
Как правильно ехать на автомобиле в условиях ограниченной видимости
Автомобилист — звучит гордо! Но к сожалению, в последнее время ситуация на дорогах обострилась и возникают постоянные стычки между сотрудниками службы автоинспекции и водителями. Условия ограниченной видимости часто провоцируют такие вот споры. И при возникновении таких сложных ситуаций в выигрыше остаётся всегда автоинспекция. Сотрудники службы никогда не признают свою неправоту, благо форма им позволяет. Попробуем разобраться в этом вопросе подробнее.
Что это за зона такая
Наверное, каждый водитель знает, что существует два понятия. Речь идёт о зоне недостаточной видимости и зоне ограниченной видимости. Это на первый взгляд кажется, якобы эти два понятия означают одно и то же. А на деле — это совершенно разные вещи, и мы разберём, что означает каждое.
Условия плохой видимости на дороге из-за тумана
Начнём с зоны недостаточной видимости. Это такая зона, при которой создаётся ситуация, не дающая возможности водителю смотреть далеко.
Теперь узнаем, а что означает зона ограниченной видимости? Оказывается, к этой зоне могут относиться участки дороги, скрытые от взгляда водителя. Этому способствует геометрическая составляющая дороги или объекты, расположенные на таком участке. Например, здания или дома могут скрывать лежащий впереди путь. Также скрывать дорогу могут возвышенности, лес или растительность. Вот всё это и называется зоной ограниченной видимости.
Важно знать, что в любом случае вдоль дороги, если в этом месте действует зона ограниченной видимости, должен стоять знак, об этом предупреждающий. И если такой знак имеется, а он стоит всегда до зоны, предупреждая водителя сбросить скорость, но водитель нарушает правила — он виноват и его можно оштрафовать. Но как быть, если знака нет?
И если такой знак имеется, а он стоит всегда до зоны, предупреждая водителя сбросить скорость, но водитель нарушает правила — он виноват и его можно оштрафовать. Но как быть, если знака нет?
Как подтверждает российская реальность, и в этом случае водитель должен быть готов к штрафу. И доказать свою невиновность водитель не сможет, так как почему-то законом такой момент не урегулирован и сотрудники сами решают, как действовать. Интересно, правда? Это и есть актуальная для многих водителей большая проблема.
Условия плохой видимости на дороге из-за ливня
Оказывается, эта проблема имеет глубокие корни, искать которые следует в прошлом. Вернёмся на несколько лет назад, в эпоху СССР. Всё-таки это была великая держава и уже тогда, обнаружив несоответствия и несовершенства в правилах дорожного движения, государство решило принять меры. Во многих союзных республиках этим делом серьёзно заинтересовались. Были рассмотрены жалобы водителей, в основном касающиеся именно зоны ограниченной видимости.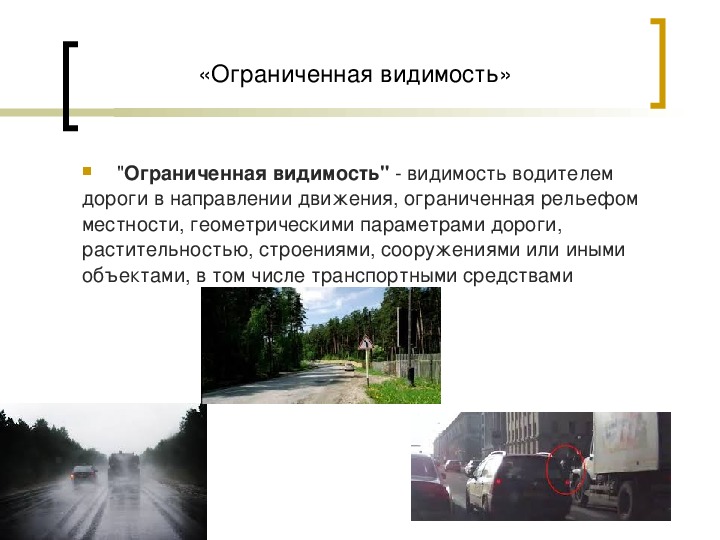
Видео о реакции водителя в условиях ограниченной видимости:
Тогда правила устанавливались ГОСТом, который использовали дорожные организации. И появлялся тогда спорный нюанс — зона ограниченной видимости и зона недостаточной видимости не одно и то же и расшифровываются совершенно по-разному. И противоречие это, возникшее между двумя законодательствами, бьёт сильно по головам автомобилистов.
Обгон — возможен ли он
Что же, узнаем немного про обгон в условиях плохой видимости. Чтобы это правило дорожного движения понять до конца, для начала определимся со словом «обгон». Что оно означает и подразумевает?
Обгон — это опережение одного или нескольких транспортных средств, связанное с выездом на полосу проезжей части, предназначенной для встречного движения, и последующим возвращением на ранее занимаемую часть дороги.

Прежде чем начать обгон, водитель обязан удостовериться, что встречная полоса, на которую он намеревается выехать, — свободна. И это не создаст опасности для перемещения других участников движения.
Обгон запрещён при многих ситуациях, и это всё указывается в ПДД. И зона ограниченной видимости также запрещает обгон. Самостоятельно определить эту зону не так уж легко, но если водитель сомневается, то лучше от манёвра отказаться.
Можно ли ехать в дождь
Теперь рассмотрим такое понятие, как движение под дождём. Первое, что приходит на ум опытного водителя, когда он движется под дождём, это опасность заноса. И это правильно. Особенно опасно ездить под дождём на заднеприводных автомобилях, хотя и переднеприводные в таких случаях может занести. Одним словом, движение под дождём опасно!
Некоторые водители до сих пор понять не могут, а почему нельзя? Они ехали под дождём и ничего. Свяжем всё опять же с зоной ограниченной, а в нашем случае недостаточной видимости.
На видео — особенности езды в дождь:
Лужа может скрывать угрозу
Связано с зоной ограниченной видимости и пересечение водных препятствий. Так, даже небольшая лужа таит в себе угрозу. Вода в состоянии спрятать от глаз водителя камни, острые предметы и тому подобное. Понятно, что ни одному автомобилисту не захочется заехать на препятствие с острыми краями. Если оно и будет заметно на обычной сухой дороге, в дождь, когда много луж, этого уже не замечаешь.
Кроме опасностей вышеописанных, водные препятствия могут повредить автомобилю и иначе. К примеру, вода может вывести из строя рабочие узлы транспортного средства или разрушить различные агрегаты. Часто бывает так, что водитель на скорости въезжает в большую лужу и автомобиль прямо там на месте глохнет. Приходится высушивать трамблёр и ждать, мешая движению на дороге.
К примеру, вода может вывести из строя рабочие узлы транспортного средства или разрушить различные агрегаты. Часто бывает так, что водитель на скорости въезжает в большую лужу и автомобиль прямо там на месте глохнет. Приходится высушивать трамблёр и ждать, мешая движению на дороге.
Ситуаций на дороге в дождь может возникнуть множество. Поэтому следует отказаться в такой момент от манёвров, обязательно сбросить скорость и не пытаться доехать до места в спешке.
Несколько советов, как ездить при плохой видимости
Теперь рассмотрим наиболее частые случаи ограниченной видимости. Один из них называется «мёртвая зона». Некоторые водители про неё даже не догадываются, а опытные знают и проверяют по-разному. Можно поставить панорамное стекло заднего вида или дополнительные зеркала, где вдруг исчезнувший автомобиль, едущий сзади, будет замечен.
Ещё одна опасная ситуация, которая может возникнуть по вине ограниченного обзора, возникает в городе. Это когда водителя, который подъезжает к остановке, ждёт автобус или маршрутка.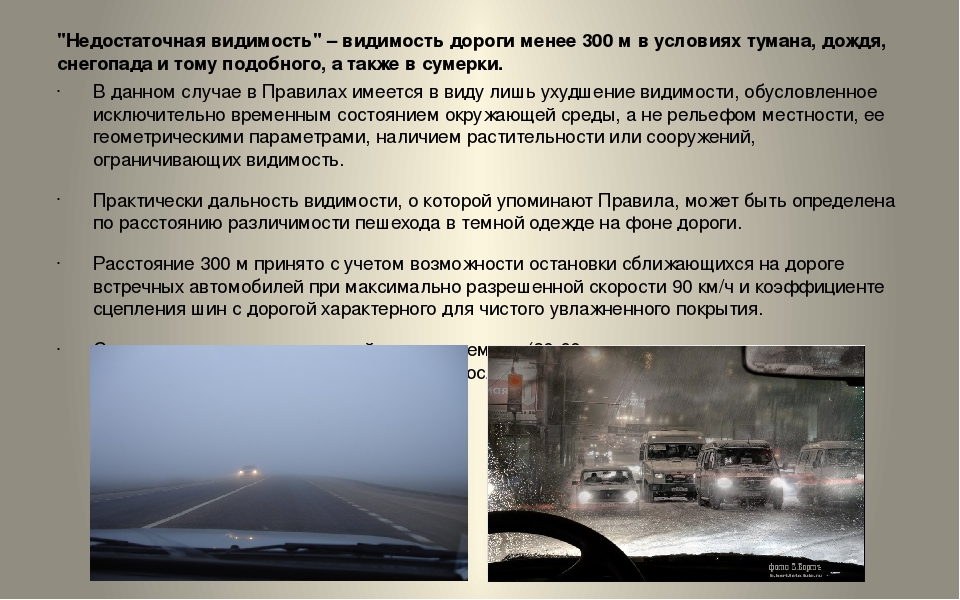 Он не видит пешеходов, которые не знают правил и переходят дорогу впереди автобуса, хотя делать это нужно сзади. Что делать? Смотрим под бампер стоящего автобуса или машины и, если там нет ног пешехода, продолжаем движение.
Он не видит пешеходов, которые не знают правил и переходят дорогу впереди автобуса, хотя делать это нужно сзади. Что делать? Смотрим под бампер стоящего автобуса или машины и, если там нет ног пешехода, продолжаем движение.
Ухудшать обзор может и малая дистанция между автомобилями. Поэтому приближаться к другим машинам, особенно крупногабаритным, во время движения не стоит. Короткая дистанция опасна не только из-за этого, но и ввиду резкого торможения.
Будьте всегда начеку и ничего не случится! Если вы заметили, что видимость ограничена, сбросьте скорость и не идите на обгон, не маневрируйте. Если начался сильный дождь, а вам некуда спешить, лучше переждите осадки, сидя в кафе за чашечкой горячего чая.
О ДВИЖЕНИИ ВОДНОГО ТРАНСПОРТА В УСЛОВИЯХ ОГРАНИЧЕННОЙ ВИДИМОСТИ
В связи с ограниченной видимостью на внутренних водных путях Республики Саха (Якутия), вызванной ухудшением обстановки с природными пожарами на территории Республики Саха (Якутия), в целях обеспечения безопасности судоходства, в том числе при осуществлении перевозок пассажиров и грузов, судовладельцам и экипажам судов необходимо неукоснительно исполнять нормы, регламентирующие обеспечение безопасности при осуществлении перевозок, вплоть до временного ограничения движения судов до наступления благоприятных условий для судоходства.
В соответствии с п.п. 5, 165 Правил плавания судов по внутренним водным путям, утвержденных Приказом Минтранса России от 19.01.2018 № 19 (далее Правила плавания), в условиях, при которых визуальная видимость ограничена из-за тумана, мглы, снегопада, сильного ливня, песчаной бури или иным причинам и составляет менее километра (далее — условия ограниченной видимости), в светлое время суток судоводители должны применять визуальную сигнализацию, предписанную настоящими Правилами для темного времени суток. При плавании в условиях ограниченной видимости судно (состав) должно подавать соответствующие звуковые сигналы, указанные в Приложении № 2 к Правилам плавания.
На основании п. 162 Правил плавания, движение скоростных судов в неводоизмещающем положении разрешается только в светлое время суток при видимости километр и более.
Согласно п. п. 166-169 Правил плавания, при плавании в условиях ограниченной видимости на ходовом мостике, кроме лица, выполняющего обязанности рулевого, должны находиться два судоводителя, при этом одним из судоводителей должен являться капитан судна.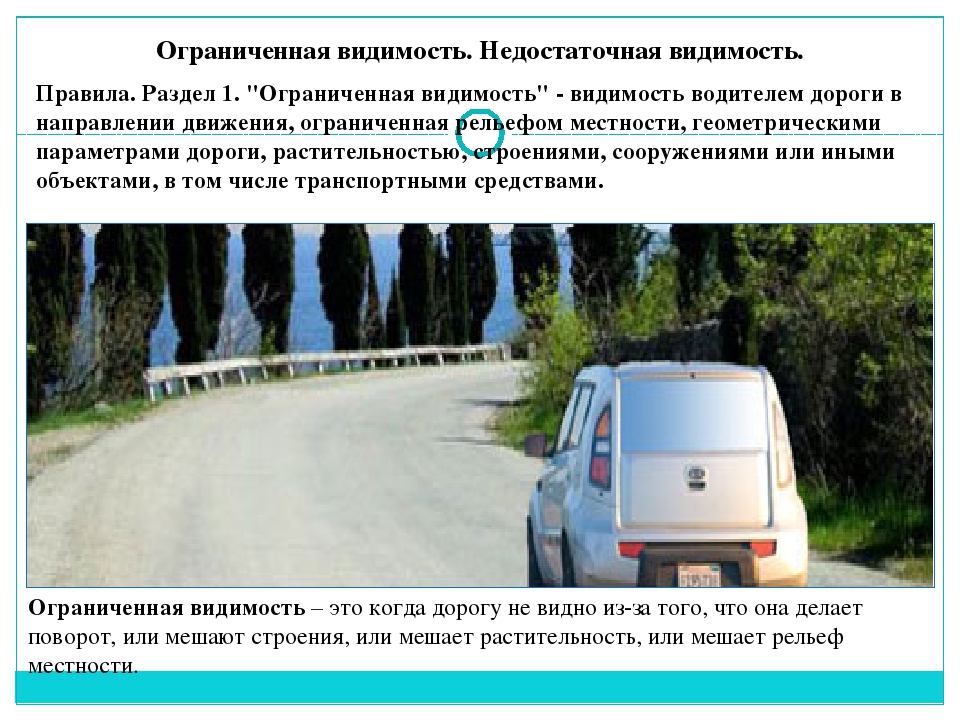 При плавании в условиях ограниченной видимости на судне должно быть обеспечено постоянное визуальное, слуховое и радиолокационное наблюдения, а также постоянное слежение на радиоканале, предназначенном для передачи сообщений о бедствии, безопасности судоходства, срочных сообщений, согласования взаимных действий судоводителей и обмена информацией с береговыми службами в части организации движения судов. Движение судов в условиях ограниченной видимости разрешено, если на судне имеется и используется следующее находящееся в исправном состоянии оборудование: радиолокационная станция; прибор, указывающий скорость поворота судна, или компас; судовое устройство УКВ радиосвязи, позволяющее осуществлять УКВ радиосвязь между судами и между судном и береговыми пунктами диспетчерского регулирования движения судов; устройство для подачи звуковых сигналов. Судно (состав) должно немедленно остановиться при ухудшении видимости, наличии других судов, если условия плавания не обеспечивают безопасность дальнейшего движения судна (состава).
При плавании в условиях ограниченной видимости на судне должно быть обеспечено постоянное визуальное, слуховое и радиолокационное наблюдения, а также постоянное слежение на радиоканале, предназначенном для передачи сообщений о бедствии, безопасности судоходства, срочных сообщений, согласования взаимных действий судоводителей и обмена информацией с береговыми службами в части организации движения судов. Движение судов в условиях ограниченной видимости разрешено, если на судне имеется и используется следующее находящееся в исправном состоянии оборудование: радиолокационная станция; прибор, указывающий скорость поворота судна, или компас; судовое устройство УКВ радиосвязи, позволяющее осуществлять УКВ радиосвязь между судами и между судном и береговыми пунктами диспетчерского регулирования движения судов; устройство для подачи звуковых сигналов. Судно (состав) должно немедленно остановиться при ухудшении видимости, наличии других судов, если условия плавания не обеспечивают безопасность дальнейшего движения судна (состава). Если в составе визуальная связь между буксируемыми судами и буксировщиком становится невозможной, состав должен остановиться в ближайшем безопасном месте.
