал самолета, звуковой сигнал сваливания и т. Д.)
- Поддерживайте указанную высоту ± 100 футов; заданный курс, ± 10 °; скорость полета + 10 / -0 узлов; и заданный угол крена, ± 10 °
Кандидат должен продемонстрировать понимание:
Кандидат демонстрирует способность выявлять, оценивать и снижать риски, включая:
Поступающий демонстрирует способность:
- Хотя есть несколько причин практиковать медленный полет, начинающий пилот найдет наибольшее воплощение в полете в рамках схемы движения
- Некоторые маневры полета требуют полета с минимальной контролируемой скоростью, например Chandelle и Lazy Eights
- Обычное обучение и оценка, требующие включения и удержания звукового сигнала предупреждения об остановке
- Это больше не так и нежелательно, так как это требует (поощряет) преднамеренное игнорирование предупреждения Поэтому в Стандартах сертификации пилотов
- четко сформулирована задача «установить и поддерживать такую воздушную скорость, при которой любое дальнейшее увеличение угла атаки, увеличение коэффициента нагрузки или уменьшение мощности приведет к предупреждению о сваливании» (например.г., авиационный буфет, клаксон и др.) »
- Координация является ключевым моментом, так как несогласованный полет, близкий к скорости сваливания, может вызвать вращение.
- Попробуйте потренироваться в маневрах на авиасимуляторе, чтобы познакомиться с маневрами или избавиться от ржавчины
- Все еще что-то ищете? Продолжить поиск:
Корректировка полномасштабных маневровых испытаний и моделирование движения на основе реальных морских и погодных условий
Датчики(Базель).2020 июл; 20 (14): 3963.
Guoyou Shi
2 Институт совместных инновационных исследований автономных судов, Даляньский морской университет, Далянь 116026, Китай; moc.361@gstiminella
2 Совместный инновационный научно-исследовательский институт автономных судов, Даляньский морской университет, Далянь 116026, Китай; moc.361@gstiminellaПоступило 21.06.2020; Принято 12 июля 2020 г.
Лицензиат MDPI, Базель, Швейцария. Эта статья представляет собой статью в открытом доступе, распространяемую в соответствии с условиями лицензии Creative Commons Attribution (CC BY) (http: // creativecommons.org / licenses / by / 4.0 /). Эту статью цитировали в других статьях в PMC.Abstract
Предлагается новый метод коррекции маневрирования судна, направленный на низкую точность и сложную проверку моделирования маневра, вызванного ветром, волнами и морскими течениями на поверхности моря. Силы ветрового и волнового дрейфа рассчитываются по данным измерений. На основе гипотезы устойчивого поворота и алгоритма поиска паттернов были решены параметры настройки ветра, волн и течений на поверхности моря, были рассчитаны расстояния дрейфа и скорости дрейфа ветра, волн и течений на поверхности моря, а также данные трека и скорости эксперимента. были исправлены.По результатам испытаний определены гидродинамические коэффициенты и создана модель маневренного движения корабля. Результаты показывают, что скорректированные данные были более точными, чем данные каротажа, гидродинамические коэффициенты могут быть полностью определены, точность прогноза наступления и тактического диаметра составила 93% и 97%, а прогноз модели маневрирования был точным. Численные примеры подтверждают метод коррекции и натурную модель маневрирования. Угол поворота и тактический диаметр соответствуют стандартам маневренности судов Международной морской организации (IMO).
Ключевые слова: полномасштабное маневрирование , корректировка испытаний, моделирование движения, фактические морские и погодные условия, эталонная модель и машина опорных векторов (RM-SVM), стандарты маневренности корабля
1. Введение
Во время морских испытаний, движения корабля включают маневрирование и дрейф. Дрейф вызывается ветром и волнами на море, и корабль показывает медленные, длительные периоды движения и даже устойчивое движение [1]. Чтобы получить точные данные испытаний, их исправление является важным шагом при моделировании маневрирования судна.Начиная с 1978 года, Абковиц использовал Esso Osaka для ходовых испытаний, определил математическую модель маневрирования корабля и подтвердил осуществимость метода идентификационного моделирования [2]. Недавно Zhang et al. [3], Bai et al. [4] и Kim et al. [5] также использовали полномасштабные судовые данные для моделирования идентификации. В литературе [2, 3, 4] следует отметить, что бревно также устанавливалось под водой на корпусе корабля, который подвержен воздействию поперечного потока, в дополнение к тому, что на корабль действуют силы дрейфа ветер и волна.Kim et al. [5] использовали метод, описанный в литературе [6,7,8], для корректировки данных морских испытаний и идентифицировали модель маневрирования корабля, но не учитывали влияние ветра и волн. Используя данные испытаний для создания модели, следует выбрать испытания с малым влиянием; в противном случае необходимо устранить влияние ветра и волн.
Разъяснения Международной морской организации (IMO) по стандартам маневрирования [6], руководящие принципы Общества морских архитекторов и морских инженеров (SNAME) [7] и инструкции Международной конференции по буксирным танкам (ITTC) [8] предложили методы коррекции радиуса поворота. тестовое задание; В противном случае ходовые испытания должны проводиться в глубоких, спокойных и неограниченных водах.Правила IMO, SNAME и ITTC решили текущее направление на основе гипотезы однородного тока и гипотезы устойчивого поворота [6,7,8]. Однако влияние ветровой нагрузки на балластные суда, контейнеровозы и суда ро-ро больше, чем на танкеры с полной загрузкой и балкеры. Кроме того, коэффициент ветра изменяется в зависимости от направления ветра, указывая на то, что ветровая нагрузка судна при движении по радиусу поворота непостоянна; поэтому его нельзя рассматривать как влияние однородного тока.Таким образом, установка приборов и испытательных условий на морских испытательных судах увеличивает сложность идентификационного моделирования, и, следовательно, данные измерений необходимо корректировать.
По сравнению с испытанием модели корабля, ходовые испытания имеют определенные недостатки, которые требуют улучшения. В настоящее время в ВМФ Америки имеется маневренно-мореходный танк для исследования движения корабля в различных морских условиях [9]. Национальный институт морских исследований (NMRI) создал реальную модель морского бассейна с использованием инструментов моделирования ветровой и волновой нагрузки [10,11] для исследования характеристик полномасштабного корабля в реальном море.Испытание модели в помещении организовано, проведено и утверждено профессиональной организацией и оснащено сложными буксирными устройствами и камерами с зарядовой связью (CCD); Между тем, при испытаниях на открытом воздухе используются высокоточные инструменты спутникового позиционирования и береговые устройства беспроводного позиционирования на море. Благодаря стандартизации и разнообразию испытаний качество данных испытаний модели бассейна лучше, чем при испытании реального судна. Следовательно, по сравнению с тестом бассейновой модели, необходимо дополнительно обработать данные полномасштабного судна, чтобы улучшить качество его данных.
Что касается силы ветра, Isherwood, Blendermann et al. и Fujiwara et al. использовали данные испытаний в аэродинамической трубе, чтобы подобрать коэффициенты ветра [12,13,14]: во-первых, Ишервуд предложил метод оценки силы ветра по формуле, затем Блендерманн и Фудзивара обновили структуру формулы силы ветра и коэффициенты с учетом нового ветра туннельный эксперимент. В настоящее время в судоходной отрасли особое внимание уделяется коэффициенту ветра для контейнеровозов с динамической укладкой [15]. Стремясь вычислить добавленную массу, Мотора предложил простой метод [16], а Чжоу воспроизвел формулу для легкого применения [17].Для волновых возмущений Дайдола использовал силу дрейфа волны второго порядка и коэффициент момента [18], Ли использовал метод Дайдолы для моделирования движения корабля [19]. Ясукава изучал численное предсказание силы дрейфа волн второго порядка [20], а Zhang et al. [21] и Hong et al. [22] изучали волновую силу второго порядка и волновое добавленное сопротивление. Mei et al. [23] создали модель маневрирования корабля для бассейновых испытаний; В этой статье будет более подробно рассмотрено моделирование реальных маневров морского корабля.