Если в составе визуальная связь между буксируемыми судами и буксировщиком становится невозможной, состав должен остановиться в ближайшем безопасном месте.
На основании п.п. 172, 173 Правил плавания, в условиях ограниченной видимости запрещается движение пассажирских судов и судов с нефтегрузами, имеющими температуру вспышки паров ниже 60 °С, их остатками, взрывчатыми или ядовитыми веществами и их остатками, экранопланам, судам на воздушной подушке, скоростным судам и судам с динамическим принципом поддержания в неводоизмещающем положении. Судам длиной 20 метров и менее, парусным судам и судам, занятым ловом рыбы, в условиях ограниченной видимости запрещается выходить на судовой ход.
В соответствии с п.п. 170, 171 Правил плавания, суда, которые прекратили движение или которым плавание в условиях ограниченной видимости не разрешено, должны отстаиваться по возможности в таких местах, где они не будут создавать затруднений для ориентировки и прохода других судов, продолжающих движение. Капитан судна/судоводитель при принятии решения о движении, обгоне или расхождении в условиях ограниченной видимости и на участках ВВП с неосвещаемыми в темное время суток средствами навигационного оборудования должен учитывать фактическую дальность видимости, интенсивность движения судов, соотношение габаритов судов (составов) и судового хода, характеристики и ограничения радиолокационного оборудования, установленного на судне.
Капитан судна/судоводитель при принятии решения о движении, обгоне или расхождении в условиях ограниченной видимости и на участках ВВП с неосвещаемыми в темное время суток средствами навигационного оборудования должен учитывать фактическую дальность видимости, интенсивность движения судов, соотношение габаритов судов (составов) и судового хода, характеристики и ограничения радиолокационного оборудования, установленного на судне.
Согласно п. 175 Правил плавания, в условиях ограниченной видимости, за исключением судов, указанных в п.п. 172, 173 Правил плавания, разрешается: при ширине судового хода менее 100 метров — движение одиночных самоходных судов с механическим двигателем, толкаемых составов с несамоходным судном только вверх; при ширине судового хода от 100 до 200 метров — двухстороннее движение одиночных самоходных судов с механическим двигателем, а также движение толкаемых составов только вверх; при ширине судового хода свыше 200 метров — двухстороннее движение самоходных судов с механическим двигателем и составов, а также движение плотовых составов только по озерам и водохранилищам; на каналах независимо от ширины судового хода при визуальной видимости берегов по траверзу и не менее двух длин судна (состава) по курсу — двухстороннее движение одиночных самоходных судов с механическим двигателем и толкаемых составов.
На основании п.п. 176, 177 Правил плавания, при ограниченной видимости запрещаются расхождение и обгон судов (составов) на участках, где судовой ход имеет ширину менее 200 метров, если визуальная видимость составляет менее трех длин судна (состава). Судоводитель судна (состава), обгоняющего другое судно (состав) в условиях ограниченной видимости, должен по УКВ радиосвязи получить от судоводителя обгоняемого судна (состава) разрешение на обгон и согласовать с ним место обгона и взаимные маневры.
В соответствии с п.п. 178, 179 Правил плавания, при плавании в условиях ограниченной видимости при обнаружении на экране радиолокатора эхо-сигналов судов, положение и движение которых может создать ситуацию чрезмерного сближения, или при приближении к участку ВВП, где могут находиться невидимые на экране радиолокатора суда, судоводители обязаны уменьшить скорость до минимальной или полностью прекратить движение судна и сообщить по УКВ радиосвязи судоводителям других судов о подходе к такому участку. Судоводитель, который обнаружил присутствие другого судна только с помощью радиолокатора, должен определить, развивается ли ситуация чрезмерного сближения и/или существует ли опасность столкновения. Если опасность столкновения существует, то судоводитель должен своевременно предпринять действия для обеспечения расхождения. При этом насколько возможно следует избегать изменение курса: влево, если другое судно находится впереди траверза и не является обгоняемым; в сторону судна, находящегося на траверзе или позади траверза.
Судоводитель, который обнаружил присутствие другого судна только с помощью радиолокатора, должен определить, развивается ли ситуация чрезмерного сближения и/или существует ли опасность столкновения. Если опасность столкновения существует, то судоводитель должен своевременно предпринять действия для обеспечения расхождения. При этом насколько возможно следует избегать изменение курса: влево, если другое судно находится впереди траверза и не является обгоняемым; в сторону судна, находящегося на траверзе или позади траверза.
Согласно п.п. 180, 181 Правил плавания, судоводители судов и составов при движении в одном направлении в условиях ограниченной видимости, если они не намерены производить обгон, должны соблюдать между собой безопасную дистанцию, которая должна быть не менее пятикратного расстояния, необходимого судну (составу) для полной остановки, судоводители встречных судов (составов) при ограниченной видимости должны заблаговременно по УКВ радиосвязи договориться об удобном месте расхождения/пропуска и, за исключением расхождения с плотовыми составами, осуществлять его только левыми бортами следующим образом: судно (состав), идущее вверх, при подходе к согласованному месту расхождения/пропуска должно уклониться вправо насколько это необходимо и безопасно, уменьшить скорость до минимальной или остановиться и осуществить пропуск встречного судна по левому борту; судно (состав), идущее вниз, при подходе к согласованному месту расхождения/пропуска должно заблаговременно уменьшить хоД до минимального, уклониться вправо насколько это необходимо и безопасно и следовать так до тех пор, пока встречное судно (состав) не будет полностью пройдено.
Судовладельцам судов, указанных в п. 162 Правил плавания необходимо учитывать, что резкое ухудшение условий видимости может наступить в процессе осуществления рейса, вследствие чего, в случае неуверенности в оценке ситуации, а также невозможности прогноза ухудшения условий видимости в процессе осуществления рейса, необходимо отказаться от выполнения рейса, в целях недопущения угроза причинения вреда жизни и здоровью граждан, а также окружающей среде.
Движение в условиях тумана | Движение автомобиля в дождь
В этой статье мы рассмотрим особенности вождения автомобиля в условиях недостаточной видимости.
Начнем с того, что вспомним определение термина, что такое недостаточная видимость.
Далее в статье:
Что такое недостаточная видимость
Движение в условиях тумана
Движение автомобиля в дождь
Движение автомобиля в снегопад
Что такое недостаточная видимость
В соответствии с определением, данным пункте 1. 2 ПДД, недостаточной считается видимость дороги менее 300 метров в условиях тумана, дождя, снегопада и тому подобного, а также в сумерки.
2 ПДД, недостаточной считается видимость дороги менее 300 метров в условиях тумана, дождя, снегопада и тому подобного, а также в сумерки.
Недостаточная видимость лишает вас возможности видеть объекты дорожной обстановки на достаточно далеком расстоянии. Становится трудно разобраться в том, что происходит впереди по движению.
Из-за этого приходится очень сильно напрягать бдительность, а эти усилия требуют большого нервного напряжения. В таком состоянии повышенного внимания находятся все присутствующие на данном участке дороги.
Каждый из них в любой момент может совершить нечто, что выходит за рамки концепции безопасного движения.
Что необходимо делать в таких случаях? Для начала есть смысл вспомнить о том, что входит в необходимые условия для безопасного передвижения по дорогам. Это:
Если вы, управляя автомобилем, регулируете и контролируете эти условия, то вы обеспечиваете себе относительно спокойное и безопасное движение.
Предположим, вы движетесь по дороге в плотном транспортном потоке, и впереди вас едет большой грузовик или, например, большой рейсовый автобус.
Сменить полосу у вас нет возможности, так как вторая полоса занята другим транспортным средством. Справа от вас – край проезжей части.
Габаритное ТС, едущее впереди вас, перекрывает вам обзор, и из-за этого вам трудно увидеть дорожные знаки впереди по движению, да и общую обстановку в целом.
Ситуация усугубляется, если это происходит во время дождя или по грязной снежной «каше», перемешанную с противоледными реагентами.
В таких условиях грязный шлейф из-под колес едущего впереди автомобиля «ложится» на ваше лобовое стекло, дополнительно ухудшая и без того недостаточную видимость.
Единственный выход из такой ситуации, чтобы обеспечить себе обзор — это увеличить дистанцию до впереди идущего автомобиля. Стекла от этого чище не станут, но появится дополнительное время на принятие решения для маневра.
Не нужно бояться того, что в этот «просвет» кто-нибудь сразу вклинится. Если, все же, вас кто-то обогнал, и вклинился перед вами, то можно опять немного сбавить газ, и увеличить дистанцию – отпустить того вперед.
Этим самым вы обеспечите себе обзор и дополнительное время для того, чтобы успеть в случае необходимости среагировать, например, плавно затормозить.
Теперь о том, с какой скоростью двигаться в сложных дорожных (или погодных) условиях.
Правило выбора скорости движения любого транспортного средства формулируется следующим образом: скорость движения автомобиля (автобуса, мотоцикла, велосипеда и т.д.) должна быть такой, чтобы остановочный путь был меньше расстояния видимости.
В чем разница между понятиями тормозной путь и остановочный путь — ответ в комментариях к разделу 10 ПДД.
Поэтому, когда видимость дороги ухудшена погодными условиями (туман, снегопад, сильный дождь, песчаная буря), снижение скорости для всех участников дорожного движения просто необходимо. В противном случае, возможна «цепная реакция» столкновений.
С величиной бокового интервала, когда автомобили двигаются строго по своим полосам или, даже, по неразмеченным рядам, вопросов, обычно, не возникает. Важно поддерживать боковой интервал достаточным для того, чтобы не соприкоснуться бортами.
Важно поддерживать боковой интервал достаточным для того, чтобы не соприкоснуться бортами.
Далее — особенность движения в условиях тумана, движение автомобиля в дождь и снегопад. Особенность не физического перемещения, а в плане видимости и восприятия дорожной обстановки в перечисленных условиях.
Движение в условиях тумана
Туман – это атмосферное явление при изменении температур воздуха, когда воздух наполняется взвешенными капельками воды – конденсация водяного пара.
Туман образовывается в низинах, где большая влажность и он может, как быстро возникнуть, и так же быстро исчезнуть.
Казалось бы, вы только что ехали, и ничего не было, а тут вдруг – перед глазами настоящее молочное облако. Хуже всего, что за этой молочной пеленой может находиться все, что угодно – и ямы, и машины, и любое неожиданное препятствие.
Чем опасно движение в условиях тумана?
О том, что в сильном тумане видимость почти нулевая, даже говорить не приходится. Но главная особенность тумана – это его способность обманывать наше зрение, искажая картину действительности.
Все объекты в тумане кажутся дальше, чем находятся на самом деле, т.е. туман очень сильно отдаляет предметы.
В условиях тумана расстояние до предметов представляется дальше, чем они находятся. А скорость автомобиля наоборот, кажется меньше, чем в действительности.
Если вы внезапно въехали в туман, то есть смысл немедленно погасить скорость и включить противотуманные фонари, если такие имеются.
Целесообразно сбавить скорость даже в том случае, если вы движетесь по знакомой местности.
Есть два негласных правила, как нужно себя вести в процессе движения в условиях тумана: это стараться быть максимально заметным для других и самому активно смотреть по сторонам.
Откройте окно – в тумане очень хорошо передаются звуки – и вы будете слышать все вокруг. Возможно, вы услышите приближающийся автомобиль и звуковым сигналом дадите ему знак о своем присутствии.
Если туман такой густой, что ничего вообще не видно, то есть смысл переждать его в стороне от дороги, и продолжить движение после того, как прояснится.
Двигаясь в потоке машин в условиях тумана, отстаньте от едущей впереди машины на несколько метров – на самом деле она ближе, чем вам кажется. Визуально туман увеличивает расстояние, поэтому легко обмануться.
Надо помнить, что туман – это вода. Ее капельки оседают везде, в том числе и на дороге. А на влажном покрытии становится скользко и тормозной путь увеличивается. В самый раз вспомнить приемы торможения на скользкой дороге.
Скорость автомобиля при движении в условиях тумана нужно контролировать в зависимости от уровня видимости, в особенности, если приходится ехать в тумане ночью.
Рекомендуется использовать или противотуманные фары, или ближний свет. Дальний свет в тумане не помощник, потому что световой пучок направлен вверх и туманное «молоко» становится более плотным.
Движение автомобиля в дождь
Если поездки в тумане как-то можно избежать, например, не выезжать рано утром, не ездить ночью, то от дождя уже точно никуда не деться.
Дождь может пойти в любое время, а осенью – это частое явление. Еще, в последние годы участилось такое явление, как «ледяной дождь». Это когда он идет на границе минусовой и плюсовой температуры перед заморозками.
Еще, в последние годы участилось такое явление, как «ледяной дождь». Это когда он идет на границе минусовой и плюсовой температуры перед заморозками.
Сам по себе дождь неприятен не только потому, что снижается видимость на дороге, но и потому, что делает дорогу мокрой и скользкой, тем самым ухудшая способность автомобиля передвигаться.
Первые капли дождя на дороге (особенно на асфальте) – для водителей самые опасные. Дело в том, что на любой дороге всегда имеется слой пыли и песка, который намокнув, превращается в нечто, вроде смазки между шинами и дорогой.
Когда дождь идет какое-то время, эта дорожная грязь смывается и качество сцепления колеса с дорогой становится немного лучше. Но в любом случае нужно помнить, что мокрая дорога – это скользкая дорога.
Залог безопасной езды на мокром шоссе – хорошие шины. Протектор должен иметь остаточную высоту не менее допустимой.
Вода из-под колес во время движения отводится благодаря водоотводным канавкам на протекторе – ламелям, вследствие чего обеспечивается надежное пятно контакта колеса с дорогой.
Если шина «лысая», то о хорошем сцеплении с дорожной поверхностью не может быть речи. Это будет равносильно езде по льду.
Более того, когда температура воздуха снижается до +3+5 градусов, летние шины теряют свои летние характеристики – резина становится менее эластичной и сцепление с дорожным покрытием ухудшается.
Отдельная особенность наших, отечественных дорог – это их колейность. Колея даже при небольшом дожде заполняется водой и колесо автомобиля в такой колее – все равно, что на водяной подушке.
При резком торможении или ускорении в этих условиях автомобиль может «поплыть». Происходит полная или частичная потеря сцепления колеса с дорогой.
Это явление получило название аквапланирование. Возникает вопрос: какие могут быть последствия даже при частичной потере управления во время дождя?
Ответ на него достаточно простой. Можно легко оказаться за пределами дороги или непроизвольно врезаться в другой автомобиль. Один из таких случаев рассмотрен в статье Последствия аквапланирования.
Другая неприятность во время движения в дождь – это лужа. Ее коварство заключается в том, что она может оказаться как мелкой, так и глубокой, скрывая под собой яму, всякие неровности, камни и пр. И чем эта лужа ближе к обочине, тем больше будет слой грязи на ее дне.
Ни в коем случае не пытайтесь преодолеть лужу на высокой скорости – вы рискуете потерять контроль над управлением. Вдобавок, возможно попадание воды в подкапотное пространство, а это чревато проблемами в электрике, и не только там.
Перед тем, как в лужу заехать, необходимо заблаговременно снизить скорость. А выехав из лужи, особенно если она оказалась глубокой, целесообразно проверить тормоза и, если необходимо, просушить тормозные колодки, несколько раз нажав не педаль тормоза в движении.
Когда идет частый и сильный дождь, то создается ощущение, что все вокруг как будто погружается в туман. Если это происходит ночью, то видимость дополнительно осложняется отражением света встречных фар от мокрой дороги.
Ехать во время сильного дождя нужно так же осторожно, как при езде в тумане. Правда, в случае с дождем на помощь приходят исправно работающие стеклоочистители.
Движение автомобиля в снегопад
Падающий редкий снег чем-то напоминает небольшой дождь — особых помех не доставляет. Снежинки, попадая на теплое стекло, тают, и лишний раз приходится включать «дворники».
Свежий снег легко проминается и утрамбовывается колесами проезжающих машин.
Когда идет плотный снег, то в плане видимости создается такое же ощущение, как и в сильный дождь — впереди белая стена, особенно, если снег уже покрыл землю и не тает.
Когда снегопад густой, почти единственное, что вы можете отчетливо видеть, — это правый край дороги. Еще, возможно, будет видна середина дороги и габаритные огни передних автомобилей, которые, между прочим, периодически будут теряться в снежной пелене.
Видимость дороги очень недостаточная, и движение, в целом, будет осложняться толщиной снежного покрова.
Техника безопасности движения автомобиля в снегопад примерно такая же, как и во время движения в условиях тумана, но с дополнением в виде преодоления толщи налипающего снега.
Несколько приемов управления автомобилем в снегопад — в статье Вождение автомобиля зимой. Маневрирование.
Что можно сделать, чтобы адаптироваться к недостаточной видимости, и таким образом обеспечить себе возможность своевременного реагирования на опасность?
Такая возможность достигается выбором тактики движения автомобиля:
- Снижайте скорость. Двигайтесь так, чтобы была возможность в случае опасности остановиться в пределах видимого участка дороги, той видимости, что у вас есть.
- Увеличивайте дистанцию. Помните, что в условиях недостаточной видимости вам требуется больше времени и места для осуществления любого маневра, даже для остановки.
При очень плохой видимости, когда границы дороги вместе с машинами становятся трудно различимы, целесообразно покинуть дорогу (найти для этого удобное место, что тоже довольно не легко), и подождать там улучшения погодных условий. А когда остановитесь, не забудьте включить аварийную сигнализацию.
А когда остановитесь, не забудьте включить аварийную сигнализацию.
В следующей статье рассмотрим особенности вождения автомобиля в темное время суток.
Будьте внимательны за рулем.
Навигация по серии статей<< Выполнение разворота. Часть 2Движение в темное время суток >>Датчики| Бесплатный полнотекстовый | Планирование движения с ограниченной видимостью для автономной парковки с использованием оценки набора достижимости
1. Введение
Технология автономного вождения используется для поддержки автомобильной промышленности по нескольким направлениям, от вопросов безопасности до комфорта при вождении. Достижения в области технологий устранили необходимость водителей уделять внимание сохранению полосы движения или поддержанию расстояния между автомобилями во время вождения. Однако удобство автоматизации ограничено необходимостью припарковаться по окончании движения, что огорчает водителей как психологически, так и физически [1]. К сожалению, 23% всех дорожно-транспортных происшествий происходит на парковках (столкновение автомобиля с автомобилем и столкновение автомобиля с пешеходом), из которых 30% происходят из-за парковки в закрытой зоне, где могут возникнуть серьезные травмы и повреждения [2]. Если парковка может осуществляться автоматически без вмешательства человека, такая система может сделать водителя более комфортным и безопасным [3]. В этом смысле системы автоматической парковки (AVP) являются одной из самых многообещающих технологий, позволяющих водителям освободить себя от бремени парковки.В 2003 году на автомобильном рынке была представлена первая автоматизированная система парковки [4], которая могла самостоятельно управлять парковочным местом. В настоящее время эта первоначальная система была расширена до автоматической парковки служащим (AVP), которая позволяет водителю вызвать автомобиль, нажав кнопку, или дает команду парковаться самостоятельно. На уровне автоматизации, доступном в настоящее время; однако водитель должен постоянно контролировать систему из соображений безопасности.
К сожалению, 23% всех дорожно-транспортных происшествий происходит на парковках (столкновение автомобиля с автомобилем и столкновение автомобиля с пешеходом), из которых 30% происходят из-за парковки в закрытой зоне, где могут возникнуть серьезные травмы и повреждения [2]. Если парковка может осуществляться автоматически без вмешательства человека, такая система может сделать водителя более комфортным и безопасным [3]. В этом смысле системы автоматической парковки (AVP) являются одной из самых многообещающих технологий, позволяющих водителям освободить себя от бремени парковки.В 2003 году на автомобильном рынке была представлена первая автоматизированная система парковки [4], которая могла самостоятельно управлять парковочным местом. В настоящее время эта первоначальная система была расширена до автоматической парковки служащим (AVP), которая позволяет водителю вызвать автомобиль, нажав кнопку, или дает команду парковаться самостоятельно. На уровне автоматизации, доступном в настоящее время; однако водитель должен постоянно контролировать систему из соображений безопасности. Основная причина мониторинга системы автоматизации связана с ограниченным диапазоном датчика, основанным на принципе измерения, неблагоприятными условиями окружающей среды или закупоркой.Кроме того, из соображений безопасности необходимо учитывать текущее поле зрения, а также для обеспечения комфорта и предотвращения неожиданных и резких реакций. К сожалению, из-за припаркованных транспортных средств и других конструкций текущего поля зрения датчиков на парковке недостаточно для учета новых препятствий (пешеходов), выходящих из закрытых зон. Во многих подходах к ограниченному диапазону датчиков новые препятствия обрабатываются реактивным планированием [5,6,7,8,9,10,11], которое имеет дело только с видимыми препятствиями.Однако, если видимость ограничена, требуется упреждающее планирование для обнаружения рисков внутри невидимой в противном случае области.
Основная причина мониторинга системы автоматизации связана с ограниченным диапазоном датчика, основанным на принципе измерения, неблагоприятными условиями окружающей среды или закупоркой.Кроме того, из соображений безопасности необходимо учитывать текущее поле зрения, а также для обеспечения комфорта и предотвращения неожиданных и резких реакций. К сожалению, из-за припаркованных транспортных средств и других конструкций текущего поля зрения датчиков на парковке недостаточно для учета новых препятствий (пешеходов), выходящих из закрытых зон. Во многих подходах к ограниченному диапазону датчиков новые препятствия обрабатываются реактивным планированием [5,6,7,8,9,10,11], которое имеет дело только с видимыми препятствиями.Однако, если видимость ограничена, требуется упреждающее планирование для обнаружения рисков внутри невидимой в противном случае области. Для отражения невидимой области мы предлагаем упреждающий подход к преодолению ограниченной видимости на парковке. Мы разделили предлагаемый подход на три этапа: оценка границы потенциального столкновения, оценка достижимого множества и планирование в условиях ограниченной видимости. От первого до второго шага мы оцениваем возможные варианты маневра других участников путем моделирования достижимых состояний, ограниченных физикой.Затем мы представляем методологию, позволяющую избежать конфликтов при рассмотрении среды, которая включает как ограниченную видимость, так и возможное неожиданное поведение на последнем этапе.
От первого до второго шага мы оцениваем возможные варианты маневра других участников путем моделирования достижимых состояний, ограниченных физикой.Затем мы представляем методологию, позволяющую избежать конфликтов при рассмотрении среды, которая включает как ограниченную видимость, так и возможное неожиданное поведение на последнем этапе.
Основные вклады:
Предыдущие подходы к вероятностному моделированию окклюзий не могли гарантировать безопасное вождение; тем не менее, мы попросили проектировщика оптимизировать риск столкновения, моделируя детерминированный риск столкновения на парковке. Кроме того, проблема окклюзии на стоянке еще не освещена в других статьях.Здесь мы гарантируем безопасность в условиях ограниченной видимости, используя детерминированный процесс оценки риска.
Остальная часть этого документа структурирована следующим образом: В следующем разделе мы кратко рассмотрим соответствующие работы. В разделе 3 мы начинаем с обзора предлагаемого метода, прежде чем представить наш новый подход в разделах 4 и 5. В разделе 6 мы оцениваем подход в моделировании. Наконец, мы завершаем нашу работу в Разделе 7.
В разделе 6 мы оцениваем подход в моделировании. Наконец, мы завершаем нашу работу в Разделе 7.2. Сопутствующие работы
Планирование безопасного движения требует учета ограниченной видимости из невидимых областей в окружающей среде.Многие работы были посвящены различным аспектам оценки рисков и безопасного планирования в условиях ограниченной видимости. Некоторые исследователи изучали вероятностную оценку риска окклюзионных областей [12,13,14,15]. В одном из них [12] предложен вероятностный метод оценки риска с использованием объема движения на дороге, тогда как в [13] рассматривается аналогичный подход с использованием модели повреждений, основанной на массах и скоростях двух транспортных средств. Однако эти алгоритмы имеют ограничения в том, что они требуют объема трафика и массы транспортного средства, которые нельзя измерить с помощью датчика.Другой метод представляет уровень угрозы как распределение вероятностей с использованием времени до входа (TTE) и байесовской сети [14]. Кроме того, исх. [15] предложили графическую модель, способную описывать риск участка дороги с течением времени, а затем обратились к оценке занятости с использованием динамической байесовской сети. Несмотря на то, что эти исследования явно представляют риск как вероятность, так что риск может быть учтен в процессе планирования, выражение риска как вероятности не может гарантировать доказуемую безопасность.Чтобы устранить неопределенность вероятности, во многих работах используется детерминированный подход, который решает проблему наихудшего случая [16,17,18,19,20,21,22]. Планировщик, представленный в [16], имел дело с прогнозами неопределенности на перекрестках и учитывал экстренное торможение до достижения перекрестка. Работа; тем не менее, не учитывала дальность действия датчиков или приближающиеся транспортные средства за зоной восприятия. Чтобы спланировать безотказное движение, в [17] оценили набор загруженности транспортных средств в окружающей среде и рассмотрели наличие аварийного маневра, например.
Кроме того, исх. [15] предложили графическую модель, способную описывать риск участка дороги с течением времени, а затем обратились к оценке занятости с использованием динамической байесовской сети. Несмотря на то, что эти исследования явно представляют риск как вероятность, так что риск может быть учтен в процессе планирования, выражение риска как вероятности не может гарантировать доказуемую безопасность.Чтобы устранить неопределенность вероятности, во многих работах используется детерминированный подход, который решает проблему наихудшего случая [16,17,18,19,20,21,22]. Планировщик, представленный в [16], имел дело с прогнозами неопределенности на перекрестках и учитывал экстренное торможение до достижения перекрестка. Работа; тем не менее, не учитывала дальность действия датчиков или приближающиеся транспортные средства за зоной восприятия. Чтобы спланировать безотказное движение, в [17] оценили набор загруженности транспортных средств в окружающей среде и рассмотрели наличие аварийного маневра, например. г., смена полосы движения. В этой работе не принималось во внимание поле восприятия транспортного средства. В другом исследовании исх. [18] представили метод предотвращения потенциально опасных ситуаций путем осторожного въезда автомобиля на перекресток с учетом возможных перекрытых участников движения с использованием карты динамической сетки. Ref. [19] предложили метод анализа безопасности заданной траектории относительно окклюзий. Ref. [20] сосредоточились на планировании движения с учетом неопределенной модели окружающей среды с окклюзиями.Они представили метод, позволяющий избежать столкновений в худшем случае развития данной сцены. Ссылка [21,22] формализовали потенциальный риск из-за окклюзии и ограниченных возможностей датчика путем чрезмерной аппроксимации всех возможных состояний ненаблюдаемых препятствий с использованием интервалов состояний. Однако эти подходы нельзя применить к сценариям парковки автомобиля служащим. Поскольку эти алгоритмы предполагают, что препятствия появляются в соответствии с топологией дорожной карты, они не могут осторожно оценить расстояния между припаркованными автомобилями.
г., смена полосы движения. В этой работе не принималось во внимание поле восприятия транспортного средства. В другом исследовании исх. [18] представили метод предотвращения потенциально опасных ситуаций путем осторожного въезда автомобиля на перекресток с учетом возможных перекрытых участников движения с использованием карты динамической сетки. Ref. [19] предложили метод анализа безопасности заданной траектории относительно окклюзий. Ref. [20] сосредоточились на планировании движения с учетом неопределенной модели окружающей среды с окклюзиями.Они представили метод, позволяющий избежать столкновений в худшем случае развития данной сцены. Ссылка [21,22] формализовали потенциальный риск из-за окклюзии и ограниченных возможностей датчика путем чрезмерной аппроксимации всех возможных состояний ненаблюдаемых препятствий с использованием интервалов состояний. Однако эти подходы нельзя применить к сценариям парковки автомобиля служащим. Поскольку эти алгоритмы предполагают, что препятствия появляются в соответствии с топологией дорожной карты, они не могут осторожно оценить расстояния между припаркованными автомобилями.
3. Обзор
Общий процесс описан на рис. 1a – c. Мы предполагаем, что путь создан планировщиком априори. Другими словами, мы сосредотачиваемся на том, как учитывать ненаблюдаемые препятствия в процессе планирования скорости. Первый шаг — оценить потенциальную границу столкновения, которая является границей, из которой могут выскочить ненаблюдаемые препятствия, как показано на рисунке 1a. Сравнивая данные датчика дальности и объекта, мы вычисляем положение границы потенциального столкновения, обозначенной красными линиями на рисунке 1a.Затем мы предполагаем, что ненаблюдаемые препятствия могут выскочить из этих потенциальных границ столкновения. Ненаблюдаемые препятствия могут быть предсказаны с помощью сверхприближений множества достижимости, введенных в [23]. Набор достижимости относится к методу расчета расстояния, на которое препятствие преодолеет, если оно находится в зоне столкновения, как показано на рисунке 1b. Мы используем простую модель постоянной скорости для прогнозирования множества достижимости. Планировщик планирует профиль скорости для ненаблюдаемых препятствий, определяя проблему в области расстояния-времени, как показано на рисунке 1c.Чтобы определить эту проблему, мы вычисляем время начала и окончания пересечения ненаблюдаемых препятствий, следуя заранее определенному пути. Затем планировщик генерирует профиль скорости, решая алгоритм поиска A * [24]. Подробности будут объяснены в следующих разделах.
Планировщик планирует профиль скорости для ненаблюдаемых препятствий, определяя проблему в области расстояния-времени, как показано на рисунке 1c.Чтобы определить эту проблему, мы вычисляем время начала и окончания пересечения ненаблюдаемых препятствий, следуя заранее определенному пути. Затем планировщик генерирует профиль скорости, решая алгоритм поиска A * [24]. Подробности будут объяснены в следующих разделах.4. Риск в условиях ограниченной видимости
Когда окружающая среда определяется датчиком, установленным на автономном транспортном средстве, поле обзора может быть частично закрыто препятствиями, такими как припаркованные автомобили или конструкции.Кроме того, на стоянке могут быть ненаблюдаемые пешеходы, которые могут столкнуться с эго-транспортным средством. Следовательно, для безопасного вождения необходимо разработать метод учета закрытых участков. Окружающая среда эго-транспортного средства делится на области в зависимости от того, может ли транспортное средство обнаруживать наличие препятствия. Область, окруженная наблюдаемыми препятствиями, известна как «свободное пространство». И наоборот, области с препятствиями, которые мешают обнаружению препятствий, называются «неизвестными областями».Граница столкновения — это граница между свободным пространством и неизвестной областью. Среди границ столкновения граница, на которой могут появляться ненаблюдаемые препятствия, называется «границей потенциального столкновения (PCB)». Здесь мы предполагаем, что ненаблюдаемый риск из-за ограниченной видимости исходит от границы потенциального столкновения. Подробности расчета печатной платы будут объяснены в следующем разделе.