Работа организована следующим образом: Раздел 2 кратко знакомит с традиционными методами, которые использовались для исправления результатов натурных морских испытаний.В разделе 3 предлагается новый метод поправок на основе расчета ветра, волнения и поверхностного морского течения. В разделе 4 объясняется эталонная модель и машина опорных векторов (RM-SVM) для моделирования маневрирования. В разделе 5 представлен случай пробного исправления. В разделе 6 представлено моделирование маневра. В разделе 7 обсуждаются результаты пробной коррекции и моделирования движения, а также представлены возможные варианты будущих работ. Наконец, раздел 8 завершает эту статью.
2. Традиционный метод коррекции
Как показано в литературе [6,7,8], предлагается быстрый и удобный метод коррекции, называемый традиционным методом коррекции.В, синяя линия представляет траекторию разворота в спокойной обстановке, красная линия представляет траекторию разворота с возмущениями, а зеленая стрелка представляет вектор дрейфа. Трасса на спокойной воде — это скорректированный круг поворота на -35 ° корабля под названием Юкун, в то время как нарушенный трек воспроизводится одним однородным поверхностным течением. Равномерное поверхностное течение состояло из восточного течения 0,5 м / с и северного течения 0,5 м / с.
Традиционный метод коррекции теста окружности поворота.
SNAME [7] требует, чтобы изменение курса круга поворота было больше 540 °. Предполагается, что судно достигает стадии устойчивого поворота после 360 °, и установившаяся скорость дрейфа может быть получена с использованием данных о положении установившегося поворота. Как показано на графике, согласно последней точке трека, кораблю требуется 250 с, чтобы дрейфовать на 250 м в восточном направлении и на 250 м в северном направлении.
Процесс корректировки показан следующим образом: Предположим, что положение судна как (xi, yi) и угол курса судна как ψi в момент времени ti, и i∈ {1,2,…, n}.Предположим, что положение судна как (xi ′, yi ′) и угол курса судна как ψi ′ в момент времени ti ′, а ψi — ψi ′ равен 360 ° или −360 °. In, n равно 4. Тогда расстояние сноса между (xi, yi) и (xi ′, yi ′) равно lDi. Среднюю скорость дрейфа ΔlDi между (xi, yi) и (xi ′, yi ′) можно оценить следующим образом:
ΔlDi = ∑i = 1nlDi∑i = 1n (ti − ti ′) = ∑i = 1n‖ ( xi, yi) — (xi ′, yi ′) ‖2∑i = 1n (ti − ti ′)
(1)
В процессе, рекомендованном IMO, SNAME и ITTC [6,7,8], корректировки были выполнены на основе предположения о равномерном токе и устойчивом включении.Влияние равномерного тока на путь корабля увеличивается линейно и постоянно. Однако дрейф судов, вызванный ветром и волнами, связан с ветром и углом направления волн, а дрейф судов нелинейный и изменяется во времени. Поэтому предполагается, что ветровые и волновые возмущения рассматриваются как линейные; нелинейные составляющие игнорируются. В этой статье влияния ветра, волн и течений рассчитываются отдельно на основе гипотезы, и предлагается улучшенный метод.
Поскольку этот документ посвящен маневрированию, крен, качка и вертикальная качка судна игнорируются следующими пояснениями. Во-первых, сносы, вызванные ветром и волнами, рассматриваются как долговременное движение; Между тем, в этой рукописи основное внимание уделяется маневренному движению, то есть речь идет только о волнах, колебаниях и поворотах. Таким образом, крен, качка и качка судна не учитываются. Во-вторых, маневрирование упрощено до трех степеней свободы и не зависит от мореходности.Периодические ходовые движения мало влияют на маневренные движения с большим углом руля направления. В-третьих, при обмерах качка, качка и качка корабля периодические; таким образом, движение, будучи периодическим, может быть отфильтровано. Таким образом, данные маневрирования можно использовать для коррекции и моделирования.
3. Улучшенный метод коррекции
Улучшенный метод коррекции в основном разделен на три части: во-первых, вычисление силы ветра; затем рассчитайте силу волнового дрейфа; наконец, рассчитайте расстояние сноса ветра и волн.В этом разделе корректируются помпаж и раскачивание. Рыскание рассматривается по следующим причинам: во-первых, корпус корабля под водой и надводная надводная часть корабля вместе взятые близки к форме коробки. Таким образом, рыскание, вызванное ветром и волнами, незначительно. Во-вторых, следует скорректировать рыскание для большей точности; однако это будет намного сложнее; это связано с тем, что рыскание вызывает изменение угла курса, а угол курса изменяет расстояние выброса и расстояние качания.
3.1. Расчет ветровой нагрузки
Предположим, что судно начинает разворот в момент времени t0. В момент времени t скорость судна равна V (t), угол курса — ψ (t), истинная скорость ветра — VT (t), истинное направление ветра — ψT (t), лобовая ветровая нагрузка — Xw (t), а боковая — ветровая нагрузка Yw (t). Согласно [24], сила ветра и ее составляющие, сила, ориентированная на землю (ECEF) на восток и ECEF на север, изменяются вместе с курсом судна. Таким образом, от t0 до t расстояние дрейфа, вызванного ветром, в системе отсчета, центрированной на Земле (ECEF), составляет Δxw (t) и Δyw (t), соответственно, и рассчитывается следующим образом:
{Δxw (t ) ρaUR2 (t) = ∫t0t∫t0t [AfwCwx (αwR (t)) 2m + 2mxdtcosψ (t) −AlwCwy (αwR (t)) 2m + 2mydtsinψ (t)] dtΔyw (t) ρaUR2 (t) = ∫t0t ∫t0t [AfwCwx (αwR (t)) 2m + 2mxdtsinψ (t) + AlwCwy (αwR (t)) 2m + 2mydtcosψ (t)] dt
(2)
где m — масса корабля, mx и my — добавленная масса, Afw и Alw — площадь передней проекции корабля и площадь боковой проекции соответственно, а Cwx и Cwy — коэффициенты ветра для передней и боковой проекции корабля соответственно.UR и αwR представляют собой относительную скорость и направление ветра и могут быть рассчитаны с помощью ψT, VT, V и ψ. В настоящее время испытание в аэродинамической трубе по-прежнему является лучшим способом определения коэффициента ветра. В связи с ограниченными возможностями тестирования и высокой стоимостью в данной статье применяется эмпирическая формула Блендерманна [13]. Добавленная масса рассчитывается по формулам из справочника [16,17].
3.2. Расчет силы волнового сноса
Предположим, что сила волнового сноса по долготе судна равна Xd (t), а сила волнового сноса в поперечном направлении судна равна Yd (t).Согласно [22] дрейф волн второго порядка можно разделить на ECEF (ориентированный на землю, фиксированный на земле) на восток и ECEF на север. Таким образом, от t0 до t расстояние дрейфа, вызванное силой волнового дрейфа в системе отсчета ECEF, равно Δxd (t) и Δyd (t), соответственно, и рассчитывается следующим образом:
{Δxd (t) = ∫t0t∫t0tXd ( t) m + mxdtcosψ (t) dt − ∫t0t∫t0tYd (t) m + mydtsinψ (t) dtΔyd (t) = ∫t0t∫t0tXd (t) m + mxdtsinψ (t) dt + ∫t0t∫t0tYd (t) m + mydtcosψ (t) dt
(3)
Из-за динамического изменения частоты встречи вводятся эквивалентные длины падающих волн λBX и λBY, которые удовлетворяют следующему уравнению (Уравнение (4)).Эквивалентная длина падающей волны использовалась в [22].