Область, окруженная наблюдаемыми препятствиями, известна как «свободное пространство». И наоборот, области с препятствиями, которые мешают обнаружению препятствий, называются «неизвестными областями».Граница столкновения — это граница между свободным пространством и неизвестной областью. Среди границ столкновения граница, на которой могут появляться ненаблюдаемые препятствия, называется «границей потенциального столкновения (PCB)». Здесь мы предполагаем, что ненаблюдаемый риск из-за ограниченной видимости исходит от границы потенциального столкновения. Подробности расчета печатной платы будут объяснены в следующем разделе.
4.1. Оценка границы потенциального столкновения
Чтобы оценить риск на границе перекрытия, сначала необходимо определить математическую модель для границы потенциального столкновения (PCB).Эта модель может быть получена в три этапа. Сначала из датчика дальности извлекаются точки-кандидаты. Затем на основе извлеченных точек-кандидатов формулируется граница свободного пространства в виде набора многоугольников. Наконец, вычитая точки из наблюдаемых препятствий на границе свободного пространства, можно определить печатную плату.
Наконец, вычитая точки из наблюдаемых препятствий на границе свободного пространства, можно определить печатную плату.
 Если самое дальнее расстояние больше порогового значения, метод разделяет линию в этой точке. Этот процесс поиска и разделения повторяется до тех пор, пока самое дальнее расстояние не станет меньше порогового значения. Наконец, границу свободного пространства можно сформулировать как набор отрезков, добавив линии, соединяющие разделенные точки (рис. 3c). Возможное столкновение может произойти между препятствиями (точки с 3 по 4) и между препятствием и максимальной дальностью действия датчика (точки с 6 по 7). По этой причине точки облачности для препятствий (точки с 1 по 6) вычитаются из границы свободного пространства, за исключением первой и последней точек облачности препятствий.С помощью описанного выше процесса печатную плату можно получить в виде набора отрезков, как показано красными линиями на рисунке 3d.
Если самое дальнее расстояние больше порогового значения, метод разделяет линию в этой точке. Этот процесс поиска и разделения повторяется до тех пор, пока самое дальнее расстояние не станет меньше порогового значения. Наконец, границу свободного пространства можно сформулировать как набор отрезков, добавив линии, соединяющие разделенные точки (рис. 3c). Возможное столкновение может произойти между препятствиями (точки с 3 по 4) и между препятствием и максимальной дальностью действия датчика (точки с 6 по 7). По этой причине точки облачности для препятствий (точки с 1 по 6) вычитаются из границы свободного пространства, за исключением первой и последней точек облачности препятствий.С помощью описанного выше процесса печатную плату можно получить в виде набора отрезков, как показано красными линиями на рисунке 3d.4.2. Прогнозирование движения с оценкой достижимого множества
Для оценки риска столкновения мы характеризуем потенциальные риски от границы потенциального столкновения. Кроме того, эго-транспортное средство и другие препятствия моделируются в виде прямоугольных форм, а чрезмерное приближение ненаблюдаемых препятствий моделируется с использованием многоугольников. Здесь мы определяем одно ненаблюдаемое препятствие для каждой потенциальной границы столкновения e со следующим состоянием, называемым интервалами в ориентации ψe (0), скорости ve (0) и начальном положении se (0), сформированных двумя вершинами s1 и s2 ( см. рисунок 4).Это можно сформулировать как
Кроме того, эго-транспортное средство и другие препятствия моделируются в виде прямоугольных форм, а чрезмерное приближение ненаблюдаемых препятствий моделируется с использованием многоугольников. Здесь мы определяем одно ненаблюдаемое препятствие для каждой потенциальной границы столкновения e со следующим состоянием, называемым интервалами в ориентации ψe (0), скорости ve (0) и начальном положении se (0), сформированных двумя вершинами s1 и s2 ( см. рисунок 4).Это можно сформулировать какse (0) ∈s1, xs1, y, s2, xs2, y
(1)
Аппроксимации набора достижимости из [23] для таких наборов начального состояния печатной платы выводятся с использованием интервалов начального состояния печатной платы в уравнениях (1) — (3). Основываясь на круге Камма [25], эти интервалы описывают физически достижимую область, ограниченную абсолютным возможным ускорением. Для простоты мы предполагаем, что набор состояний печатной платы может быть представлен в локальных координатах следующим образом:ψe (0) ∈ − ψmax, ψmax
(5)
Здесь мы объединяем формулировку круга Камма с центром c (t) и радиусом r (t) и границей круга во времени b (t).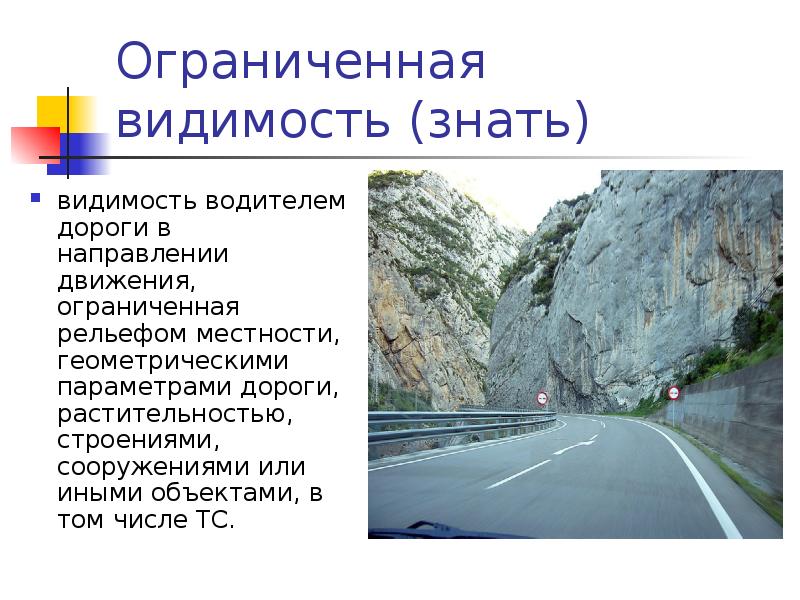
c (t) = sx (0) sy (0) + vx (0) vy (0) t
(7)
bx (t) = v0t − amax2t32v0
(9)
по (t) = 14 amax2t4− (amax2t32v0) 2
(10)
Рисунок 5a – c описывает представление этой оценки.4.2.1. Интервал начальных скоростей
Через интервал начальной скорости v0∈ [v¯, v¯] с известной ориентацией ψ (0) = 0 и начальным положением s (0) = (0,0) T можно сформулироватьc¯ (t) = c (t, v¯), c¯ (t) = c (t, v¯)
(11)
и аналогично bx и by.Здесь · ¯ — минимальное значение записи, а · ¯ — максимальное значение записи. Множество достижимости препятствия за период времени τk = [tk, tk + 1] можно аппроксимировать многоугольником с точками от q1 до q6.q1 = (cx¯ (tk) −r (tk), r (tk)) Т
(12)
q2 = (bx¯ (tk + 1), r (tk + 1)) Т
(13)
q3 = (cx¯ (tk + 1) + r (tk + 1), r (tk + 1)) T
(14)
q4 = (cx¯ (tk + 1) −r (tk + 1), — r (tk + 1)) T
(15)
q5 = (bx¯ (tk + 1), — r (tk + 1)) T
(16)
q6 = (cx¯ (tk) −r (tk), — r (tk)) Т
(17)
как показано на рисунке 5a.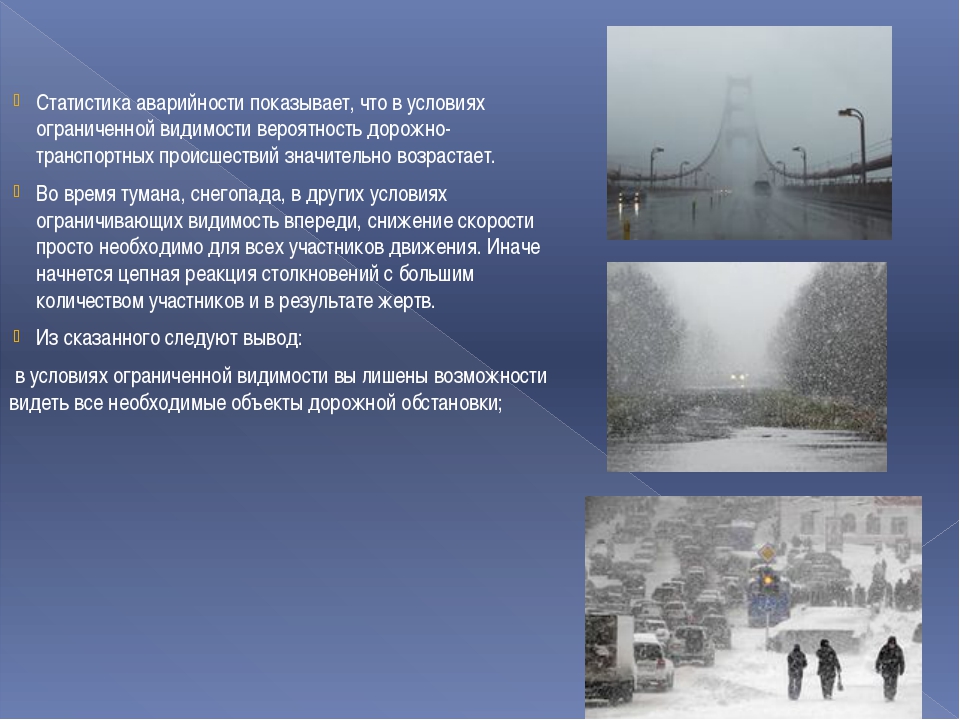 Левая часть уравнения совпадает с O1, который представляет собой красный многоугольник на рисунке 5a, но q3 и q4 оцениваются с помощью v¯. Эта граница включает все vi∈ [v¯, v¯], и каждая окружность Ck + 1 (vi) имеет одинаковый радиус r (tk + 1). Центр окружности ограничен как cx (tk + 1∈ [c¯x (tk + 1), c¯x (tk + 1)], cy = 0. Следовательно, многоугольник P (q1, q2, q3, q4, q5 , q6), натянутый на Ck¯, Ck + 1¯, и Ck + 1¯ эквивалентен O1. Этот многоугольник содержит все Ct (vi) с t∈ [tk, tk + 1], что доказывает, что этот многоугольник является над- аппроксимация всех наборов, которые могут быть достигнуты для ненаблюдаемых препятствий с начальными скоростями
Левая часть уравнения совпадает с O1, который представляет собой красный многоугольник на рисунке 5a, но q3 и q4 оцениваются с помощью v¯. Эта граница включает все vi∈ [v¯, v¯], и каждая окружность Ck + 1 (vi) имеет одинаковый радиус r (tk + 1). Центр окружности ограничен как cx (tk + 1∈ [c¯x (tk + 1), c¯x (tk + 1)], cy = 0. Следовательно, многоугольник P (q1, q2, q3, q4, q5 , q6), натянутый на Ck¯, Ck + 1¯, и Ck + 1¯ эквивалентен O1. Этот многоугольник содержит все Ct (vi) с t∈ [tk, tk + 1], что доказывает, что этот многоугольник является над- аппроксимация всех наборов, которые могут быть достигнуты для ненаблюдаемых препятствий с начальными скоростями4.2.2. Интервал начальных ориентаций
Интервал начальной ориентации ψ (0) ∈ [−ψmax, ψmax] вращает все множество достижимости P (q1, q2, q3, q4, q5, q6). Мы можем переоценить это повернутое множество. Границы набора формируются путем поворота q1, q2, q3 против часовой стрелки в сторону q1¯, q2¯, q3¯ и q4, q5, q6 по часовой стрелке в сторону q4¯, q5¯, q6¯ с использованием ψmax. Кроме того, самая дальняя продольная точка plong = (cx¯ (k + 1) + r (tk + 1), 0) T каждой окружности может быть аппроксимирована с превышением
Кроме того, самая дальняя продольная точка plong = (cx¯ (k + 1) + r (tk + 1), 0) T каждой окружности может быть аппроксимирована с превышениемw0 = (cx¯ + r (tk + 1) cosθ2) T, θ = ψmaxn
(18)
с j∈ [1, n].Примерная аппроксимация круга с ψmax около 45 градусов достигается при n = 3. Рисунок 5b описывает эту формулу, доказывая, что каждый повернутый многоугольник над [−ψmax, ψmax] включен следующим многоугольником.P (q1¯, q2¯, q3¯, w¯n, ⋯, w¯1, w0, wn¯, q4¯, q5¯, q6¯)
(21)
4.2.3. Интервал начальных положений
Преобразование из-за интервалов начального положения определяется с использованием линейной интерполяции многоугольника P¯ для s (0) ¯ = (0,0) T, как описано в предыдущем подразделе.Сначала мы создаем дубликат P¯, который переводится как s¯ (0) = (sx, sy) T, а затем вычисляем общий многоугольник обоих многоугольников O1 (τk) = Conv (P¯, P¯). Занятость каждой возможной позиции на линейном сегменте легко вычисляется по линейности перемещений и линейных сегментов. Таким образом, O1 (τk) является сверхприближением возможного множества достижимости ненаблюдаемого препятствия с ограниченным начальным состоянием. Получающееся в результате чрезмерное приближение описано с примерными параметрами на рисунке 5c.
Таким образом, O1 (τk) является сверхприближением возможного множества достижимости ненаблюдаемого препятствия с ограниченным начальным состоянием. Получающееся в результате чрезмерное приближение описано с примерными параметрами на рисунке 5c.Общая занятость O1 относится к достижимой зоне, если ненаблюдаемое препятствие происходит от границы потенциального столкновения e.Применяя оценку множества достижимости, мы можем вычислить площадь пересечения между множеством достижимости и предопределенным путем. На этапе планирования мы создаем оптимальный профиль скорости, который необходимо учитывать для зоны перекрестка. Дальнейшие подробности будут объяснены в следующей главе.
5. Планирование в условиях ограниченной видимости
Перед планированием профиля скорости для условий ограниченной видимости необходимо определить путь. Поскольку большинство ситуаций можно сформулировать как движение по заранее определенной полосе с произвольной геометрией, мы предполагаем, что проблема роуминга на парковке аналогична проблеме движения по полосе. По этой причине мы используем планировщик траектории, определенный в [10], для создания пути на парковке. В планировщике скорости мы рассчитываем только в продольном направлении, т.е. ставим задачу в одномерном направлении. Этот подход известен как разложение по траектории и скорости [26]. Сначала мы построим среду планирования для задачи, как написано в [27]. Этот подход обеспечивает общее решение для продольного направления при движении по дороге, если можно описать среду планирования.Среда планирования включает в себя, как получить желаемую скорость, как представить препятствия и как поставить цель. Затем планировщик решает задачу оптимизации, используя A *, который является хорошо известным алгоритмом планирования.
По этой причине мы используем планировщик траектории, определенный в [10], для создания пути на парковке. В планировщике скорости мы рассчитываем только в продольном направлении, т.е. ставим задачу в одномерном направлении. Этот подход известен как разложение по траектории и скорости [26]. Сначала мы построим среду планирования для задачи, как написано в [27]. Этот подход обеспечивает общее решение для продольного направления при движении по дороге, если можно описать среду планирования.Среда планирования включает в себя, как получить желаемую скорость, как представить препятствия и как поставить цель. Затем планировщик решает задачу оптимизации, используя A *, который является хорошо известным алгоритмом планирования.Два основных отличия от предыдущего подхода:
Мы прогнозируем движение ненаблюдаемых препятствий, используя чрезмерную аппроксимацию печатных плат в предыдущем разделе. Печатные платы переоцениваются путем оценки всех возможных движений, когда ненаблюдаемые препятствия внезапно выходят из печатных плат, как показано на рисунке 5. Эта приблизительная область покрывает место, где появляются ненаблюдаемые препятствия. Следовательно, с помощью чрезмерного приближения ненаблюдаемые препятствия могут быть представлены как наблюдаемые.
Эта приблизительная область покрывает место, где появляются ненаблюдаемые препятствия. Следовательно, с помощью чрезмерного приближения ненаблюдаемые препятствия могут быть представлены как наблюдаемые.Кроме того, предыдущий подход может представлять препятствия только на топологии дороги в качестве среды планирования. Это подходит для дорожного планирования, но не для парковок, поскольку ненаблюдаемые препятствия могут быть пешеходом или велосипедистом, не соблюдающим топологию дороги. Однако предлагаемый подход может справиться с этими препятствиями.Платы рассчитываются на основе поля зрения датчика LiDAR, которое не связано с топологией дороги, поэтому чрезмерное приближение печатных плат может покрыть непредсказуемое движение ненаблюдаемых препятствий, таких как пешеход или велосипедист.
5.1. Постановка задачи
Предположим, что pi = (px, py) T∈R2 — точка на центральной линии заранее определенного пути c, тогда s (pi) ∈R обозначает пройденное расстояние по пути в интервале [p0, pi] . Скорость ограничена [0, vmax], а затем vmax (s) является функцией кривизны пути κ на расстоянии s, i.е., vmax (s) = f (κ (s)). u, ускорение транспортного средства, является вводом системы в пределах [amin, amax]. Продольное движение транспортного средства формулируется дифференциальными уравнениями следующим образом:
Вдоль пути c имеется конечное множество E препятствий Ei, которые пересекаются с путем в течение периода времени τEi = [tstartEi ,tendEi] в определенной позиции sEi (t) и времени τEi. Эти препятствия ни в коем случае не должны занимать позицию sego проводника эго. Цель планировщика — найти допустимый профиль скорости.Этот план может быть получен как задача оптимизации по f, так что
Скорость ограничена [0, vmax], а затем vmax (s) является функцией кривизны пути κ на расстоянии s, i.е., vmax (s) = f (κ (s)). u, ускорение транспортного средства, является вводом системы в пределах [amin, amax]. Продольное движение транспортного средства формулируется дифференциальными уравнениями следующим образом:
Вдоль пути c имеется конечное множество E препятствий Ei, которые пересекаются с путем в течение периода времени τEi = [tstartEi ,tendEi] в определенной позиции sEi (t) и времени τEi. Эти препятствия ни в коем случае не должны занимать позицию sego проводника эго. Цель планировщика — найти допустимый профиль скорости.Этот план может быть получен как задача оптимизации по f, так чтоminu (t) (f) = minu (t) f (sego, s˙ego, s¨ego, κ (s), E)
(23)
В этой задаче должен быть только один глобальный минимум для различных ограничений. Задачу оптимизации можно преобразовать в дискретную задачу в пространстве состояний X⊆R3 с состояниями x = [s.v.t] T∈X. Затем эта проблема может быть решена с помощью поиска по графу A * [24]. Состояние xi обозначает состояние на этапе i планирования. Мы строим поисковый граф для A * в режиме онлайн, выбирая набор действий A на временном шаге Δt.На каждой итерации основного цикла A * необходимо определить, какой из его путей нужно продолжить. Это делается на основе стоимости пути, используя оценку стоимости, необходимой для продления пути к цели. В частности, A * выбирает путь, который минимизирует где g (·) — стоимость пути от начального состояния, а h (·) — эвристическая функция, оценивающая стоимость самого дешевого пути от текущего состояния до цели. A * завершается, когда путь, который он выбирает для продолжения, является путем от начала до цели, или если нет путей, которые можно было бы продолжить.Эвристическая функция зависит от задачи. Если эвристическая функция допустима, что означает, что она никогда не переоценивает фактическую стоимость достижения цели, A * гарантированно вернет путь с наименьшими затратами от начала до цели. В следующих разделах описывается, как построен график A *, его функция стоимости и эвристика.
Состояние xi обозначает состояние на этапе i планирования. Мы строим поисковый граф для A * в режиме онлайн, выбирая набор действий A на временном шаге Δt.На каждой итерации основного цикла A * необходимо определить, какой из его путей нужно продолжить. Это делается на основе стоимости пути, используя оценку стоимости, необходимой для продления пути к цели. В частности, A * выбирает путь, который минимизирует где g (·) — стоимость пути от начального состояния, а h (·) — эвристическая функция, оценивающая стоимость самого дешевого пути от текущего состояния до цели. A * завершается, когда путь, который он выбирает для продолжения, является путем от начала до цели, или если нет путей, которые можно было бы продолжить.Эвристическая функция зависит от задачи. Если эвристическая функция допустима, что означает, что она никогда не переоценивает фактическую стоимость достижения цели, A * гарантированно вернет путь с наименьшими затратами от начала до цели. В следующих разделах описывается, как построен график A *, его функция стоимости и эвристика.
5.2. Модель перехода
Дискретизированная модель перехода может быть записана какxi + 1 = si + 1vi + 1ti + 1 = 1Δt000100001Δtsiviti1 + 12 (Δt) 2Δt0ai
(25)
где ai относится к действию, которое выбирается на шаге i и раскрывается для Δt.(25) представляет продольное движение автомобиля эго. Цель планирования — найти набор xi в графе ациклического поиска. Чтобы сократить время вычислений, мы дискретизируем пространство действий. Используя дискретизированное пространство действий, состояние xi расширяется, чтобы достичь целевого состояния xG. В это время создается граф поиска, затем мы выбираем состояние минимальной стоимости из следующих состояний. Этот процесс повторяется до тех пор, пока состояние xi не достигнет xG.5.3. Функция стоимости
g (xi, a, xi + 1, E) — это стоимость шага в состоянии xi для перехода в состояние xi + 1 для выполнения действия a.Общая стоимость — это совокупная стоимость всех шагов на пути, ∑xi = xstartxgoalg (xi, a, xi + 1, E). Цель состоит в том, чтобы найти путь от начального состояния к целевому состоянию, требующий минимальных затрат. Чтобы представить различные параметры задачи оптимизации, в качестве стоп-стоимости используется взвешенная сумма различных затрат.
Цель состоит в том, чтобы найти путь от начального состояния к целевому состоянию, требующий минимальных затрат. Чтобы представить различные параметры задачи оптимизации, в качестве стоп-стоимости используется взвешенная сумма различных затрат.g (xi, a, xi + 1, E) = ωV · gV (si + 1) + ωA · gA (a) + ωE · gE (xi, xi + 1, E)
(26)
где gV (xi + 1) относится к стоимости желаемой скорости, gA (a) обозначает стоимость выполнения действия a, а gE (xi, xi + 1, E) — стоимость столкновения во время движения из xi в xi + 1.Кроме того, ωV, ωA и ωE являются весовыми коэффициентами для желаемой скорости, ускорения и столкновения соответственно. В следующих разделах приводится формулировка каждой функции стоимости.5.3.1. Стоимость скорости
vdes (s) является функцией желаемой скорости в позиции s без препятствий. Эта скорость объединяет ограничение скорости vlaw (s) и vcurve (s) на длине пути s. vcurve формулируется в соответствии с максимально допустимым поперечным ускорением alat, кривой радиуса кривизны rcurve (s), записанной в [28].
vcurve (s) = alat, curvercurve (s)
(27)
Тогда желаемая скорость — это минимум vlaw и vcurve, как показано на рисунке 6. Мы установили ограничение скорости на стоянке ниже 15 км / ч, а максимально допустимое боковое ускорение составляет 2 м / с 2. Скорость Стоимость gV получается как разница с желаемой скоростью vdes. Слишком высокая скорость наказывается квадратично, в то время как слишком низкая скорость наказывается линейно, чтобы обеспечить более низкую скорость при замедлении на препятствиях. Тогда gV (xi + 1) можно записать следующим образом: gV (xi + 1) = (vi + 1 − vdes (si + 1)) 2, vi + 1> vdes (si + 1) 0, vi + 1 = vdes (si + 1) 12 (vdes (si + 1 ) −vdes) 2, vi + 1 (28) Использование стоимости ускорения или большого значения весового коэффициента ускорения обеспечивает комфортное вождение. gE (xi, xi + 1, E) = ∞, если Ei∈E: xi + 1∈EiMEi (xi + 1), если Ei∈E: xi + 1∈Ei0, иначе (30) ddesEi = dthreshold + vego · tgap (31) MEi = ddesEi − dEi, еслиdEi (32) ∀a∈A∃Ei∈E: {si + vi · t + 12a · t2 | t∈ [0∞]} ≠ ∅ (33) (34) Исходный алгоритм A * имеет конкретную цель в построенном графе. Поскольку мы строим график онлайн, цель может быть достигнута, а может и нет. Как и в первом сценарии, эго-транспортное средство перемещается по стоянке с большим количеством припаркованных транспортных средств. Разница в том, что велосипедист внезапно выскакивает из-за припаркованного автомобиля через несколько секунд. Эго-транспортное средство не может обнаружить велосипедиста из-за окклюзии.Этот сценарий оценивает возможности модели, когда препятствие выскакивает из печатной платы. В этом сценарии на печатной плате обнаруживается ненаблюдаемое препятствие, после чего оно преобразуется в наблюдаемое препятствие. В данной статье представлен алгоритм безопасного планирования движения в условиях ограниченной видимости на стоянке. Предлагаемый алгоритм состоит из трех этапов: оценка потенциальной границы столкновения (PCB), прогнозирование движения на основе оценки достижимого множества и планирование движения с A *.Чтобы учесть, что видимость ограничена окклюзиями, мы определили печатную плату, чтобы описать риск ненаблюдаемых препятствий. Применяя оценку набора достижимости в качестве прогнозирования движения, PCB расширяется до достижимой области, как только определено, что существует ненаблюдаемое препятствие. За счет чрезмерного приближения оценка множества достижимости представляет собой наихудший случай ненаблюдаемых препятствий. Затем мы переписываем набор достижимости, чтобы включить состояние пространства планирования, чтобы простая модель представления могла преобразовать набор достижимости в препятствия в алгоритме A *. Результаты моделирования показывают способность алгоритма генерировать оптимальный профиль скорости для ненаблюдаемых препятствий.Благодаря предложенному алгоритму транспортное средство могло двигаться в закрытой зоне без столкновений. Поскольку мы улучшили набор достижимости, используя завышенные приближения, мы смогли подтвердить, что планировщик спланировал безопасные профили скорости. Производительность отображается в сценариях роуминга с заглушками от припаркованных автомобилей. Все столкновения можно предотвратить, продолжая движение по стоянке с достаточной скоростью. Концептуализация, S.L., W.L., M.S. и K.J .; методология, С.Л. и W.L .; программное обеспечение, S.L .; валидация, S.L .; формальный анализ, С.Л .; расследование, S.L., W.L., M.S. и K.J .; ресурсы, S.L .; курирование данных, S.L .; письменность — оригинальная черновая подготовка, С.Л., В.Л., М.С. Эта работа финансировалась Программой развития технологий промышленной стратегии (№ 10039673, 10079961), Международной программой совместных исследований и разработок (N0001992) при Министерстве торговли, промышленности и энергетики (MOTIE Корея) и Грант Национального исследовательского фонда Кореи (NRF), финансируемый правительством Кореи (MEST) (No.2011-0017495). Не применимо. Не применимо. Совместное использование данных не применяется. Авторы заявляют об отсутствии конфликта интересов. Рисунок 1. Общая архитектура планирования движения с учетом ограниченной видимости. Рисунок 1. Общая архитектура планирования движения с учетом ограниченной видимости. Рисунок 2. Область, классифицированная границей окклюзии. Рисунок 2. Область, классифицированная границей окклюзии. Рисунок 3. Шаги по оценке потенциальной границы столкновения на основе точек-кандидатов. Рисунок 3. Шаги по оценке потенциальной границы столкновения на основе точек-кандидатов. Рисунок 4. Обозначения для обозначения потенциальной границы столкновения. Рисунок 4. Обозначения для обозначения потенциальной границы столкновения. Рисунок 5. Завышенные приближения занятости для начальных интервалов. Рисунок 5. Завышенное приближение занятости для начальных интервалов. Рисунок 6. На пути скорость ограничена предельной скоростью и кривизной.Скорость подвода к кривой является частью желаемой скорости. Рисунок 6. На пути скорость ограничена предельной скоростью и кривизной. Скорость подвода к кривой является частью желаемой скорости. Рисунок 7. Представление препятствий в дистанционно-временной области. Рисунок 7. Представление препятствий в дистанционно-временной области. Рисунок 8. Аналитический расчет состояния неизбежного столкновения. Рисунок 8. Аналитический расчет состояния неизбежного столкновения. Рисунок 9. Описание сценария. Рисунок 9. Описание сценария. Рисунок 10. Роуминг на парковке без препятствий. Верхний рисунок каждого временного шага показывает ситуацию в CARLA. На втором рисунке описан алгоритм в платформе ROS. На последнем рисунке показан профиль скорости на каждом временном шаге. Рисунок 10. Роуминг на парковке без препятствий. Верхний рисунок каждого временного шага показывает ситуацию в CARLA. Рисунок 11. Роуминг на стоянке с препятствиями. Верхний рисунок каждого временного шага показывает ситуацию в CARLA. На втором рисунке описан алгоритм в платформе ROS. На последнем рисунке показан профиль скорости на каждом временном шаге. Рисунок 11. Роуминг на стоянке с препятствиями. Верхний рисунок каждого временного шага показывает ситуацию в CARLA. На втором рисунке описан алгоритм в платформе ROS. На последнем рисунке показан профиль скорости на каждом временном шаге. Примечание издателя: MDPI сохраняет нейтралитет в отношении юрисдикционных претензий на опубликованных картах и филиалов организаций. Водителю не всегда удается проехать в солнечную сухую погоду. Езда в тумане, крутые повороты, во время дождя или снегопада, ночью — все это условия видимости, которые по Правилам дорожного движения имеют свои индивидуальные названия.Что означает термин «ограниченная видимость»? Как правильно передвигаться на транспортном средстве в таких условиях — разберем подробнее. Каждый водитель, проходя обучение в автошколе, знакомился с этим понятием. Так что же означает этот термин? Ограниченная видимость — это вид водителя на проезжую часть в направлении движения, ограниченный особенностями местности, зелеными насаждениями, архитектурными сооружениями или другими объектами, включая другие транспортные средства.Другими словами, человек, управляющий автомобилем, не может оценить ситуацию на дороге. Правила дорожного движения не указывают точные метражи ограниченной видимости. Правила дорожного движения описывают все ситуации, которые могут возникнуть на проезжей части. Для освежения памяти: запрещенные на дороге маневры в условиях ограниченной видимости: Для обеспечения безопасности на проезжей части в условиях плохой видимости водитель должен быть максимально осторожным. Чем хуже вид, тем более осторожным должен быть человек, управляющий транспортным средством. А выбор скорости движения напрямую зависит от условий видимости. Что означает термин «ограниченная видимость» — знает каждый опытный водитель. Но его очень легко спутать с понятием «недостаточный».Часто такую ошибку допускают студенты автошкол на выпускных экзаменах. Не забывайте о культуре поведения на проезжей части. При движении в условиях плохой видимости у водителей есть неписаное правило — приближаясь к другой машине, вместо дальнего света включайте ближний свет.Так вы не ослепите человека за рулем встречного транспорта. Поверенный по дорожно-транспортным происшествиям с ограниченной видимостью в Нью-Йорке может быть нанят пострадавшим после того, как произошло ДТП, причиной которого, по мнению потерпевшего, являются плохие навыки вождения или способность обращать внимание. Ограниченная видимость может повлиять на водителей всех категорий, в том числе на мотоциклах. Однако из-за пониженного уровня защиты, которую имеют мотоциклисты, поскольку у них нет лобового стекла или дворников, ограниченная видимость может стать серьезной проблемой. В этих авариях виновный может даже не оставаться на месте происшествия. Они могут не знать, во что они ударились, испугаться и уйти. Это называется несчастным случаем наезда и сбегает, и это незаконно, но все же происходит. Многие мотоциклисты вообще не выезжают на дорогу в условиях ограниченной видимости. Погодные условия могут быстро адаптироваться, и это может стать смертельной поездкой для мотоциклиста.