{EX = XdλBX = Xdλ − cosαdEY = YdλBY = Ydλ − cosαd
(4)
где λ — средняя длина падающей волны в акватории моря, а αd — направление волны.
Для требований реального времени формула Дайдола [18] используется для расчета силы дрейфа волны второго порядка. Метод Дайдола был применен в [19]. Сила дрейфа волн второго порядка Xd (t) и Yd (t) нагона и раскачивания следующие:
{Xd (t) = ρgL2ζ22 [0.05−0,2 (λBXL) +0,75 (λBXL) 2−0,51 (λBXL) 3] cos (αd) Yd (t) = ρgL2ζ22 [0,46 + 6,83 (λBYL) −15,65 (λBYL) 2 + 8,44 (λBYL) 3] sin (αd)
(5)
где ζ — средняя высота волны в акватории моря, а ζ, λ и αd рассчитываются по скорости ветра на основе гипотезы о полностью развитой волне и гипотезы о длинных гребнях волны. Таким образом, средняя высота волны в акватории моря и средняя длина волны были оценены на основе информации о силе ветра и направлении.
3.3. Результирующее расстояние, вызванное ветром, волной и течением
На основе расчета ветровой нагрузки и расчета силы сноса волн, результирующее расстояние, вызванное ветром, волнами и течениями, рассчитывается следующим образом:
{Δx (t) = k1Δxw (t) + k3Δxd (t) + k5Δxc (t) Δy (t) = k2Δyw (t) + k4Δyd (t) + k6Δyc (t)
(6)
где k1 ~ k6 — параметры настройки, а Δxc и Δyc — восточное течение и южное течение, установленные равными 1.(tj)) ki∈ [−10, + 10]
(8)
где (x0, y0) — центр окружности и решается с помощью fC; fC — функция от Kasa [25]. Между тем, ki∈ [-10, + 10] является ограничивающим условием для аномального тока. Значение этих коэффициентов, ki, оценивается алгоритмом оптимизации, называемым поиском по шаблону. Эта функция устанавливается на основе устойчивого вращения. Устойчивый поворот является условием гипотезы методов IMO, ITTC и SNAME. Исходя из этой гипотезы, коррекция сформирует заключительный этап поворота по кругу.(tj)) и курсового угла ψ (t) вычисляются скорости нагнетания, раскачивания и рыскания. Эти скорости называются идентифицированными скоростями корабля и записываются как uT, vT и rT, где «T» обозначает идентифицированное судно.
4. Метод моделирования маневра
В этом разделе создается модель всего корабля RM-SVM. Во-первых, модель RM-SVM идентифицируется с данными испытаний. На основе прогноза RM-SVM воспроизводятся данные ускорения и данные скорости. Затем данные используются для идентификации всей модели корабля с помощью алгоритма наименьших квадратов.
Данные от RM-SVM плавные и без шумов. Эти преимущества сделают результат наименьших квадратов более точным, чем данные испытаний. Кроме того, гидродинамические коэффициенты стабильны и не допускают перерегулирования.
4.1. RM-SVM Модель
В этом разделе скорректированные данные морских испытаний применяются для моделирования маневров судна. Этот метод моделирования идентификации определяет аспекты маневренности при волнении на море и в плохих погодных условиях, что является важной функцией, используемой для предотвращения столкновений в реальных морских условиях [26].Как было представлено Mei et al. [23] используется метод опорной векторной машины опорной модели (RM-SVM). Хотя моделирование не может описать информацию о следе, как показано Niu et al. [27], точность предсказания модели выдающаяся. Возьмем в качестве примера импульсное ускорение и предположим, что существует n идентифицированных образцов для измерений на корабле. K-я выборочная скорость нагнетания, раскачивания и рыскания — это uT (k), vT (k) и rT (k), а k-я функция ускорения помпажа — HT (uT (k), vT (k), rT (k), δT). (k)). Для RM k-я выборочная скорость нагнетания, раскачивания и рыскания — это uR (k), vR (k) и rR (k), а k-я функция ускорения помпажа — HR (uR (k), vR (k), rR ( k), δR (k)), где «R» обозначает эталонную модель.Понятие и метод выбора эталонной модели представлены в ссылке [23]. Основываясь на выбранной выборке для испытаний судов и эталонной модели, SVM помпажа можно записать следующим образом:
LD = ∑k = 1n (α˜k − αk) ΔH (k) −12∑k = 1n∑ℓ = 1n (α˜k − αk) (α˜ℓ − αℓ) WkTWℓ − ε∑k = 1n (α˜k + αk),
(9)
при условии:
{∑k = 1n (αk − α˜k) = 00≤αk, α˜k≤ταk [ξk + ε − wTWk − l1 + ΔH (k)] = 0α˜k [ξ˜k + ε + wTWk + l1 − ΔH (k)] = 0αkα˜k = 0, ξkξ˜k = 0 (τ − αk) ξk = 0, (τ − α˜k) ξ˜k = 0
(10)
где ℓ = 1, 2, ⋯, n — порядок выборки данных, α, α˜, θ и θ˜ — вектор лагранжевых множителей гиперплоскости SVM, ξ и ξ˜ — вектор переменной слабины в гипер-плоскости SVM. плоскости, w — вектор нормали к гиперплоскости SVM, l1 — постоянное смещение гиперплоскости SVM, τ — константа регуляризации, а ε — параметр полосы нечувствительности.Wk — входной вектор SVM, как показано ниже:
Wk = (uT (k), vT (k), rT (k), δT (k)) T
(11)
Подстановка данных выборки в уравнения (9 ) и (11) решается SVM помпажа.
Таким же образом, как SVM всплеска, можно рассчитать SVM качания и рыскания. Кроме того, идентифицированные ускорения корабля могут быть спрогнозированы следующим образом:
{u˙T (t) = u˙R (t) + wT (uT (t), vT (t), rT (t), δT ( t)) T + l1v˙T (t) = v˙R (t) + pT (vT (t), rT (t), v˙T (t), r˙T (t), δT (t)) T + l2r˙T (t) = r˙R (t) + qT (vT (t), rT (t), v˙T (t), r˙T (t), δT (t)) T + l3
(12)
где u˙T, v˙T и r˙T — идентифицированные ускорения качания и рыскания судна, u˙R, v˙R и r˙R — ускорения раскачивания и рыскания RM, p и q — нормальный вектор раскачивания и Гиперплоскость SVM по рысканью, а l2 и l3 — это постоянное смещение гиперплоскости SVM по рысканию и качанию соответственно.Уравнение (12) может быть решено интегрированием Рунге – Кутта.
4.2. Модель всего корабля
На основе предсказания уравнения (12) идентифицированные ускорения u˙T, v˙T и r˙T корабля воспроизводятся моделью RM-SVM. После того, как входной вектор будет [uT, vT, rT], на выходе будет [u˙T, v˙T, r˙T]. После того, как входной вектор и выходной вектор представлены в уравнении (13), вся модель корабля из справочника [28] идентифицируется методом наименьших квадратов. Вся структура модели и параметры перечислены в уравнении (13).