Мотоциклист, который упорствует, несмотря на серьезные проблемы с видимостью, может оказаться привлеченным к ответственности в судебном иске о мотоциклетной аварии. Пострадавший может вызвать юриста по авариям на мотоциклах с ограниченной видимостью в Нью-Йорке для получения компенсации за оплату медицинских счетов и других расходов в результате аварии. Все должны быть внимательны на дороге, потому что внезапная авария может привести к серьезным проблемам. Когда другой водитель не корректирует курс или съезжает с дороги из-за ограниченной видимости, он подвергает риску только себя, но всех остальных на дороге опасность серьезной аварии. Условия ограниченной видимости всегда должны побуждать водителей оценивать, безопасно ли продолжать движение и как использовать дополнительные механизмы, такие как противотуманные фары, чтобы решить проблемы. Когда другой водитель заявляет, что причиной аварии была ограниченная видимость, необходимо привлечь подходящего юриста по авариям на мотоциклах с ограниченной видимостью в Нью-Йорке, чтобы оценить причины аварии и определить возможные ответственные стороны.Один только этот шаг может помочь свести к минимуму стресс и беспокойство, которые жертва испытывает в настоящее время после катастрофического дорожно-транспортного происшествия. Принимая во внимание множество уникальных факторов, жертва должна изучить все варианты, прежде чем выносить решение о привлечении к ответственности в суде. Без четкого обзора дороги, чтобы увидеть потенциально опасные ситуации и оценить меняющиеся условия, вы, по сути, ведете машину вслепую.Водители получают большой объем информации, находясь за рулем, и для того, чтобы справиться с потоком деталей, требуется концентрация и хорошее представление о том, что вас окружает. Это не проблема, если только ваша видимость не ограничена. Это не удивительная новость, тем не менее, многие из нас водят машину с мертвыми зонами размером с McMansions, парящими вокруг наших машин, что ставит под угрозу безопасность и увеличивает вероятность аварии. Измените свое мировоззрение с помощью этих пяти способов улучшить видимость во время вождения. Работа в условиях ограниченной видимости чрезвычайно опасна. Будьте в курсе Лучшая защита для вас и вашей команды — постоянно быть в курсе того, как вы можете держать свою команду на виду в условиях плохой видимости. Эксперты Bulwark Protection PPE предоставляют широкий спектр инструментов и ресурсов о том, как правильно выбрать СИЗ, а также советы о том, как правильно реализовать программу безопасности. ОСТАВАЙТЕСЬ В БЕЗОПАСНОСТИ Bulwark Protection предлагает широкий ассортимент хорошо заметной одежды, которая не только помогает увидеть ваших рабочих, но и обеспечивает удобную посадку в любой рабочей среде. Свяжитесь с торговым представителем Bulwark Protection, чтобы узнать больше о наших продуктах. Независимо от того, нужна ли вам помощь в поиске определенного товара или сортировке среди множества стандартов, мы будем работать с вами, чтобы разработать программу одежды FR / AR, которая позволит вам создать культуру соответствия. Бесплатная доставка наземным транспортом при заказах на сумму более 75 долларов США для покупок в США Snapship теперь доступен для некоторых предметов в Dive Right In Scuba.Когда вы увидите логотип SnapShip, мы ускорим и отправим ваш заказ с бесплатной двухдневной доставкой в континентальной части США! Ищите логотип и получайте товары в кратчайшие сроки! У нас также одни из лучших сроков доставки в стране! Расположение в центре США дает нам преимущество. — Бесплатная доставка НЕ действительна для товаров со скидкой, за исключением случаев, когда общее количество не распродажных товаров превышает 75 долларов. Dive Right In Scuba Бесплатная доставка будет применяться к стандартной наземной доставке в нижних 48 штатах при любом заказе на общую сумму 75 долларов США и более (за исключением резервуаров и компрессоров).Если вы решите воспользоваться ускоренной доставкой, вам будет начислена плата за обычную наземную доставку, а разница будет выплачена только ускоренной доставке. Вы увидите опцию «Бесплатная доставка», если вы выберете ускоренную доставку, вы увидите обычную сумму доставки наземным транспортом, и, прежде чем мы снимем средства с вашей карты, мы добавим ваш кредит на бесплатную доставку и скорректируем расходы. Если вы вернете товар, вам не вернут деньги за бесплатную доставку. Для обмена продукта другого цвета, размера или кредита магазина вы можете просто отправить свою покупку обратно в Dive Right In Scuba (за ваш счет), и мы отправим вам новый продукт (за наш счет) или передадим вам кредит магазина при получении товара.* Не включая международные заказы * Не включая несколько возвратов / обменов Вы заметите, что при выборе вариантов доставки вам будет предоставлено ETA прибытия для указанной доставки, которую вы решите использовать. Если у вас есть какие-либо вопросы или вам нужна помощь в выборе способа доставки, который лучше всего подходит для своевременной доставки вашего продукта, пожалуйста, позвоните нам по телефону (815) 267-8400, и мы поможем вам получить посылку вовремя. . При отправке продукта вам будет предоставлен номер для отслеживания, чтобы вы могли отслеживать статус своих новых продуктов.Помните, что UPS не учитывает выходные дни в сроках доставки. Не стесняйтесь звонить в Dive Right In Scuba, если вы хотите убедиться, что у нас есть ваш продукт на складе. Мы стараемся, чтобы все товары были в наличии, но, как бы мы ни старались, иногда товар заканчивается. Мы сделаем все, что в наших силах, чтобы ваша продукция прибыла вовремя для поездки или погружения, а также чтобы предоставить вам услуги, которых вы заслуживаете. * Обратите внимание, что если вы получите бесплатную доставку и вернете товар, стоимость доставки будет вычтена из вашего счета на возврат.* Международные заказы Бесплатная наземная доставка при заказах на сумму более 500 долларов США У нас одни из лучших сроков доставки в мире! Расположение в центре США дает нам преимущество. Большинство заказов доставляются к вашей двери со стандартной доставкой менее чем за 10 дней !! У большинства других розничных продавцов вам придется платить дополнительные расходы по доставке, чтобы доставить товар так быстро. * Ваши товары будут отправлены застрахованными, и вы можете оплатить некоторые импортные пошлины и налоги в зависимости от вашего местного правительства. Утерянные посылки могут быть заменены только после того, как USPS или UPS произведут оплату за утерянные предметы.Вот почему мы рекомендуем доставку с помощью UPS для отслеживания и более быстрого погашения. На сегодняшний день мы не потеряли ни одной посылки, но кое-что может случиться. Вы заметите, что при выборе вариантов доставки вам будет предоставлено ETA прибытия для указанной доставки, которую вы решите осуществить. Если у вас есть какие-либо вопросы или вам нужна помощь в выборе способа доставки, который лучше всего подходит для своевременной доставки вашего продукта, пожалуйста, позвоните нам по телефону (815) 267-8400, и мы поможем вам получить посылку вовремя. . При отправке продукта вам будет предоставлен номер для отслеживания, чтобы вы могли отслеживать статус своих новых продуктов. Помните, что UPS не учитывает выходные дни в сроках доставки. Не стесняйтесь звонить в Dive Right In Scuba, если вы хотите убедиться, что у нас есть ваш продукт на складе. Мы стараемся, чтобы все товары были в наличии, но, как бы мы ни старались, иногда товар заканчивается. Мы сделаем все, что в наших силах, чтобы ваша продукция прибыла вовремя для поездки или погружения, а также чтобы предоставить вам услуги, которых вы заслуживаете. Спасибо за вашу поддержку !! Подводное плавание с аквалангом Dive Right In Scuba, ваш главный магазин для дайвинга в Иллинойсе, который работает для вас, где бы вы ни находились, по всему миру! Зимняя погода влияет на большинство водителей.По данным Федерального управления шоссейных дорог, более 70% дорог в США расположены в регионах, где ежегодно выпадает более пяти дюймов снега. Это имеет серьезные последствия; ежегодно более 1300 человек погибают в автокатастрофах на заснеженных, обледенелых или мокрых дорогах. Еще 116 800 человек получили травмы в результате этих зимних бедствий. Как менеджер автопарка, вы хотите обеспечить безопасность как ваших водителей, так и водителей вокруг них. Вот почему так важно напоминать водителям об опасностях зимы и рассказывать им, как справляться с изменяющимися зимними дорожными условиями. В самые холодные месяцы ваши водители столкнутся с повышенным трафиком в праздничные дни, сокращением светового дня и непредсказуемой погодой, которая может стать смертельной за считанные минуты. Давайте посмотрим на пять общих проблем, с которыми они могут столкнуться этой зимой: Снег на дороге резко снижает способность водителя тормозить или маневрировать. Снежные дороги также могут скрывать участки льда, что еще больше снижает управляемость водителя.Области, где дорога поворачивается и водители не видят, что впереди, еще сложнее, потому что они дают меньше времени водителям на реакцию, если они столкнутся со снегом или льдом. Видимость становится проблемой зимой по нескольким причинам. Помимо недостаточного дневного света, проблему также могут усугубить мокрый снег, дождь, снегопад и грязные или запотевшие окна. Обледенелые дороги — одна из самых серьезных опасностей при вождении зимой, а гололед особенно опасен.Черный лед обычно образуется, когда температура поднимается выше нуля в течение дня, позволяя снегу таять и образовывать лужи. Когда вечером температура падает, вода замерзает и образует тонкий слой прозрачного льда. (Его называют черным льдом, потому что он кажется того же цвета, что и тротуар.) Черный лед часто встречается на мостах или под эстакадами, поэтому водителям следует проявлять особую осторожность, путешествуя по этим районам в зимние месяцы. Жилые дороги могут преподнести всевозможные неприятные сюрпризы.В большинстве случаев эти дороги с меньшей проходимостью не обрабатывались дорожной солью. Из-за этого, а также из-за того, что у них меньше трафика, снег и лед могут скапливаться легче. Некоторые особо опасные места, на которые следует обратить внимание, включают подъездные пути, парковки и сельские дороги. Сцепление необходимо для правильного управления автомобилем, и большинство обсуждаемых здесь условий способствуют снижению тяги. При недостаточном сцеплении колеса транспортного средства могут пробуксовывать, а водители теряют контроль, скользят и / или не могут эффективно тормозить.Наличие времени для принятия правильного решения о вождении имеет решающее значение для безопасного выхода из этих опасных ситуаций. Чтобы оставаться в безопасности на обледенелых или заснеженных дорогах, необходимо знать, как условия влияют на автомобиль и что водители могут сделать, чтобы минимизировать опасность. Водители, которые сталкиваются с такими проблемами, как снижение тяги, ограниченная видимость и дороги, покрытые снегом или льдом, должны снизить скорость и постоянно следить за своим окружением. Они должны поддерживать расстояние не менее шести секунд между своим автомобилем и автомобилем впереди них и избегать резких торможений или смены полосы движения в зимнюю погоду. Водители должны следить за движением глаз и проверять зеркала каждые пять-восемь секунд, чтобы своевременно обнаруживать угрозы сбоку и сзади. Предоставляя пространство для маневрирования своего автомобиля вдали от потенциальных проблем, водители с большей вероятностью смогут избежать аварий или других проблем, оставив себя в стороне. Более низкая скорость дает им время, чтобы отреагировать на сложные дорожные условия и определить, каким будет их лучший ход.Чем быстрее меняется погодная ситуация, тем важнее, чтобы у водителей было время и пространство, чтобы отреагировать на нее. Когда условия становятся слишком опасными, водителям лучше сделать перерыв, пока дороги не станут безопаснее. Эти важные шаги к более безопасному вождению зимой также являются критически важными компонентами принципов Smith5Keys®, столпов обучения водителей по системе Smith System. Даже профессиональным водителям нужно напоминать о дополнительных проблемах, с которыми они сталкиваются зимой.Это поможет обеспечить безопасность на первом месте каждый раз, когда они садятся за руль. Хотя во время вождения важно чувствовать себя в безопасности и уверенно, не менее важно не проявлять излишней уверенности в суровых погодных условиях. Вера в то, что хорошие навыки вождения могут компенсировать плохую погоду, является опасной игрой, поэтому убедитесь, что ваши водители знают, что поддержание их безопасности — и безопасности водителей вокруг них — всегда является их главным приоритетом. Безопасное вождение начинается задолго до того, как водитель сядет за руль.Водители должны иметь в своем автомобиле цепи противоскольжения, небольшую лопату, сигнальные ракеты и щётку для льда, чтобы быть готовыми к изменению условий. 5.3.2. Стоимость ускорения
Стоимость действий зависит от значения ускорения a. Целью затрат на ускорение является наказание за слишком высокое или слишком низкое ускорение и поддержание текущего ускорения. Здесь gA (a) записывается следующим образом:
5.3.3. Стоимость столкновения
Эго-транспортное средство может встречаться с наблюдаемыми и ненаблюдаемыми препятствиями, такими как транспортные средства и пешеходы.Поэтому идея состоит в том, чтобы построить простое представление препятствий, которое включает представление любого возможного возникновения в продольном направлении. Препятствие Ei пересекает путь в позиции s (t) в интервале времени τ∈ [tstart ,tend], тогда препятствие Ei имеет длину lEi. Препятствие также имеет желаемое расстояние ddesEi следования, которое определяется как карта затрат MEi во времени и пространстве, необходимая для достижения плавного вождения. Карта затрат MEi является линейной функцией, использующей представление препятствий Ei = (sEi (t), ddesEi, lEi, tstart ,tend).Эта карта проиллюстрирована на рисунке 7. Стоимость столкновения может быть получена как Через время, пересекающее набор достижимости и предопределенный путь, мы можем определить tstartEi иtendEi, а расстояние пересечения затем описывает положение препятствия. Желаемое расстояние следования для ненаблюдаемого препятствия может быть впоследствии вычислено таким же образом, как и для наблюдаемого препятствия.
Через время, пересекающее набор достижимости и предопределенный путь, мы можем определить tstartEi иtendEi, а расстояние пересечения затем описывает положение препятствия. Желаемое расстояние следования для ненаблюдаемого препятствия может быть впоследствии вычислено таким же образом, как и для наблюдаемого препятствия. 5.4. Эвристика
Соответствующая и последовательная эвристическая стоимость может сократить вычисление алгоритма A *. Здесь мы используем неизбежные коллизионные состояния (ICS) [29] в качестве эвристической стоимости.ICS — это состояние, которое не может избежать хотя бы одной коллизии в будущем. Когда новое состояние расширяется, это состояние проверяется на предмет того, является ли новое состояние ICS. Если это так, то есть новое состояние не может избежать столкновения, оставшаяся эвристическая стоимость hx, i является максимальной стоимостью столкновения. С помощью ICS планировщик учитывает допустимые реакции на приближающиеся препятствия. В случае движения в одномерном направлении тест ICS можно легко провести аналитически. Тест ICS для вновь созданного состояния xi может быть получен как
Когда новое состояние расширяется, это состояние проверяется на предмет того, является ли новое состояние ICS. Если это так, то есть новое состояние не может избежать столкновения, оставшаяся эвристическая стоимость hx, i является максимальной стоимостью столкновения. С помощью ICS планировщик учитывает допустимые реакции на приближающиеся препятствия. В случае движения в одномерном направлении тест ICS можно легко провести аналитически. Тест ICS для вновь созданного состояния xi может быть получен как 5.5. Цели
 Поэтому мы ставим частичную цель во временной области tG. Независимо от того, где находится транспортное средство или его скорость, планировщик перестает находить профиль скорости, когда время состояния ti достигает tG.
Поэтому мы ставим частичную цель во временной области tG. Независимо от того, где находится транспортное средство или его скорость, планировщик перестает находить профиль скорости, когда время состояния ti достигает tG. 6. Результаты моделирования
Мы оценили предложенный алгоритм, используя два сценария, как показано на рисунке 9. Первый сценарий включает роуминг эго-транспортного средства на стоянке, где существуют припаркованные автомобили. Исходя из этого сценария, предлагаемый метод показывает способность безопасно управлять автомобилем в условиях ограниченной видимости. Второй сценарий включает в себя велосипедиста, который выскакивает из границы потенциального столкновения. Во втором сценарии будет доказана безопасность предложенного алгоритма. Тесты проводятся с использованием платформы Robot Operating System (ROS) [30] в симуляторе CARLA [31].Предложенный алгоритм был реализован на компьютере i5 Core на языке C ++. Периоды выполнения общего процесса планирования составляли 100 мс.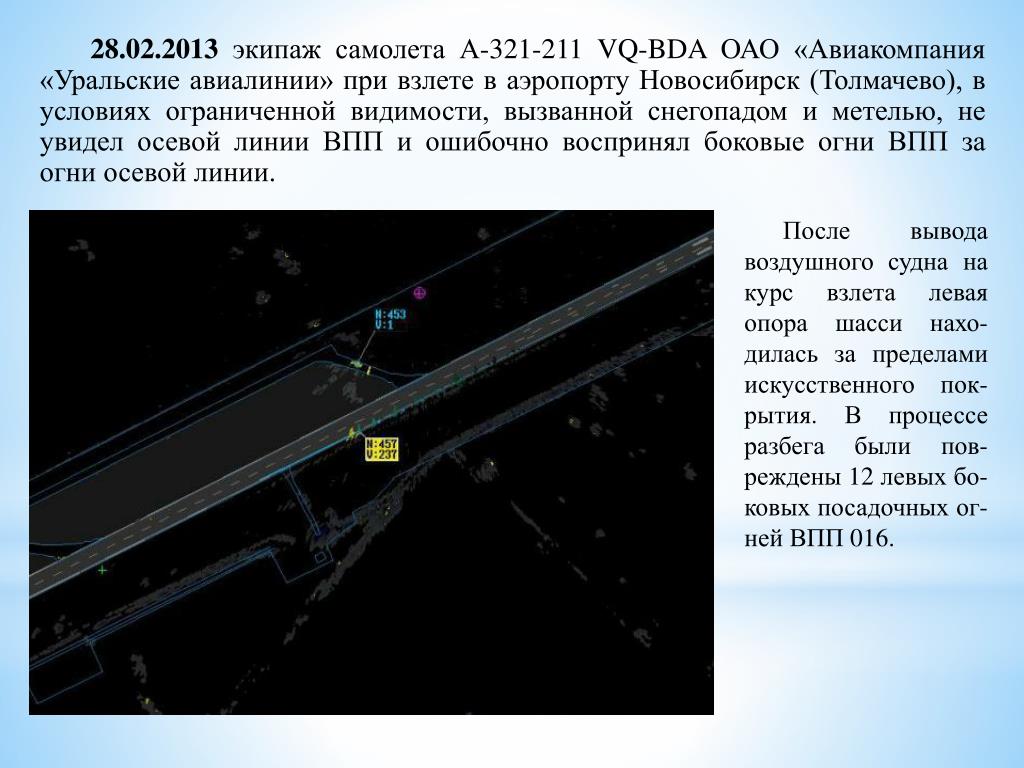 Общий горизонт планирования составлял 5 с, а временной шаг — 0,5 с.
Общий горизонт планирования составлял 5 с, а временной шаг — 0,5 с. 6.1. Сценарий 1: Роуминг на стоянке без препятствий
В качестве первого онлайн-сценария представлен роуминг на стоянке. Автомобиль эго бродит по парковке с множеством припаркованных автомобилей. Эго-транспортное средство должно учитывать ненаблюдаемые препятствия, которые внезапно возникают между припаркованными автомобилями.Другими словами, эго-транспортное средство должно учитывать неопределенный прогноз ненаблюдаемых препятствий, который реализуется посредством оценки набора достижимости. Эта неопределенность учитывается путем оценки набора достижимости в разделе 4. На рисунке 10a в качестве элемента управления с предложенным алгоритмом можно увидеть, как эго-транспортное средство едет по парковке без других припаркованных транспортных средств. С другой стороны, на рисунке 10 показан процесс роуминга на парковке. На каждом рисунке рисунка 10b – d верхний рисунок показывает изображение передней камеры эго-транспортного средства. На среднем рисунке описаны детали алгоритма в платформе ROS. На этом рисунке зеленые точки — это облако точек, а красные линии — границы потенциальных столкновений (PCB). На нижнем рисунке показан набор предполагаемой достижимости в виде красного многоугольника и профиль скорости, сгенерированный предложенным алгоритмом. Эго-транспортное средство генерирует профиль скорости в соответствии с регулируемой скоростью, описанной синей линией на нижнем рисунке на рисунке 10a, если существует риск ограниченная видимость не существует. Напротив, при t = 0 (см. Рисунок 10b) эго-транспортное средство движется к пустому месту для парковки без видимых препятствий.Эго-транспортное средство пытается создать профиль скорости, чтобы поддерживать регулируемую скорость. Однако эго-транспортное средство не может разогнаться до тех пор, пока не достигнет регулируемой скорости, потому что при ускорении оно сталкивается с невидимыми препятствиями. В это время прогнозирование ненаблюдаемых препятствий осуществляется путем оценки набора достижимости, как показано красным многоугольником на нижнем рисунке рисунка 10b – d.
На среднем рисунке описаны детали алгоритма в платформе ROS. На этом рисунке зеленые точки — это облако точек, а красные линии — границы потенциальных столкновений (PCB). На нижнем рисунке показан набор предполагаемой достижимости в виде красного многоугольника и профиль скорости, сгенерированный предложенным алгоритмом. Эго-транспортное средство генерирует профиль скорости в соответствии с регулируемой скоростью, описанной синей линией на нижнем рисунке на рисунке 10a, если существует риск ограниченная видимость не существует. Напротив, при t = 0 (см. Рисунок 10b) эго-транспортное средство движется к пустому месту для парковки без видимых препятствий.Эго-транспортное средство пытается создать профиль скорости, чтобы поддерживать регулируемую скорость. Однако эго-транспортное средство не может разогнаться до тех пор, пока не достигнет регулируемой скорости, потому что при ускорении оно сталкивается с невидимыми препятствиями. В это время прогнозирование ненаблюдаемых препятствий осуществляется путем оценки набора достижимости, как показано красным многоугольником на нижнем рисунке рисунка 10b – d. Набор достижимости преобразуется в область расстояния-времени с красным многоугольником на нижнем рисунке. Затем эго-транспортное средство непрерывно замедляется, пока поле обзора не станет достаточно большим, чтобы исключить печатные платы.Поскольку парковки недостаточно для обеспечения видимости из-за припаркованных транспортных средств, эго-транспортное средство поддерживает более низкую скорость, чем предписано во время роуминга. (см. рисунок 10b – d).
Набор достижимости преобразуется в область расстояния-времени с красным многоугольником на нижнем рисунке. Затем эго-транспортное средство непрерывно замедляется, пока поле обзора не станет достаточно большим, чтобы исключить печатные платы.Поскольку парковки недостаточно для обеспечения видимости из-за припаркованных транспортных средств, эго-транспортное средство поддерживает более низкую скорость, чем предписано во время роуминга. (см. рисунок 10b – d). 6.2. Сценарий 2: Роуминг на стоянке с препятствиями
 Следовательно, предлагаемый алгоритм подчеркивает его масштабируемость для всех типов препятствий (ненаблюдаемых и наблюдаемых).
Следовательно, предлагаемый алгоритм подчеркивает его масштабируемость для всех типов препятствий (ненаблюдаемых и наблюдаемых). Более того, стоимостные и эвристические функции управляемого алгоритма A * гарантированно учитывают как наблюдаемые, так и ненаблюдаемые препятствия.
Более того, стоимостные и эвристические функции управляемого алгоритма A * гарантированно учитывают как наблюдаемые, так и ненаблюдаемые препятствия. 7. Выводы
 Таким образом, мы используем алгоритм A * в качестве планировщика движения для достижения полноты, оптимальности и оптимальной эффективности. Используя этот алгоритм, мы можем сформулировать функцию стоимости, чтобы гарантировать, что транспортное средство движется с желаемой скоростью, обеспечивает комфортное вождение и избегает столкновений. Кроме того, к эвристической функции применяется состояние неизбежного столкновения (ICS), чтобы уменьшить вычислительную нагрузку.
Таким образом, мы используем алгоритм A * в качестве планировщика движения для достижения полноты, оптимальности и оптимальной эффективности. Используя этот алгоритм, мы можем сформулировать функцию стоимости, чтобы гарантировать, что транспортное средство движется с желаемой скоростью, обеспечивает комфортное вождение и избегает столкновений. Кроме того, к эвристической функции применяется состояние неизбежного столкновения (ICS), чтобы уменьшить вычислительную нагрузку. Предлагаемый планировщик может проактивно приспосабливаться к ненаблюдаемым препятствиям, используя один алгоритм оптимизированным образом, путем решения задачи оптимизации.
Предлагаемый планировщик может проактивно приспосабливаться к ненаблюдаемым препятствиям, используя один алгоритм оптимизированным образом, путем решения задачи оптимизации. Другими словами, мы решили проблему, уменьшив или увеличив скорость. Однако в более сложных ситуациях, таких как пересечение перекрестка на парковке, ожидание припаркованного автомобиля или встреча с автомобилем в узком переулке, планировщик должен изменить путь в сторону. Поэтому следует учитывать как продольное, так и поперечное направление траектории. Считать боковое направление; однако сложная ситуация будет разделена на нормальное состояние и неизбежное состояние.Нормальное состояние относится к проблеме, описанной в разделе 3, тогда как неизбежное состояние указывает на сложную ситуацию, упомянутую выше. К разным типам проблем следует применять разные методы.
Другими словами, мы решили проблему, уменьшив или увеличив скорость. Однако в более сложных ситуациях, таких как пересечение перекрестка на парковке, ожидание припаркованного автомобиля или встреча с автомобилем в узком переулке, планировщик должен изменить путь в сторону. Поэтому следует учитывать как продольное, так и поперечное направление траектории. Считать боковое направление; однако сложная ситуация будет разделена на нормальное состояние и неизбежное состояние.Нормальное состояние относится к проблеме, описанной в разделе 3, тогда как неизбежное состояние указывает на сложную ситуацию, упомянутую выше. К разным типам проблем следует применять разные методы. Вклад авторов
 и K.J .; написание — просмотр и редактирование, С.Л .; визуализация, С.Л .; надзор, С.Л .; администрация проекта, K.J .; привлечение финансирования, M.S. Все авторы прочитали и согласились с опубликованной версией рукописи.
и K.J .; написание — просмотр и редактирование, С.Л .; визуализация, С.Л .; надзор, С.Л .; администрация проекта, K.J .; привлечение финансирования, M.S. Все авторы прочитали и согласились с опубликованной версией рукописи. Финансирование
Заявление институционального наблюдательного совета
Заявление об информированном согласии
Заявление о доступности данных
Конфликт интересов
Литература
 «> Kotb, A.O .; Shen, Y.C .; Хуанг Ю. Умное руководство по парковке, мониторинг и бронирование: обзор. IEEE Intell. Трансп.Syst. Mag. 2017 , 9, 6–16. [Google Scholar] [CrossRef]
«> Kotb, A.O .; Shen, Y.C .; Хуанг Ю. Умное руководство по парковке, мониторинг и бронирование: обзор. IEEE Intell. Трансп.Syst. Mag. 2017 , 9, 6–16. [Google Scholar] [CrossRef] ).
). «> Kuwata, Y .; Fiore, G.A .; Teo, J .; Frazzoli, E .; Как, J.P. Планирование движения для городского вождения с использованием RRT. В материалах Международной конференции IEEE / RSJ 2008 г. по интеллектуальным роботам и системам, Ницца, Франция, 22–26 сентября 2008 г .; С. 1681–1686. [Google Scholar] [CrossRef]
«> Kuwata, Y .; Fiore, G.A .; Teo, J .; Frazzoli, E .; Как, J.P. Планирование движения для городского вождения с использованием RRT. В материалах Международной конференции IEEE / RSJ 2008 г. по интеллектуальным роботам и системам, Ницца, Франция, 22–26 сентября 2008 г .; С. 1681–1686. [Google Scholar] [CrossRef] Control Syst. Technol. 2007 , 15, 566–580. [Google Scholar] [CrossRef]
Control Syst. Technol. 2007 , 15, 566–580. [Google Scholar] [CrossRef] «> McGill, S.G .; Росман, Г .; Орт, Т .; Пирсон, А .; Гилищенский, И .; Араки, Б .; Fletcher, L .; Караман, С .; Русь, Д .; Леонард, Дж. Дж. Вероятностные показатели риска для навигации по перекрытым перекресткам. Робот IEEE. Автомат. Lett. 2019 , 4.[Google Scholar] [CrossRef]
«> McGill, S.G .; Росман, Г .; Орт, Т .; Пирсон, А .; Гилищенский, И .; Араки, Б .; Fletcher, L .; Караман, С .; Русь, Д .; Леонард, Дж. Дж. Вероятностные показатели риска для навигации по перекрытым перекресткам. Робот IEEE. Автомат. Lett. 2019 , 4.[Google Scholar] [CrossRef] [Google Scholar] [CrossRef]
[Google Scholar] [CrossRef] , Мауи, Гавайи, США, 4–7 ноября 2018 г .; стр.2419–2425. [Google Scholar] [CrossRef]
, Мауи, Гавайи, США, 4–7 ноября 2018 г .; стр.2419–2425. [Google Scholar] [CrossRef] «> Russell, S .; Норвинг, П. Искусственный интеллект: современный подход, 4-е изд .; Prentice Hall Press: Верхняя Сэдл-Ривер, Нью-Джерси, США, 2020. [Google Scholar]
«> Russell, S .; Норвинг, П. Искусственный интеллект: современный подход, 4-е изд .; Prentice Hall Press: Верхняя Сэдл-Ривер, Нью-Джерси, США, 2020. [Google Scholar] В материалах симпозиума IEEE по интеллектуальным транспортным средствам (IV) 2013 г., Голд-Кост, Австралия, 23–26 июня 2013 г .; С. 109–114. [Google Scholar] [CrossRef]
В материалах симпозиума IEEE по интеллектуальным транспортным средствам (IV) 2013 г., Голд-Кост, Австралия, 23–26 июня 2013 г .; С. 109–114. [Google Scholar] [CrossRef]
 На втором рисунке описан алгоритм в платформе ROS. На последнем рисунке показан профиль скорости на каждом временном шаге.
На втором рисунке описан алгоритм в платформе ROS. На последнем рисунке показан профиль скорости на каждом временном шаге.
© 2021 Авторы.Лицензиат MDPI, Базель, Швейцария. Эта статья представляет собой статью в открытом доступе, распространяемую в соответствии с условиями лицензии Creative Commons Attribution (CC BY) (http://creativecommons. org/licenses/by/4.0/).
org/licenses/by/4.0/). Что означает термин «ограниченная видимость»? ПДД на этом участке проезжей части
Что означает термин «ограниченная видимость»?
 На практике средним значением считается расстояние менее ста метров.
На практике средним значением считается расстояние менее ста метров. Ограниченная видимость
Советы начинающим водителям
 В этом случае поможет логическая уловка. Недостаточная видимость — это состояние при недостатке освещения, то есть отсутствии необходимого света. И ограниченный — неполный вид на дорогу по физическим причинам.
В этом случае поможет логическая уловка. Недостаточная видимость — это состояние при недостатке освещения, то есть отсутствии необходимого света. И ограниченный — неполный вид на дорогу по физическим причинам. Нью-Йорк ДТП на мотоциклах с ограниченной видимостью
 Это особенно верно в таких случаях, как туман, снег, мокрый снег или другие погодные условия, которые ухудшают видимость.