{(m′ − Xu˙ ′) u˙T ′ = Xη ′ (1 − ηT) + Xηη ′ (1 − ηT) 2 + Xηηη ′ (1 − ηT) 3 + Xvv′vT′2 + (Xrr ′ + M′xG ′) rT′2 + Xδδ′δT′2 + (Xvr ′ + m ′) vT′rT ′ + Xvvη′vT′2 (1 − ηT) + Xδδη′δT′2 (1 − ηT) (m′ − Yv˙ ′) v˙T + (m′xG′ − Yr˙ ′) r˙T = Y0 ′ + Yv′vT ′ + Yvvv′vT′3 + Yvrr′vT′rT′2 + (Yr ′ −m ′) rT ′ + Yrrr′rT′3 + Yvvr′vT′2rT ′ + Yδ′δT ′ + Yδδδ′δT′3 + Yη ′ (1 − ηT) + Yηη ′ (1 − ηT) 2 + Yδη ′ δT ′ (1 − ηT) + Yδηη′δT ′ (1 − ηT) 2 (m′xG′ − Nv˙ ′) v˙T ′ + (Iz′ − Nr˙ ′) r˙T ′ = N0 ′ + Nv ′ VT ′ + Nvvv′vT′3 + Nvrr′vT′rT′2 + (Nr′ − m′xG ′) rT ′ + Nrrr′rT′3 + Nvvr′vT′2rT ′ + Nδ′δT ′ + Nδδδ ′ δT′3 + Nη ′ (1 − ηT) + Nηη ′ (1 − ηT) 2 + Nδη′δT ′ (1 − ηT) + Nδηη′δT ′ (1 − ηT) 2
(13)
где ηT = uT / u0T, u0T — скорость обслуживания судна.
5. Пример пробной коррекции
В этом разделе улучшенная пробная коррекция применяется для расчета влияния ветра, волн и течений. Кроме того, решается тест на расстояние и скорость сноса по радиусу поворота. Затем корректируются пробный курс и скорость натурного корабля.
5.1. Общие сведения о морских испытаниях
Объектом исследования данной статьи является теплоход Yukun; и обратите внимание на подробности Юкуна. Время морских испытаний 24 августа 2012 г. с 08:00 до 14:00.Площадка морских испытаний расположена на северо-западе Желтого моря, примерно в 14 морских милях от порта Далянь. Ходовые испытания проводились на открытой и глубокой воде в ясных и хороших погодных условиях, как показано на.
Общее расположение теплохода «Юкун» [29,30] (разрешение на рисунок было получено Даляньским морским университетом).
Морской пробный район и глубина воды Юкун пробы.
Таблица 1
Сведения о судне теплохода «Юкун».
| Сведения | Значения | Сведения | Значения |
|---|---|---|---|
| Рабочий объем | 5710,2 | Площадь руля | 9065 9065 911,8 м 9094,8 м |
| Длина между перпендикулярами | 105 м | Диаметр гребного винта | 3,8 м |
| Расчетная длина по ватерлинии | 106.5 м | Номер лопасти | 4 |
| Ширина корпуса | 18 м | Коэффициент площади лопасти | 0,67 |
| Осадка при полной нагрузке | 5,4 м | 60 Максимальная скорость руля направления 2,8 ° 906 | |
| Коэффициент блочности | 0,56 | Призматический коэффициент | 0,58 |
является частичным материалом Даляньского морского университета и опубликован в справочных материалах [29,30].
От, тесты маневров перечислены в.
Таблица 2
Детали типа маневра и угла поворота руля для всех испытаний.
| НЕТ. | Время Точки (с) | Тип маневров | Угол руля (°) | Точки отбора проб | |||
|---|---|---|---|---|---|---|---|
| 1 | 38213–38769 | Окружность поворота65 65 55660 | 5 | 66 906539232–39635 | Окружность поворота | 10 | 403 |
| 3 | 39898–40231 | Окружность поворота | 15 | 333 | |||
| 430 | |||||||
| 20 | 296 | ||||||
| 5 | 44577–44985 | Окружность поворота | 25 | 408 | |||
| 6 | 45509–45946 | 0 −19065 9065 9065 9065 9065 7 | 45975–46542 | зигзаг | 20 / −20 | 567 | |
| 8 | 46606–46910 | зигзаг 90 660 | 10 / −10 | 304 | |||
| 9 | 46999–47263 | зигзагообразно | 20 / −20 | 264 | |||
| 10 | 47517–6476609 9065 9065 9065 | 9065 | 6609 9065 395 | ||||
| 11 | 48178–48566 | Окружность поворота | −30 | 388 | |||
| 12 | 49070–49450 | Показанный круг поворота 380 | 6 34 , система измерения ветра, дифференциальная система глобального позиционирования (DGPS), волоконно-оптический гироскоп и регистр скорости установлены на мачте, мостике, гироскопической палубе и носовой части судна соответственно.Положение DGPS имеет более высокую частоту обновления данных, чем система автоматической идентификации [31]. Приборная установка на судне Юкун. ( a ) Прибор для измерения положения, скорости и угла курса; ( b ) установка системы измерения ветра на мачте. 5.2. Результаты ветровой нагрузки и силы волнового сносаВременная диаграмма, подверженная ветровой нагрузке и силе сноса волн для испытания на радиус поворота + 20 °, была решена с помощью улучшенного метода уравнения (2).Как показано на рисунке, вычисляются силы нагнетания и колебания, вызванные ветром и волнами. Ветровая нагрузка показывает динамические колебания, меняющиеся во времени. Как показано на рисунке, система измерения ветра защищена мачтой. Таким образом, ветровые колебания включали экранирование мачты, порывистые составляющие и случайные составляющие ветра. Детали колебаний также позволяют судить о силе и направлении ветра. Ветровая нагрузка и сила сноса волн для испытания на радиус поворота + 20 °. ( a ) Ударная сила, вызванная волной; ( b ) импульсная нагрузка, вызванная ветром; ( c ) сила качания, вызванная волной; ( d ) колебательная нагрузка, вызванная ветром. При расчете площадь проекции передней части судна Afw составляет 297 м 2 , а площадь боковой проекции Alw составляет 1304,6 м 2 . Положение центроида по долготе Alw составляет 2,46 м, а положение центроида по вертикали — 6,8 м. 5.3. Результаты ускорения, вызванного ветром и волнойКак показано на, ускорения нагона и качания, вызванные ветром и волнами, рассчитываются по уравнению (5). Испытание на ускорение круга поворота + 20 °, вызванное ветром и волной.( a ) Скачкообразное ускорение, вызванное волной; ( b ) импульсное ускорение, вызванное ветром; ( c ) колебательное ускорение, вызванное волной; ( d ) колебательное ускорение, вызванное ветром. 5.4. Результаты измерения расстояния, вызванного ветром и волнойКак показано на рисунке, временная история Юкун, подвергшегося воздействию ветра и волн на расстоянии в испытании по кругу поворота + 20 °, решена с помощью улучшенного метода уравнений (6) и (8) соответственно. Результаты настройки параметров k1 ~ k6 равны −2.46, 1,02, -1,24, 1, -0,21 и -0,37 соответственно. Ветер, волны и морские поверхностные течения индуцировали центрированные по центру земли фиксированные на земле (ECEF) расстояния с радиусом поворота + 20 °. ( a ) Расстояние поперечного сноса, вызванное ветром; ( b ) расстояние дрейфа долготы, вызванное ветром; ( c ) расстояние поперечного дрейфа, вызванное волной; ( d ) расстояние дрейфа долготы, вызванное волной; ( e ) расстояние поперечного дрейфа, индуцированное током; ( f ) расстояние дрейфа долготы, вызванное током; ( g ) результирующее поперечное расстояние сноса, вызванное ветром, волной и течением; ( ч ) результирующее расстояние дрейфа по долготе, вызванное ветром, волной и течением. отображает компоненты расстояния дрейфа, вызванные ветром, волнами и течениями. Расстояния представляют собой один и тот же порядок величины влияния ветра, волн и течений на поверхности моря, ни одно из расстояний нельзя игнорировать. Суммарные дистанции сноса будут использоваться для корректировки курса судна и расчета скорости колебания и рыскания. 5.5. Результаты корректировки курса и скоростиРасстояния, вызванные ветром и волной, использовались для корректировки курса судна; сравнение исходной окружности поворота и скорректированной окружности поворота представлено в.показывает, что первоначальный круг поворота значительно смещается в отрицательном направлении ECEF под воздействием ветра и волновых течений. Корректировка расстояния сноса, вызванного ветром, волнами и течениями для испытания на радиус поворота + 20 °. Как показано на, скорости скачка и рыскания скорректированы. Когда поворот достигает установившейся стадии, скорректированная продольная скорость уменьшается и постепенно приближается к стабильному значению. Однако на этапе 200–250 с скорость бревна увеличивается.Скорректированная скорость раскачивания стабильна на уровне 0 м / с, в то время как скорректированная скорость раскачивания быстро увеличивается в пределах от 0 до 60 с и сходится к -1,52 м / с через 57 с. Поскольку скорость рыскания не корректируется, линии перекрываются. Корректировка скоростей системы отсчета ECEF для теста на круг поворота + 20 °. ( a ) Скорость нагнетания корабля; ( b ) скорость качания корабля; ( c ) скорость рыскания корабля. Все испытания в и были исправлены. В предыдущей рукописи мы выбрали только тест зигзага 20 ° для исправления и моделирования.В настоящее время остальные представлены в Приложении B. Эти исправленные случаи испытаний показывают, что улучшенный метод исправления применим для ходовых испытаний. Эти ходовые испытания будут использованы для моделирования в следующем разделе. 6. Пример моделирования маневраВ этом разделе модель маневрирования судна устанавливается с помощью зигзагообразных тестов 6, 7, 8 и 9 из. Модель идентификации — это один из методов, основанный на данных, и это распространенный метод в морской сфере [32]. Кроме того, модель прогнозирования теста окружности поворота + 20 ° обучается по уравнениям (9) — (11).На основе метода, предложенного в [22], в качестве эталонной модели Yukun выбран корабль S175. Кроме того, SVM обучается зигзагообразным тестом. Таким образом, создается модель маневрирования РМ-СВМ Юкун. 6.1. Испытание на круг поворота + 20 °Испытание на круг поворота на + 20 ° предсказывается уравнением (12), как показано на рис. Прогноз для испытания на радиус поворота + 20 °. ( a ) Судовой путь; ( b ) угол курса и угол руля; ( c ) скорость нагнетания; ( d ) импульсное ускорение; ( e ) скорость раскачивания; ( f ) раскачивающееся ускорение; ( g ) скорость рыскания; ( ч ) рысканье ускорение. Из этого можно сделать следующие выводы. Согласно общим результатам прогноза, значения RM-SVM относительно стабильны, без значительных численных аномалий и флуктуаций, что указывает на стабильность идентификационной модели, установленной RM-SVM. По результатам прогноза скорости значения RM-SVM близки к скорректированным значениям. Поскольку момент рыскания не учитывается при решении влияния, скорость рыскания не корректируется, поэтому скорректированная скорость рыскания равна исходному значению. 6.2. Результат по гидродинамическому коэффициенту судна и проверка круга поворота -35 °Модель RM-SVM получена на основе уравнения (12). Затем RM-SVM используется для получения данных ускорения [u˙T, v˙T и r˙T], данных скорости [uT, vT, rT] и данных угла поворота руля δT. Эти данные состоят из входных и выходных выборок. Используя алгоритм линейной регрессии по методу наименьших квадратов и отправив образец в уравнение (13), оцениваются гидродинамические коэффициенты судна, как показано на рис.Детали судовых гидродинамических коэффициентов отмечены в [28]. Таблица 3Результаты идентификации безразмерных гидродинамических коэффициентов нагона, качания и рыскания для модели корабля Юкун.
На основании гидродинамических коэффициентов в, прогнозируется радиус поворота -35 °.Известны масса корабля и момент инерции. Добавленная масса и добавленный момент оцениваются по ссылке [3,16,17] как m′ − Xu˙ ′ = 0,010249, m′ − Yv˙ ′ = 0,017853, m′xG′ − Yr˙ ′ = 0,00071412, m′xG. ′ −Nv˙ ′ = 0,001086 и Iz′ − Nr˙ ′ = 0,000015514. Результаты предсказания теста на круг поворота на -35 ° показаны на рис. Таблица 4Валидация для испытания на угол поворота −35 ° полномасштабного корабля Yukun и сравнение со стандартом IMO.
Как показано в, прогресс от морских испытаний и прогноз RM-SVM меньше, чем предел IMO стандарт маневренности корабля 4.5 L , как и тактический диаметр 5 L . Установлено, что полномасштабное судно соответствует стандарту IMO. С другой стороны, точность предварительного прогноза RM-SVM составляет 93% от результата морских испытаний, а тактический диаметр — 97%. Эта точность показывает высокую точность моделирования маневра. 7. ОбсуждениеДля метода коррекции улучшенный метод вычисляет влияние ветра, волн и течений, но традиционный метод рассматривает ветер и волны как однородное течение.Таким образом, усовершенствованный метод, предлагаемый в этой статье, является общей формой, тогда как традиционный метод — специальной формой. Однако это не значит, что улучшенная идеальна. Вообще говоря, морские испытания требуют наличия буйка или радиолокационной волновой системы для измерения высоты волны. В тесте Юкун этого девайса нет. Как описано в методологии, усовершенствованный метод предполагает, что ветер и волны полностью развиты, а состояние моря и вызванное движение судна принимаются как стационарные процессы.Высота и длина волны предсказываются с помощью силы ветра. С другой стороны, при расчете дрейфа корабля рыскание, вызванное ветром и волной, не учитывалось. Таким образом, в будущих работах может быть рассмотрена возможность корректировки рыскания в реальном море. Для модели маневрирования движение судна с постоянной настройкой двигателя прогнозируется с хорошей точностью. Условия настройки двигателя на ходовых испытаниях соответствуют стандарту IMO по маневренности судов. Однако, как и в случае с морским автономным надводным кораблем (MASS), требование маневрирования корабля будет гораздо более сложным с технической точки зрения.Другие условия, такие как изменение оборотов двигателя и балластная нагрузка, будут обычными в будущих исследованиях. Можно предвидеть, что моделирование маневров корабля будет связано с MASS для сложного планирования траектории движения корабля, слежения за ним и предотвращения столкновений. 8. ВыводыВ этой статье были проверены данные измерений монтажного оборудования полномасштабного теплохода, решены и устранены влияния ветра и волн, а также скорректированы ход и скорость морских испытаний.По результатам скорректированных ходовых испытаний на ходу создана маневренная модель натурного корабля. Зигзагообразные тесты использовались в качестве обучающих данных для прогнозирования теста на круг поворота. На основе идентификационной модели были воспроизведены ускорения. Наконец, была идентифицирована вся модель корабля и проверены результаты моделирования при испытании на радиус поворота +35. Подводя итог вышеупомянутой работе, можно сделать следующие выводы:
БлагодарностиАвторы выражают признательность Даляньскому морскому университету и X.K. Чжан за поддержку. Приложение AПоскольку призматический коэффициент Cp является одной из основных характеристик, оценка предлагается в этом приложении. В Lpp — длина между перпендикулярами, s_AM — площадь миделя, а Δ — водоизмещение судна. Рисунок A1Формованные линии миделя [29,30] (разрешение на рисунок получено Даляньским морским университетом). Приложение BКак показано на, и, все ходовые испытания исправлены. Рисунок A2Результат коррекции трека и скоростей для теста NO. 1–4. ( a ) Трек №1; ( b ) скорости №1; ( c ) трек №2; ( d ) скорости NO 2; ( e ) трек №3; ( f ) скорости № 3; ( г, ) дорожка №4; ( ч ) скорости №4. Рисунок A3Результат коррекции трека и скоростей для теста №.5–9. ( a ) Трек №5; ( b ) скорости № 5; ( c ) трек №6; ( d ) скорости NO 6; ( e ) трек №7; ( f ) скорости № 7; ( г, ) дорожка №8; ( ч ) скорости NO.8. Рисунок A4Результат коррекции трека и скоростей для теста NO. 9–12. ( a ) Трек №9; ( b ) скорости NO.9; ( c ) трек №10; ( d ) скорости NO.10; ( e ) трек №11; ( f ) скорости № 11; ( г, ) дорожка №12; ( ч ) скорости NO.12. Вклад авторовКонцептуализация, Б. и L.S .; методология, Б.М.; программное обеспечение, Б.М.; проверка, G.S .; формальный анализ, Б.М.; расследование, Б.М .; ресурсы, Б.М .; курирование данных, B.M .; письменность — оригинальная черновая подготовка, Б.М .; написание — просмотр и редактирование, л. с .; визуализация, Г.С .; наблюдение, Л.С. Все авторы прочитали и согласились с опубликованной версией рукописи. ФинансированиеЭто исследование финансировалось Национальным фондом естественных наук Китая, номера грантов: 51579025; Фонд естественных наук провинции Ляонин, номер гранта: 20170540090. Конфликт интересовАвторы заявляют об отсутствии конфликта интересов. Список литературы1. Ли Х.В., Ро М.И. Обзор динамики многотельных объектов на судах и морских сооружениях. Ocean Eng. 2018; 167: 65–76. DOI: 10.1016 / j.oceaneng.2018.08.022. [CrossRef] [Google Scholar] 2. Абковиц М.А.Измерение гидродинамических характеристик по результатам маневровых испытаний судов методом идентификации системы. Пер. SNAME. 1980; 88: 283–318. [Google Scholar] 3. Чжан Г., Чжан X., Пан Х. Автоматическая идентификация методом наименьших квадратов с использованием множества инноваций для моделирования маневрирования корабля с 4 степенями свободы с данными полномасштабных испытаний. ISA Trans. 2015; 56: 75–85. DOI: 10.1016 / j.isatra.2014.12.002. [PubMed] [CrossRef] [Google Scholar] 4. Бай В.В., Рен Дж.С., Ли Т.С. Мультиинновационная градиентная итеративная идентификация обучения с локальным взвешиванием для нелинейной системы маневрирования корабля.China Ocean Eng. 2018; 32: 288–300. DOI: 10.1007 / s13344-018-0030-0. [CrossRef] [Google Scholar] 5. Ким Д.В., Кнуд Б., Матиас П. Оценка гидродинамических коэффициентов по результатам ходовых испытаний с использованием метода идентификации системы. J. Korean Soc. Mar. Environ. Saf. 2017; 23: 258–265. DOI: 10.7837 / kosomes.2017.23.3.258. [CrossRef] [Google Scholar] 7. Руководство Общества морских архитекторов и морских инженеров (SNAME) по ходовым испытаниям (прогрессивная скорость, маневрирование и выносливость), Технический и исследовательский бюллетень. SNAME; Александрия, Вирджиния, США: 2015.С. 3–47. [Google Scholar] 8. Международная конференция по буксировочным танкам (ITTC). Рекомендуемые процедуры и инструкции — полномасштабные маневренные испытания. ITTC; Universitätsstrasse, Цюрих, Швейцария: 2017. С. 14–15. [Google Scholar] 9. Бишоп Р.К., Белкнап В., Тернер К. Параметрическое исследование влияния демпфирования крена GM и надводной формы на реакцию на крен модели 5613. Военно-морской центр надводной войны; West Bethesda, MD, USA: 2005. С. 11–17. [Google Scholar] 10. Национальный институт морских исследований (NMRI) Разработка инновационной методологии испытаний модели танка для измерения фактических характеристик судов в море.NMRI; Токио, Япония: 2016. С. 13–21. [Google Scholar] 11. Национальный институт морских исследований (NMRI) Исследования по разработке устройства энергосбережения в реальном море. NMRI; Токио, Япония: 2017. С. 79–84. [Google Scholar] 12. Ишервуд Р.М. Сопротивление ветру на торговых судах. Пер. РИНА. 1973; 115: 327–338. [Google Scholar] 13. Блендерманн В. Определение параметров ветровых нагрузок на суда. J. Wind Eng. Ind. Aerod. 1994; 51: 339–351. DOI: 10.1016 / 0167-6105 (94)-1. [CrossRef] [Google Scholar] 14. Фудзивара Т., Уэно М., Нимура Т. Оценка сил и моментов ветра, действующих на суда. J. Soc. Нав. Archit. Jpn. 1988. 183: 77–90. DOI: 10.2534 / jjasnaoe1968.1998.77. [CrossRef] [Google Scholar] 15. Андерсен В.И.М. Ветровые нагрузки на контейнеровоз post-panamax. Ocean Eng. 2013. 58: 115–134. DOI: 10.1016 / j.oceaneng.2012.10.008. [CrossRef] [Google Scholar] 16. Мотора С. Об измерении добавленной массы и добавленного момента инерции движения корабля. J. Zosen Kiokai. 1959; 105: 83–92. DOI: 10.2534 / jjasnaoe1952.1959.83. [CrossRef] [Google Scholar] 17.Чжоу З.М., Шэн З.Й., Фен В.С. О прогнозировании маневренности многоцелевого грузового корабля. Корабль англ. 1983; 6: 21–36. [Google Scholar] 18. Дайдола Дж. К., Грэм Д. А., Чандраш Л. Программа моделирования маневрирования судна на малых скоростях; Материалы 11-го симпозиума по судовым технологиям и исследованиям; Портленд, штат Орегон, США. 21–23 мая 1986 года; С. 156–161. [Google Scholar] 19. Ли З., Сунь Дж., Бек Р.Ф. Оценка и модификация надежного контроллера слежения за траекторией морских надводных судов в волновых полях.J. Ship Res. 2010; 54: 141–147. [Google Scholar] 20. Ясукава Х. Моделирование маневрирования корабля на волнах. Первое сообщение об развороте. J. Soc. Нав. Archit. Jpn. 2006. 4: 127–136. DOI: 10.2534 / jjasnaoe.4.127. [CrossRef] [Google Scholar] 21. Чжан В., Цзоу З.Дж. Моделирование во временной области движений судов в условиях маневрирования, вызванных волнами. J. Mar. Sci. Technol. Jpn. 2016; 21: 154–166. DOI: 10.1007 / s00773-015-0340-3. [CrossRef] [Google Scholar] 22. Хун Л., Чжу Р.С., Мяо Г.П., Фань Дж., Ли С. Исследование дополнительного сопротивления судов, движущихся волнами.Ocean Eng. 2016; 123: 238–248. DOI: 10.1016 / j.oceaneng.2016.07.033. [CrossRef] [Google Scholar] 23. Мэй Б., Сун Л., Ши Г. Прогнозирование маневрирования корабля на основе идентификации модели серого ящика с помощью адаптивного RM-SVM с малым углом поворота руля. Pol. Марит. Res. 2019; 26: 115–127. DOI: 10.2478 / pomr-2019-0052. [CrossRef] [Google Scholar] 24. Ябуки Х., Йошимура Ю., Исигуро Т., Уэно М. Поворот корабля с одним ВПП и одним рулем направления во время остановочного маневра в ветреную погоду. Международная конференция по маневренности судов и морскому моделированию; Терсхеллинг, Нидерланды: 2006.С. 4–5. [Google Scholar] 25. Каса И. Процедура подбора кривой и анализ ее ошибок. IEEE Trans. Instrum. Измер. 1976; 25: 8–14. DOI: 10.1109 / TIM.1976.6312298. [CrossRef] [Google Scholar] 26. Бакди А., Рад И.К., Ванем Э., Энгельгардцен Э. Идентификация риска столкновения нескольких судов и посадки на мель на основе AIS на основе адаптивной области безопасности. J. Mar. Sci. Англ. 2020; 8: 5. DOI: 10.3390 / jmse8010005. [CrossRef] [Google Scholar] 28. Сунг Й.Дж., Пак С.Х., Ан К.С. SIMMAN 2014. FORCE Technology; Люнгбю, Дания: 2014.Оценка характеристик маневрирования на глубокой воде KVLCC2 на основе теста PMM и моделирования RANS; С. 1–6. [Google Scholar] 29. Шан Х.Ф. Дипломная работа. Даляньский морской университет; Далянь, Китай: 2013. Исследование цикличности «ЮКУН» под влиянием ветра и течения. [Google Scholar] 30. Su Z.J. Дипломная работа. Даляньский морской университет; Далянь, Китай: 2011. Численное моделирование и анализ параметрической качения судна «ЮКУН» [Google Scholar] 31. Цзян Ю., Чжэн К. Метод оценки местоположения на основе однобережной станции автоматической системы идентификации.Датчики. 2020; 20: 1590. DOI: 10,3390 / с20061590. [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar] 32. Ким Д., Ли С., Ли Дж. Прогнозирование мощности двигателя на основе данных с использованием опорной векторной регрессии с бортовыми измерениями и данными об океане. Датчики. 2020; 20: 1588. DOI: 10,3390 / с20061588. [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar]Воздушные демонстрации и динамическое маневрированиеПараграф 3-146 приказа определяет право участников и требует, когда это уместно, документацию о пилотажной компетенции, обычно называемую Заявлением о пилотажной компетенции или Карта SAC.Карта SAC — это форма 8710-7 FAA, выданная специалистом по оценке пилотажных навыков (ACE), назначенным FAA, или аналогичная форма 26-03-07 транспортной категории. Ответственный инспектор («IIC») авиашоу будет применять эти определения динамического маневрирования либо в одиночном полете, либо в групповом полете:
В соответствии с параграфом 3-146, если исполнители намереваются участвовать в динамическом маневрировании, они должны представить ответственному инспектору FAA Заявление о пилотажной компетенции с подтверждением динамического маневрирования и предоставить доказательства тренировочного выполнения в течение 45 дней до начала соревнований. событие авиашоу.В соответствии с этим новым Приказом выступление должно было проходить в тренировочной обстановке. Артисты не могут повторно получить свою валюту, выполняя динамическое маневрирование во время «тренировочного дня» на авиашоу. К счастью, выступления на авиашоу, такие как Prowlers of the Pacific , являются устаревшими, и от них не потребуется демонстрировать участие в 30 практических занятиях перед тем, как пройти к оценщику пилотажных навыков. Тем не менее, даже устаревшие характеристики авиашоу, включающие динамическое маневрирование, должны будут пройти до оценщика высшего пилотажа и быть оценены. Гиг — работа — это работа? Uber и другие компании маневрируют, чтобы найти ответЭто было потенциально радикальное предложение от регулирующего органа Техаса: компании, которые используют «цифровую сеть» для отправки сотрудников, как это делает Uber, могут называть их подрядчиками, а не сотрудниками. Предложение, сделанное в декабре, стало поворотным моментом в кампании, которая разыгралась в законодательных органах и судах во многих штатах, и даже в Вашингтоне, поскольку в последние годы известность Uber и других компаний, занимающихся гиг-экономикой, приобрели известность. Лоббисты, участвовавшие в этой работе от штата к штату, работали за кулисами, чтобы предоставить разработчикам правил шаблон. На балансе могут висеть миллиарды долларов затрат и даже фундаментальные бизнес-модели, поскольку все больше крупных компаний переходят к публичному размещению акций. Когда такие компании могут классифицировать рабочих как подрядчиков, им не нужно вносить взносы в страхование по безработице или компенсацию рабочим, или соблюдать законы о минимальной заработной плате и сверхурочной работе. По оценкам представителей отрасли, рабочая сила сотрудников обходится компаниям на 20–30 процентов больше, чем рабочая сила подрядчиков — сумма, которая для Uber составляет многие сотни миллионов долларов в год. Группы по защите интересов рабочих говорят, что их цель состоит в том, чтобы убрать правила классификации в достаточном количестве мест, чтобы создать давление в пользу широкого исключения на национальном уровне. Что примечательно в инициативе Техаса, которая будет применяться только к страхованию от безработицы, так это то, что она возникла не из демократически избранного органа, а из непрозрачной бюрократии. Не было ни слушаний, на которых задавали вопросы посторонним, ни значимых дебатов в зале — всего несколько формальных заявлений на публичных собраниях и 30-дневный период комментариев, прежде чем агентство могло выдвинуть окончательное предложение. «Все это застало нас врасплох», — сказал Хосе Гарза, исполнительный директор Workers Defense Project, некоммерческой группы из Техаса, которая помогает рабочим бороться с кражами заработной платы и неправильной классификацией. В течение нескольких недель толчок к введению правила был неясен. Представитель агентства, Комиссия по трудовым ресурсам Техаса, публично отрицала, что при разработке предложений она полагалась на «внешние источники». Но это повествование резко изменилось в начале марта, когда группа г-на Гарзы получила набор электронных писем от комиссии через запрос публичных архивов.Документы, о которых также сообщала газета The Texas Observer, предполагают новую амбициозную фазу кампании компаний, занимающихся гиг-экономикой, по решению своей проблемы классификации работников. Электронные письма с участием одного комиссара и ее сотрудников свидетельствуют об обширном общении с лоббистами, работающими с Tusk Ventures, фирмой, занимающейся венчурным капиталом и политической стратегией. Tusk, в свою очередь, был оставлен Handy, компанией, которая отправляет рабочих в стиле Uber для выполнения домашних дел, таких как уборка и ремонт.Основатель стратегической фирмы Брэдли Туск когда-то был главным политическим консультантом Uber и остается крупным акционером, который может обналичить миллионы в капитале, когда Uber станет публичным в этом году. Tusk Ventures, по-видимому, был основным автором предложения Техаса. Большая часть проекта, выпущенного Комиссией по трудовым ресурсам, отражает предложение, которое лоббист направил агентству годом ранее. Лиза Гивенс, пресс-секретарь агентства, сказала, что не знала о переписке, когда ранее давала комментарии. И Техас — не единственное место, где Tusk обратился к регулирующим органам, а не к законодательным органам, с просьбой закрепить статус рабочих в качестве подрядчиков. Судя по электронным письмам, фирма предпринимала аналогичные усилия в других штатах, например в Иллинойсе. Отвечая на вопрос о стратегии работы через регулирующие органы, г-н Туск сказал: «Если мы считаем, что это правильная политика, наша задача — довести ее до конца, и это может быть наиболее эффективным местом». Он предвосхитил этот план в своей книге, опубликованной в сентябре.«Мы работаем под разными углами зрения, чтобы добиться этого на федеральном уровне», — написал он. «И мы работаем над законодательством и правилами еще в 13 штатах». Что делает рабочего подрядчиком?Различные законы штата и федеральные законы определяют занятость несколько по-разному, но большинство из них сосредоточено на таких факторах, как наличие у менеджеров значительного контроля над работниками и то, является ли работа центральной для бизнеса компании. Uber, Lyft и Handy утверждают, что их сотрудников следует считать подрядчиками, потому что они сами решают, когда, где и как долго они будут работать.Компании заявляют, что экспериментируют с идеями, например, с пособиями, для повышения экономической безопасности работников. Но скептики утверждают, что компании осуществляют контроль через рейтинги, которые вызывают определенное поведение, например вежливое обращение с пассажирами, и запрещая водителям, отменяющим слишком много поездок. Uber и Lyft также определяют ставки оплаты труда водителей, что обычно решают независимые подрядчики. В последние годы суды, государственные и федеральные агентства не пришли к согласию по этому вопросу.Но мало споров о том, что, если суды и регулирующие органы классифицируют большое количество рабочих, работающих на концертах, как наемных сотрудников, этот шаг будет крайне разрушительным для компаний, которые от них зависят. Lyft в своей недавней подаче заявки на первичное публичное размещение акций сообщила потенциальным инвесторам, что необходимость классифицировать движущие силы как сотрудников «может потребовать от нас значительного изменения нашей существующей бизнес-модели», и предупредила о потенциальном «денежном риске». Около пяти лет назад гиг-компании начали препятствовать этой перспективе.В законодательстве, которое Uber и Lyft поддержали для легализации своего бизнеса, они часто добивались положений, указывающих на то, что водители, вызывающие такси, являются подрядчиками. Около 25 штатов приняли такие положения, известные как разделение. В других штатах Uber и Lyft работали с более широкой группой компаний, чтобы большинство рабочих, направляемых через цифровые платформы, а не только водителей, были классифицированы как подрядчики. «Позвольте мне прояснить ситуацию», — заявил лоббист Uber в 2016 году перед комитетом Сената Аризоны, рассматривавшим такой закон.«Такие компании, как GrubHub, Handy, Lyft, Postmates, Thumbtack, YourMechanic, TaskRabbit, — сказала она, — все« участвовали в разработке этого закона и его продвижении в более чем 10 штатах ». Вскоре мера прошла. Некоторые законодательные органы являются более легкой мишенью, чем другиеОдним из следствий этих общеотраслевых мер является то, что они могут повлиять на гораздо большее, чем на нынешних рабочих. По словам Майи Пинто из Национального проекта закона о занятости, некоммерческой группы по защите интересов рабочих, которая только что опубликовала отчет по этой теме, более широкие меры побуждают компании реклассифицировать сотрудников в качестве подрядчиков.По словам г-жи Пинто, любой бизнес, который направляет сотрудников, таких как сантехники, электрики или няни, может считать их подрядчиками, используя цифровой интерфейс для координации работы и выполняя несколько других критериев. Марла Канемицу из Tusk Ventures, которая помогла разработать такие меры, сказала, что мотивировка счетов заключается не только в сохранении статуса подрядчика для сотрудников Handy, но и в том, чтобы позволить компаниям предоставлять льготы, такие как здравоохранение и выход на пенсию. средства сбережения, которые в противном случае могли бы указывать на трудовые отношения. «Движущей силой всегда было предоставление льгот, — сказала г-жа Канемицу. За первые шесть месяцев 2018 года шесть штатов приняли законопроекты, в целом исключающие рабочих-гигантов из трудового законодательства и классифицирующие их как подрядчиков. В книге г-на Туска эти штаты называются «низко висящими плодами Кентукки, Айовы, Теннесси, Индианы и Юты (и плодами средней высоты, такими как Флорида)». Но в других штатах плоды стояли на значительно большей высоте: усилия не увенчались успехом в Колорадо, Джорджии, Северной Каролине и Калифорнии. Колорадо с большим технологическим сектором является, пожалуй, наиболее поучительным примером. Штат был первым, кто принял закон, легализующий компании по прокату автомобилей, такие как Uber, и местная лоббистская фирма, участвовавшая в этих усилиях, помогла возглавить и эту. В 2018 году компания получила более 80 000 долларов от Uber и Handy, согласно данным лоббистов, подготовленным Национальным проектом закона о занятости. Законопроект об исключении прошел через сенат, возглавляемый республиканцами, на двухпартийном голосовании в марте прошлого года, но натолкнулся на сопротивление в Палате представителей, контролируемых демократами. Стало ясно, что законодательные органы могут оказаться политической трясиной даже в тех штатах, которые казались гостеприимными. И срочность возрастала. Осенью 2018 года Handy будет приобретена публичной компанией. Uber планировал стать публичной компанией в 2019 году. Статус ее водителей оставался нерешенным во всех четырех штатах, где более широкое законодательство не удалось. Однако примерно в то же время фирма г-на Туска опробовала альтернативный подход. Дословный рисунок из черновика лоббистаВ декабре 2017 года Джерри Вальдес, лоббист из Остина, работающий в Handy, связался с помощником одного из трех членов Комиссии по трудовым ресурсам Техаса. Как и большинство лоббистов, г-н Вальдес и его коллеги заняли позу чрезвычайной заботливости. Они предоставили подробные ответы на вопросы комиссара Рут Хьюз и ее сотрудников — например, как такие предложения могут соответствовать федеральному закону. «Я уверен, что это будет информативным по обсуждаемым вопросам», — ответил старший юрисконсульт г-жи Хьюз в одном электронном письме. Редко лоббисты оказывались более полезными, чем при разработке самого правила, которое эффективно распространяло бы на всех гиг-работников освобождение, которое государство уже сделало для водителей, вызывающих такси. Г-н Вальдес направил помощнику г-жи Хьюс черновик с темой «Удобное предложение» за год до того, как комиссия опубликовала свое собственное предложение. Из девяти критериев, изложенных в проекте Handy для отнесения гигантов к подрядчикам, комиссия приняла семь почти дословно, а затем добавила два. Комиссия также внимательно следила за определениями Хэнди «рыночной платформы» и «подрядчика торговой площадки», терминов «компания» и «работник». г.Tusk, чья фирма перестала работать с Handy после того, как Handy была приобретена в прошлом году, сказал, что лоббирование государственных органов с целью изменения правил дает много преимуществ: «Вы не привязаны к законодательному календарю. Если главе комитета в Собрании штата это не нравится, потому что в их округе есть какой-то владелец бизнеса, у вас больше нет такой проблемы ». Представитель Handy сказал: «Наша работа во всех штатах, включая Техас, всегда велась по соответствующим каналам и мотивировалась желанием найти конструктивные решения. Процесс, лежащий в основе постановления Техаса, окончательная версия которого будет обсуждаться на открытом заседании, прежде чем комиссия сможет его утвердить, по-видимому, резко контрастирует с очень публичными дебатами в Колорадо. Защитники со всех сторон продолжали обсуждать способы решения проблемы статуса занятости рабочих, работающих на концертах, еще долгое время после того, как закон не прошел прошлой весной. Представители лейбористов, эксперты по политике и даже представитель Uber присутствовали на встрече, организованной аналитическим центром в Денвере, о том, как защитить гигантов от эксплуатации. «Мы взяли на себя обязательство определить истинный процесс заинтересованных сторон», — сказал Деннис Догерти, исполнительный директор федерации труда штата. Но не все были заинтересованы в открытых дебатах. В июне, когда помощник комиссара Хьюза спросил лоббистов Туска, есть ли в других штатах, где регулирующие органы, а не избранные законодатели, решают проблему подрядчиков, один из перечисленных ими штатов был особенно интригующим. | ||||