Это особенно верно в таких случаях, как туман, снег, мокрый снег или другие погодные условия, которые ухудшают видимость. Любой, кто пострадал в результате аварии на мотоцикле, может не полностью выздороветь.
Любой, кто пострадал в результате аварии на мотоцикле, может не полностью выздороветь. Ограниченная видимость — это определенно то, с чем сталкивались водители, мотоциклисты и велосипедисты; тем не менее, водители обязаны проявлять осторожность перед всеми остальными на дороге и должны выполнять эту обязанность надлежащим образом, чтобы не быть названными виновными в судебном иске о травмах.Признание виновным в судебном иске о телесных повреждениях может привести к присуждению значительного ущерба жертве, если она получила катастрофические травмы. Проблемы с ограниченной видимостью особенно беспокоят мотоциклистов, и мотоциклисты всегда должны проявлять особую безопасность и осторожность и по возможности вообще избегать выезда на дорогу. Если вы как мотоциклист едете по дороге и замечаете, что условия ограниченной видимости начинают ухудшаться, остановитесь и посмотрите, сможете ли вы поймать подъем в другом месте или подождите, пока условия не пройдут.Находясь в дороге, вы можете оказаться в эпицентре серьезной аварии, которая может повредить или убить других людей. Если вы уже получили травму в результате подобной аварии, вам необходимо немедленно обратиться за помощью, чтобы избежать превышения срока давности.
Ограниченная видимость — это определенно то, с чем сталкивались водители, мотоциклисты и велосипедисты; тем не менее, водители обязаны проявлять осторожность перед всеми остальными на дороге и должны выполнять эту обязанность надлежащим образом, чтобы не быть названными виновными в судебном иске о травмах.Признание виновным в судебном иске о телесных повреждениях может привести к присуждению значительного ущерба жертве, если она получила катастрофические травмы. Проблемы с ограниченной видимостью особенно беспокоят мотоциклистов, и мотоциклисты всегда должны проявлять особую безопасность и осторожность и по возможности вообще избегать выезда на дорогу. Если вы как мотоциклист едете по дороге и замечаете, что условия ограниченной видимости начинают ухудшаться, остановитесь и посмотрите, сможете ли вы поймать подъем в другом месте или подождите, пока условия не пройдут.Находясь в дороге, вы можете оказаться в эпицентре серьезной аварии, которая может повредить или убить других людей. Если вы уже получили травму в результате подобной аварии, вам необходимо немедленно обратиться за помощью, чтобы избежать превышения срока давности.
5 способов улучшить видимость во время вождения — техническое обслуживание и ремонт автомобилей
 С левой стороны наклоните голову так, чтобы она находилась на одном уровне со стеклом со стороны водителя, и отрегулируйте зеркало так, чтобы вы могли видеть только боковую часть автомобиля. Для правого зеркала сделайте то же самое, удерживая голову в центре автомобиля. Чтобы привыкнуть к зеркалам в этом положении, может потребоваться время, но их новый угол должен полностью устранить это опасное слепое пятно.
С левой стороны наклоните голову так, чтобы она находилась на одном уровне со стеклом со стороны водителя, и отрегулируйте зеркало так, чтобы вы могли видеть только боковую часть автомобиля. Для правого зеркала сделайте то же самое, удерживая голову в центре автомобиля. Чтобы привыкнуть к зеркалам в этом положении, может потребоваться время, но их новый угол должен полностью устранить это опасное слепое пятно.
Для еще большей уверенности в том, что другой автомобиль не приближается без вашего ведома, выберите систему предупреждения о слепых зонах при следующей покупке автомобиля. Он предупредит вас о невидимых машинах по вашим флангам. Транспортные средства с более высокой посадкой страдают от потери видимости из-за задней двери, а это означает, что вы не будете знать, что игрушки, домашние животные или пожарные гидранты мешают вам. Резервная камера снимает опасения, что ваш быстрый выезд из гаража закончится сносом больших колес вашего сына и обезображиванием вашего собственного набора колес. Улучшите видимость, приобретя его как запчасть на вторичном рынке или установив, когда вы в следующий раз будете покупать новый автомобиль. Несмотря на то, что автомобили постоянно становятся больше, места для парковки, похоже, остаются удручающе маленькими. Не говоря уже о том, что параллельная парковка в ограниченном пространстве даже в лучшие времена устрашает. Датчики парковки на звуке помогут вам при парковке без звона. Как и камера заднего вида, они доступны в качестве запасных частей или в качестве опции на новых автомобилях. Транспортные средства бывают всех форм и размеров, а это значит, что их окна имеют разные размеры и угол наклона.К сожалению, некоторые комбинации могут снизить вашу видимость во время вождения. Лучшее время, чтобы разобраться в проблеме видения, — это когда вы впервые на рынке новой машины. Во время тест-драйва убедитесь, что сзади у вас есть прямая видимость. Поиграйте с боковыми зеркалами и отрегулируйте их по мере необходимости. Вам комфортно с той протяженностью дороги, которую вы видите? Если да, вычеркните это из списка и продолжайте покупать новые автомобили. Если нет, попробуйте водить другие модели или спросите об их технических продуктах — возможно, они уже решили проблему с помощью системы предупреждения о слепых зонах или датчиков парковки.Детям нужны солнцезащитные козырьки, чтобы защитить их от бликов, химчистка вешается вокруг машины, а иногда багажник загружен до предела. Есть много случаев, когда мало что можно сделать с ограниченной видимостью. В таких случаях отрегулируйте зеркала по мере своих возможностей и отработайте навыки безопасного вождения. Во всех остальных случаях просто подумайте, куда вы все складываете. Вы можете легко приобрести вешалку, которая оборачивается вокруг подголовника переднего сиденья, чтобы ваша одежда висела без складок, не закрывая обзор.При штабелировании вещей в задней части, держите середину свободной от вещей, чтобы вы могли видеть заднюю часть. Небольшое маневрирование имеет большое значение, чтобы сделать вашу поездку более безопасной.
Улучшите видимость, приобретя его как запчасть на вторичном рынке или установив, когда вы в следующий раз будете покупать новый автомобиль. Несмотря на то, что автомобили постоянно становятся больше, места для парковки, похоже, остаются удручающе маленькими. Не говоря уже о том, что параллельная парковка в ограниченном пространстве даже в лучшие времена устрашает. Датчики парковки на звуке помогут вам при парковке без звона. Как и камера заднего вида, они доступны в качестве запасных частей или в качестве опции на новых автомобилях. Транспортные средства бывают всех форм и размеров, а это значит, что их окна имеют разные размеры и угол наклона.К сожалению, некоторые комбинации могут снизить вашу видимость во время вождения. Лучшее время, чтобы разобраться в проблеме видения, — это когда вы впервые на рынке новой машины. Во время тест-драйва убедитесь, что сзади у вас есть прямая видимость. Поиграйте с боковыми зеркалами и отрегулируйте их по мере необходимости. Вам комфортно с той протяженностью дороги, которую вы видите? Если да, вычеркните это из списка и продолжайте покупать новые автомобили. Если нет, попробуйте водить другие модели или спросите об их технических продуктах — возможно, они уже решили проблему с помощью системы предупреждения о слепых зонах или датчиков парковки.Детям нужны солнцезащитные козырьки, чтобы защитить их от бликов, химчистка вешается вокруг машины, а иногда багажник загружен до предела. Есть много случаев, когда мало что можно сделать с ограниченной видимостью. В таких случаях отрегулируйте зеркала по мере своих возможностей и отработайте навыки безопасного вождения. Во всех остальных случаях просто подумайте, куда вы все складываете. Вы можете легко приобрести вешалку, которая оборачивается вокруг подголовника переднего сиденья, чтобы ваша одежда висела без складок, не закрывая обзор.При штабелировании вещей в задней части, держите середину свободной от вещей, чтобы вы могли видеть заднюю часть. Небольшое маневрирование имеет большое значение, чтобы сделать вашу поездку более безопасной. СИЗ и одежда повышенной видимости
НЕОБХОДИМО УВИДЕТЬ
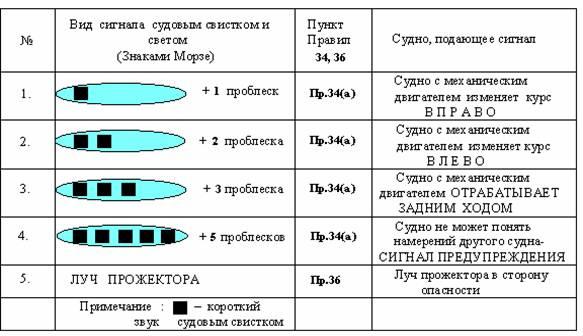 Если вы и ваша бригада работаете в темноте или в зоне с интенсивным движением, вам нужно будет надеть на них СИЗ, чтобы они оставались на виду, чтобы оставаться в безопасности.Bulwark® Protection предоставляет одежду с хорошей видимостью, которая будет предупреждать водителей и других рабочих, особенно в условиях низкой освещенности.
Если вы и ваша бригада работаете в темноте или в зоне с интенсивным движением, вам нужно будет надеть на них СИЗ, чтобы они оставались на виду, чтобы оставаться в безопасности.Bulwark® Protection предоставляет одежду с хорошей видимостью, которая будет предупреждать водителей и других рабочих, особенно в условиях низкой освещенности.
SDI Night / Limited Visibility Diver
Бесплатная сверхэкономичная доставка при заказах на сумму более 500 долларов США для международных покупок 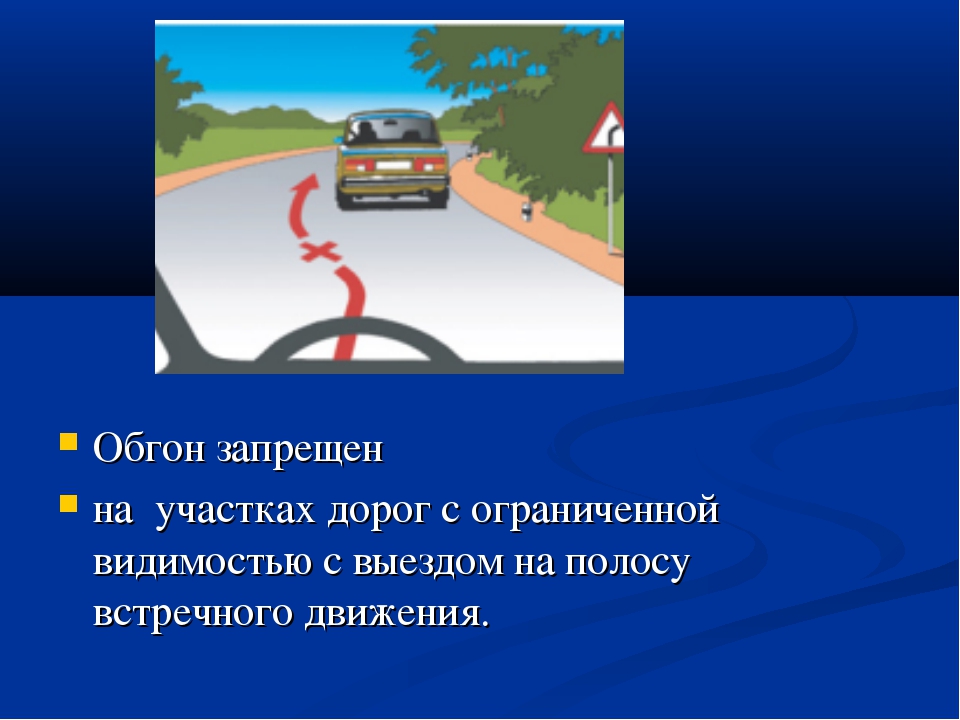 Большинство заказов доставляются к вашей двери со стандартной доставкой менее чем за 4 дня !! Большинству других розничных продавцов вам придется платить дополнительные расходы по доставке, чтобы доставить товар так быстро.
Большинство заказов доставляются к вашей двери со стандартной доставкой менее чем за 4 дня !! Большинству других розничных продавцов вам придется платить дополнительные расходы по доставке, чтобы доставить товар так быстро.
— Чтобы получить БЕСПЛАТНУЮ ДОСТАВКУ, вы должны заплатить 75 долларов из своего кармана за товары, не предназначенные для продажи. Если вы используете баллы лояльности, они не могут снизить вас ниже порогового уровня в 75 долларов, иначе с вас будет взиматься плата за доставку. Если у вас есть товар на 100 долларов и вы потратили 30 долларов на бонусные баллы, вы не получите бесплатную доставку, потому что ваша новая сумма составляет 70 долларов.
Dive Right In Scuba Бесплатная доставка распространяется на стандартную наземную доставку в любую точку мира при заказах на общую сумму 500 долларов США и более (за исключением ребризеров, баллонов, компрессоров и грузов).Предметы со скидкой также не имеют права на бесплатную доставку. Если вы разработали специальную цену с Dive Right In Scuba в предложении или электронном письме, бесплатная доставка НЕ имеет права. Если вы решите воспользоваться ускоренной доставкой, вам будет начислена плата за обычную наземную доставку, а разница будет выплачена только ускоренной доставке. Если вы вернете товар, вам не вернут деньги за бесплатную доставку. Это относится к адресам, по которым USPS может осуществить доставку. Если вам нужны другие способы доставки, бесплатная доставка НЕ применяется.Если у вас нет физического адреса для отправки (Utila), бесплатная доставка НЕ применяется. Super Saver International предлагается БЕСПЛАТНО для большинства заказов на общую сумму более 500 долларов США за пределами США. Единственная проблема заключается в том, что этот способ доставки не предоставляет информацию об отслеживании в реальном времени. Срок доставки обычно составляет 3 недели или меньше, а в некоторые из более удаленных мест может потребоваться больше времени. Ваши товары будут отправлены застрахованными, и вы можете оплатить некоторые импортные пошлины и налоги в зависимости от вашего местного правительства.Утерянные посылки могут быть заменены только после того, как USPS произведет оплату за утерянные предметы. Почтовая служба США Priority Mail International предлагает недорогую и быструю доставку. Не считая времени на прохождение посылки на таможне, это около 2 недель в зависимости от вашего местоположения. Этот вариант не предоставляет вам информацию об отслеживании в реальном времени. Почтовая служба США Express Mail International — это очень экономичный выбор для еще более быстрой доставки вашего снаряжения для дайвинга.Этот вариант обычно занимает около 1 недели без учета таможенного оформления. Как и в случае с другими USPS, ваша покупка не отслеживается в реальном времени. Это доступно почти в 200 странах по всему миру. UPS Worldwide Expedited International предлагает вам возможность быстрой доставки в более чем 60 стран с быстрой внутренней таможенной очисткой. Типичный срок доставки — 1 неделя по вашему адресу. UPS.com автоматически отправит вам по электронной почте номер для отслеживания в реальном времени, когда ваш заказ будет доставлен компанией Dive Right In Scuba.Наша корзина не предложит вам вариант ускоренной доставки UPS Worldwide, если эта услуга недоступна в вашей стране. UPS Worldwide Saver International — это самый быстрый способ доставки в любую страну примерно за 3 рабочих дня или меньше. Вы также получите быстрое внутреннее таможенное оформление, когда экономия времени является первоочередной задачей при получении вашей посылки. UPS.com автоматически отправит вам номер для отслеживания в реальном времени, когда ваш заказ будет доставлен компанией Dive Right In Scuba.Для некоторых адресов может потребоваться дополнительное время для транзита внутри страны из-за удаленности этого адреса. Чтобы узнать о доступности услуг и точных сроках доставки, посетите веб-сайт UPS.com для получения информации о вашем адресе или свяжитесь с нами для получения более точного предложения. Как безопасно перемещаться в зимних дорожных условиях
1. Заснеженные дороги:
2. Ограниченная видимость:
3. Черный лед:
4. Необработанные жилые дороги:
5. Снижение тяги: