
Госавтоинспекция разъяснила, кого нельзя привлекать за непропуск пешехода — Российская газета
Госавтоинспекция дала разъяснения, в каких случаях водителя можно привлекать к ответственности, а в каких нет за непропуск пешехода на переходе. В этом вопросе есть нюансы, которые еще в 2012 году разъяснил Верховный суд. Однако на практике инспекторы привлекают всех подряд, а суды, не вникая в тонкости законодательства и, вероятно, позабыв о том самом решении Верховного суда, наказывают всех подряд.
Разъяснение Госавтоинспекции, подписанное начальником ГУОБДД МВД России Михаилом Черниковым разослано в региональные ГИБДД еще 4 сентября, возможно, оно как-то облегчит жизнь автомобилистов и их перестанут наказывать за то, что они проехали через переход, когда на противоположной стороне восьмиполосной дороги на него вступил пешеход.
В разъяснении говорится, что «необходимо учитывать, что пунктами 13.1 и 14.1 Правил дорожного движения установлена обязанность водителя при проезде нерегулируемого перекрестка или нерегулируемого пешеходного перехода уступить дорогу пешеходам и велосипедистам, пользующимся преимуществом в движении.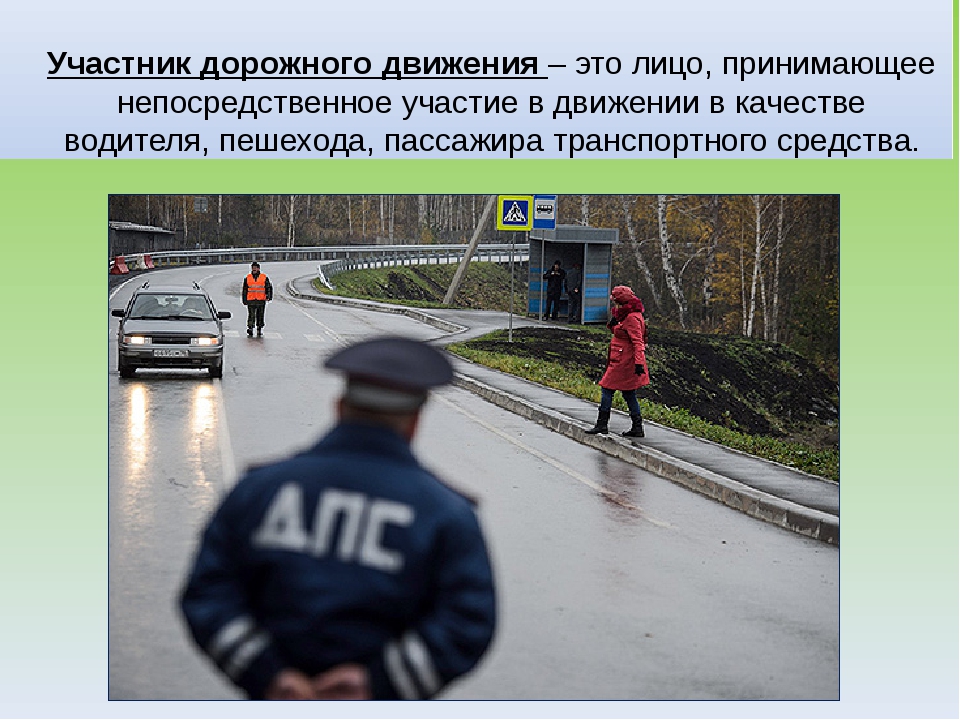 Содержание требования уступить дорогу определено в пункте 1.2 Правил, в соответствии с которым участник дорожного движения не должен начинать, возобновлять или продолжать движение, осуществлять какой-либо маневр, если это может вынудить других участников движения, имеющих по отношению к нему преимущество, изменить направление движения или скорость».
Содержание требования уступить дорогу определено в пункте 1.2 Правил, в соответствии с которым участник дорожного движения не должен начинать, возобновлять или продолжать движение, осуществлять какой-либо маневр, если это может вынудить других участников движения, имеющих по отношению к нему преимущество, изменить направление движения или скорость».
«Обязанность водителя уступить дорогу пешеходу, пересекающему проезжую часть, поставлена в зависимость от необходимости не создавать помех в его движении», — уточняется в разъяснениях. — «Если водитель своими действиями не вынуждает пешехода, имеющего по отношению к нему преимущество, изменить направление движения или скорость, действия водителя не образуют состав административного правонарушения». Это согласуется с позицией Верховного суда, о том, что траектории движения пешехода и автомобиля в данной ситуации не пересекаются.
Если инспекторам эту позицию главка теперь доходчиво разъяснили, то неплохо было бы, чтобы и Верховный суд снова напомнил судьям о своей позиции. Судьи продолжают утверждать, что водители неправильно толкуют нормы Правил.
Судьи продолжают утверждать, что водители неправильно толкуют нормы Правил.
Велосипедист – пешеход или участник дорожного движения?
Если мы обратимся к Правилам дорожного движения, то узнаем, что байк является транспортным средством немеханического типа, а велосипедист выступает в роли его водителя. Если владелец двухколёсного транспорта спешился, то он попадает под категорию «пешеход».
По определению велосипед — это транспортное средство, но не следует его путать с механическими ТС, который приводится в движение двигателем.
Конечно, и велосипед может двигаться за счёт мотора, но для того, чтобы ему не уйти под определение механических ТС, а остаться «Велосипедом», согласно ПДД 2019 года двигатель на нём должен соответствовать трём критериям:
• это должен быть только электродвигатель,
• его мощность должна быть не более 0,25 кВт (~0,34 л.с.),
• он должен автоматически отключаться на скорости 25 км/ч и более.
Велосипедист – в то же время и водитель. Этот статус ему даёт определение водителя – любое лицо, управляющее транспортным средством.
Этот статус ему даёт определение водителя – любое лицо, управляющее транспортным средством.
Появились изменения ПДД, которые расширяют права пешеходов и велосипедистов. Например, введено новое понятие «Велосипедная зона». Она указывается специальным дорожным знаком, которого раньше не было. В связи с изменениями, теперь в велосипедной зоне можно ехать так же, как раньше было предусмотрено передвижение для дворов, скорость не может быть выше 20 км в час.
Пешеходам допускается переходить велосипедную зону во всех местах, но они должны учитывать наличие зеленого сигнала светофора, не создавать помех движению велосипедов, долго не задерживаться на дороге.
 При приближении автомобиля с проблесковым маяком и сиреной, пешеходы должны уступать ему дорогу.
При приближении автомобиля с проблесковым маяком и сиреной, пешеходы должны уступать ему дорогу.
Последним новшеством является новая разметка на дороге за номером 1.24.6. Она обозначает начало велосипедной зоны. По внешнему виду разметка напоминает знак 5.33.1. Другие новшества для водителей велосипедов Новые изменения введены и в мелких деталях ПДД. Это касается приведения в соответствие с другими законами, а также с пунктами настоящих Правил.
 По-новому водителям велосипедов разрешают поворачивать налево с правой части дороги и разворачиваться. Но это разрешение действует при условии, если дорога расположена далеко от велосипедной зоны.
По-новому водителям велосипедов разрешают поворачивать налево с правой части дороги и разворачиваться. Но это разрешение действует при условии, если дорога расположена далеко от велосипедной зоны.
Водители велосипедов старше 14 лет могут ездить в следующих местах: По полосе для велосипедов, по велопешеходной дорожке. По проезжей части дороги справа. Могут двигаться по обочине. По пешеходной дорожке или тротуару. По тротуару можно ездить, если нет обочины, либо невозможно ехать по правому краю или нет полосы для велосипедистов.
Кроме этого, существуют некоторые исключения из указанных условий:
Если велосипедисты едут целой колонной, то допускается ехать по проезжей части.
Допускается ездить по пешеходной дорожке, если вы сопровождаете детей до 14 лет, который управляет велосипедом, либо везете ребенка, возраст которого не более 7 лет.
Если велосипедисты едут в два ряда, то ширина велосипеда по габаритам не должна быть более 75 см.
Колонна делится на группы по 10 человек при одном ряде, или по 10 пар в два ряда. Для обеспечения возможности обгона другому транспорту, между группами должно быть расстояние не менее 80 метров.
Популярными нарушениями велосипедистов является езда по встречной полосе, либо по пешеходному переходу. При этом они забывают, что являются водителями, а не пешеходами. Оба случая представляют большую опасность на дороге. В таких ситуациях часто гибнут дети, но автовладельцы не будут виноваты. Они обязаны уступать только пешеходам, а не водителям. Этот транспорт может достигать скорости 40 км в час и более.
Некоторые владельцы велосипедов используют пешеходные переходы для разворота, однако подобные маневры запрещены. Правила дорожного движения указывают, что велосипедисту потребуется спешиться, перейти зебру, ведя «железного коня» за руль. После чего велосипедист вправе выбрать любое направление для дальнейшего движения.
Существует ещё одно отличие пешехода, в сравнении со спешившимся велосипедистом. За пределами городов, деревень, поселков пешеходам требуется идти навстречу потоку машин и других транспортных средств, владельцам велосипедов же требуется идти вдоль движения потока.
Фото: открытые источники
Культура поведения участников дорожного движения
Культура поведения участников дорожного движения
- Правила «дорожного этикета»
- Зависимость от настроения
- Ваше восприятие
Когда новоиспеченный водитель попадает на дорогу, он впервые сталкивается с такими трудностями, как регулировщик, светофоры, множество разнообразных звуков и сигналов.
Опытные водители очень часто избегают всяческих проблем на дороге благодаря своему личному «языку и правилам хорошего тона водителей».
Приведём шокирующие данные статистики. Ежегодно в результате транспортных происшествий на планете гибнут до 400 тысяч человек в возрасте до 25 лет. Это означает, что каждый день на дорогах в результате ДТП погибают более тысячи молодых людей. В России статистика соответствует общемировой – более 40 % жертв дорожных аварий – молодежь.
В ряде стран благодаря принимаемым мерам наблюдается улучшение ситуации, однако в России обстановка по-прежнему остается напряженной. Причины, не только в неудовлетворительном состоянии дорог или переизбытке транспортных средств, но и в человеческом факторе, отсутствии культуры на дорогах.
Культура поведения на дороге должна прививаться с детства, и каждый участник дорожного движения должен осознавать меру своей ответственности. Должен понимать, что его недисциплинированность на дороге является, по сути, покушением на жизнь и здоровье других людей.
Должен понимать, что его недисциплинированность на дороге является, по сути, покушением на жизнь и здоровье других людей.
На дороге существует множество знаков, которыми водители обмениваются для сообщения друг другу различной информации. Это неформальные правила поведения на дороге, поскольку они не оговорены ни в одном из существующих учебников по обучению вождению, ни в Правилах дорожного движения. Азбука световой сигнализации существует уже достаточно давно и успешно используется автолюбителями.
Первыми специальные знаки общения стали применять водители-дальнобойщики. Можно сказать, что дальнобойщики и являются основными законодателями в области дорожного этикета. Общение с водителями с других стран делает такие негласные ПДД универсальными и понятными на дорогах всей Европы.
1. Правила «дорожного этикета»
Важно запомнить лишь некоторые общеизвестные среди водителей негласные правила «дорожного этикета».
Чтобы выразить благодарность, нужно включить аварийную сигнализацию или пару раз моргнуть светом. Как правило, это применяется в случаях, когда Вам дали обогнать впереди идущее авто, дали возможность выехать с обочины.
Как правило, это применяется в случаях, когда Вам дали обогнать впереди идущее авто, дали возможность выехать с обочины.
Чтобы сзади идущее авто не начало обгон, когда впереди Вас какая либо опасность, еще не огражденная знаками, нужно включить аварийную сигнализацию или несколько раз нажать на педаль тормоза.
Когда в ночное время суток Вам на встречу едет автомобиль с включенным дальним светом и вас начинает слепить, тогда нужно кратковременно включить дальний свет.
Если Вы не успеваете совершить уже начатый обгон, необходимо дать один или несколько длинных гудков. Водитель автомобиля, обгон которого Вы совершаете, должен сбить скорость и уступить Вам дорогу.
Если Вас пропустили, моргните «аварийкой», что в данном случае будет обозначать «спасибо».
Если Вы случайно кого-то «подрезали», моргните аварийной сигнализацией, что обозначает извинение.
Если на встречной полосе Вы заметили препятствие, которое может привести к дорожно-транспортному происшествию, переключая ближний свет на дальний, Вы предупредите водителей, движущихся вам навстречу, о необходимости снизить скорость.
Если Вы заметили, что в соседней машине плохо закрыта дверь, приоткрыт багажник, спущено колесо или есть любые другие технические неисправности, поравняйтесь с автомобилем, посигнальте и укажите на поломку жестом руки.
Если Вы движетесь в крайнем левом ряду, и Вам моргают фарами сзади идущие автомобили, по возможности перестройтесь в правый ряд. В Европе в этом случае включают левый сигнал поворота и едут за Вами.
Если Вы увидели машину, едущую за Вами с включенный левым поворотником — пропустите, за Вами едет европеец или просто цивилизованный водитель.
Всегда включайте указатели поворота при совершении манёвра: обгон, перестроение в другой ряд, поворот и т.п., даже если Вам кажется, что на дороге позади Вас никого нет. Совершение манёвров без использования указателей поворота выражает неуважение к другим участникам дорожного движения и, кроме того, провоцирует ДТП. Например, Вы можете не заметить автомобиль, находящийся в «мёртвой зоне», и, «подрезав» его, создадите аварийную ситуацию.
Кроме того, не забывайте, что пешеходы и велосипедисты тоже ориентируются на дороге по Вашим «поворотникам»!
Подавайте звуковой сигнал только тогда, когда это помогает предотвратить аварийную ситуацию. Например:
• неожиданное появление пешехода на близком расстоянии от вашего автомобиля — в этом случае Вы непременно обязаны применить сигнал;
• для предупреждения других участников движения о возможном наезде на них или столкновении.
Звуковой сигнал никогда не следует подавать, чтобы вызвать кого-то из дома; требовать, чтобы открыли ворота, или ускорить движение другого участника движения, если он задерживается при выполнении манёвра.
При быстрой езде, движении утром или вечером, а также по горным дорогам, когда солнце светит Вам в спину, включите ближний свет фар. Это поможет идентифицировать Ваш автомобиль на дороге.
2. Зависимость от настроения
Безопасность человека во многом зависит от психоэмоциональных факторов, проще говоря от Вашего настроения. Важно понять и оценить Ваше состояние, отношение к окружающим, то есть определить «врагов безопасности» и научиться с ними справляться. У многих водителей малейшая некорректность соседа по дороге вызывает агрессию. Чем меньше у такого водителя времени, чтобы добраться в назначенный срок из пункта А в пункт Б, тем крепче его «эпитеты». В ход идут и красноречивые жесты, подкрепляемые мигающим светом фар и нетерпеливыми гудками клаксона. Парадокс заключается в том, что даже обычно спокойные и уравновешенные люди во время езды могут «заразиться» вирусом агрессии.
Важно понять и оценить Ваше состояние, отношение к окружающим, то есть определить «врагов безопасности» и научиться с ними справляться. У многих водителей малейшая некорректность соседа по дороге вызывает агрессию. Чем меньше у такого водителя времени, чтобы добраться в назначенный срок из пункта А в пункт Б, тем крепче его «эпитеты». В ход идут и красноречивые жесты, подкрепляемые мигающим светом фар и нетерпеливыми гудками клаксона. Парадокс заключается в том, что даже обычно спокойные и уравновешенные люди во время езды могут «заразиться» вирусом агрессии.
Одна женщина на тренинге у психолога призналась, что очень любит ездить на автомобиле, однако не в состоянии контролировать свою речь и поведение, замечая чужие ошибки в дорожном потоке. Для начала ей предложили воспользоваться психологическим приемом, связанным с подменой понятий. Каждый раз в критической ситуации вместо непристойности по адресу очередного объекта необходимо было произносить заранее выбранную фразу, несущую заряд положительных эмоций, например: «Я люблю тебя больше всех на свете!» Эффект превзошел все ожидания! Через несколько дней интонация стала доброжелательной, а через две недели было совершено удивительное открытие: оказывается, вежливость и тактичность не менее заразны, чем агрессия! Более того, эти прекрасные качества сводят агрессию на нет.
3. Ваше восприятие
Первое, что необходимо предпринять, — оптимизировать процесс восприятия. Известно, что около 90% информации среднестатистический человек получает с помощью зрения, 6% — с помощью слуха, а оставшиеся 4% — с помощью обоняния и осязания. Откажитесь на первых порах от музыки и разговоров с пассажирами во время движения, а окно приоткройте, чтобы улавливать и распознавать шум проезжающих мимо машин, визг покрышек или сирены автомобилей спецслужб. Учитесь интуитивно распознавать на дороге машины, требующие к себе повышенного внимания. Это совсем не трудно, все дело в правильном подходе и наблюдательности. Ведь каждый умеет с высокой степенью вероятности дать определенную характеристику любому встречному прохожему: по одежде, походке, выражению лица, поведению. Можно не только определить его социальный статус, но и спрогнозировать намерения относительно вас. Автомобиль — своего рода дополнительная внешняя оболочка водителя, его «верхняя одежда». Новые госномера, знак «туфелька» на заднем стекле, «шрамы» и вмятины на боках, броские, вызывающие наклейки, дерганая или неуверенная «походка» — все это исходные данные для ваших наблюдений.
Новые госномера, знак «туфелька» на заднем стекле, «шрамы» и вмятины на боках, броские, вызывающие наклейки, дерганая или неуверенная «походка» — все это исходные данные для ваших наблюдений.
Россия инициировала пересмотр Конвенции о дорожном движении
Россия вместе с Бельгией, Люксембургом, Португалией, Францией, Финляндией, Швейцарией и Швецией в рамках Экономического и социального совета (ЭСС) ООН иницировала пересмотр Конвенции о дорожном движении, подписанной в 1968 г. в Вене. Это документ фактически запрещает использование на дорогах беспилотников. Изменения, которые предлагается в него внести, касаются допуска на дороги общего пользования беспилотных автомобилей, следует из материалов ЭСС ООН, с которыми ознакомились «Ведомости».
Конвенция о дорожном движении – документ, определяющий нормы функционирования дорожно-транспортных систем и стандартизирующий правила движения в странах-участницах (сейчас их 91). В нем сказано, что контроль над транспортным средством осуществляет человек, участие роботов там не предусмотрено, говорит руководитель управления по транспорту фонда «Сколково» Кирилл Жанайдаров.
«Модификация Конвенции о дорожном движении – это первый пункт дорожной карты «Автонет», утвержденной правительством РФ, — рассказал «Ведомостям» представитель «Автонета». — Два года назад мы совместно с Минтрансом подготовили и внесли соответствующее предложение на площадке ООН. Нас тогда поддержала Франция и Швейцария, но в целом идея не была реализована немедленно – тогда коррекцию сочли преждевременной. Сейчас процесс возобновился, у самой идеи изменения конвенции сторонников больше, соответственно, шансы на успех выше».
Регламент изменения таких документов следующий: секретариат ЭСС ООН рассылает в административные органы стран, присоединившихся к конвенции, предложения по изменению документа. На формулировку и представление возражений участникам конвенции дается 12 месяцев. Если за это время набралось не более трети возражающих, то генеральный секретарь конвенции информирует все страны о вступлении в силу этого решения через шесть месяцев. Поэтому если решение будет принято, то в силу оно вступит через полтора-два года, прогнозируют в «Автонете».
Россия и европейские государства предлагают ввести в конвенцию понятие «автоматизированной системы вождения», т. е. программно-аппаратного комплекса, осуществляющего динамический контроль за машиной. Под ним авторы поправок подразумевают все функции, необходимые при передвижении: контроль за дорогой, управление автомобилем, планирование и сигнализацию о маневрах. Также предлагается пункт о том, что автоматизированная система может быть признана водителем, если транспортное средство соответствует техническим и эксплуатационным требованиям признавших поправки государств.
«Действие настоящей статьи ограничивается территорией договаривающейся стороны, на которой применяются соответствующие национальные технические правила и законодательство, регулирующее эксплуатацию», – говорится в документе.
О том, что конвенция является преградой для массового внедрения беспилотных автомобилей, ранее неоднократно говорили разработчики беспилотных автомобильных систем: пока РФ является ее участником, невозможно скорректировать правила дорожного движения так, чтобы в них были предусмотрены беспилотники.
«На протяжении нескольких лет на площадке Глобального форума по безопасности дорожного движения при ООН с участием представителей Минтранса и МВД России велась подготовка изменений в конвенцию, разрешающих эксплуатацию высокоавтоматизированных транспортных средств, – заявили «Ведомостям» в Минтрансе. – Сейчас ведется оформление одобренных изменений в нее. Они позволят использовать беспилотный транспорт на дорогах общего пользования».
Также принято решение о формировании группы экспертов по подготовке новой конвенции для обеспечения международной основы автоматизации транспорта, добавили в пресс-службе Минтранса. В какой стадии формирование этой группы и кто в нее войдет – в министерстве не уточнили.
В случае если многие участники конвенции не поддержат предлагаемые изменения, обойти ее положения будет непросто, отмечают опрошенные «Ведомостями» эксперты.
«Россия либо соблюдает требования, общие для всех стран-участниц, либо выходит из договора, – утверждает управляющий партнер юридической фирмы Enterprise Legal Solutions Юрий Федюкин. – Частичное отступление от установленных конвенцией положений допускается, но только в оговоренных случаях – например, при установлении ограничений на допуск большегрузных транспортных средств, если их масса, габаритные характеристики не соответствуют установленным на уровне местного законодательства параметрам». В случаях, когда отступление от общих для всех положений конвенции самим документом не предусматривается, оно не допускается.
– Частичное отступление от установленных конвенцией положений допускается, но только в оговоренных случаях – например, при установлении ограничений на допуск большегрузных транспортных средств, если их масса, габаритные характеристики не соответствуют установленным на уровне местного законодательства параметрам». В случаях, когда отступление от общих для всех положений конвенции самим документом не предусматривается, оно не допускается.
По словам Федюкина, США, Канада, почти все страны Азии, включая Китай, Индия, Австралия, Аргентина не присоединились к конвенции: «Но это не мешает им приводить нормы, связанные с дорожным движением, в соответствие с принятыми в странах договора».
«Главное преимущество участия в договоре – это допуск к международному движению транспортных средств, зарегистрированных в одной стране-участнице, по территории других стран, – объясняет Федюкин. – То есть участники договариваются, что, если транспортное средство допускается к движению в Германии, оно допускается и на Украине, и в Бельгии, и в Норвегии, и в России. Это же касается и признания водительских прав, выданных в странах, присоединившихся к конвенции».
Это же касается и признания водительских прав, выданных в странах, присоединившихся к конвенции».
Теоретически денонсация конвенции может привести к достаточно серьезным негативным последствиям – например, при организации движения грузового транспорта, считают эксперты. В большинстве стран, которые к ней не присоединялись, действуют нормы законодательства, позволяющие обеспечивать и движение зарегистрированных в других государствах транспортных средств, и использование водительских удостоверений, выданных за рубежом. Но для участников конвенции признание регистрационных удостоверений и водительских прав, выданных ее участниками, – это обязанность. А в иных случаях это вопрос на усмотрение администрации конкретной страны.
Для внедрения в России беспилотного транспорта необходимо менять не только международные договоренности, но и национальное законодательство, отмечают юристы. Чтобы полноценно эксплуатировать беспилотные авто, необходимо пересмотреть не только правила дорожного движения, предусмотреть правила получения права управления таким автомобилем и привлечения к ответственности за нарушение ПДД, рассказывала «Ведомостям» ранее адвокат Forward Legal Людмила Лукьянова: «Также нужно адаптировать законы, регулирующие ОСАГО, каско, особенности фиксации ДТП и определения страхового возмещения».
В глобальном смысле также могут измениться таможенные, налоговые нормы. «С учетом того, что беспилотный автомобиль технически более сложный и дорогой, чем обычный автомобиль, скорее всего, изменятся правила начисления налогов и таможенных сборов при ввозе беспилотников в Россию», – отметила Лукьянова.
Минтранс совместно с другими ведомствами внес в правительство комплекс мероприятий по созданию нормативной и технической базы для эксплуатации беспилотников, сообщил представитель ведомства: «Предусмотрена подготовка законопроекта, закрепляющего правоотношения, возникающие при внедрении в транспортный комплекс. Также планируется разработка проектов решений о внесении изменений в межгосударственные стандарты».
(PDF) Комплексное прогнозирование участников движения на произвольных дорожных сетях
JOURNAL OF XX, VOL. Х, НЕТ. X, MONTH YEAR 16
[40] А. Жирар и К. Ле Герник, «Эффективный анализ достижимости для линейных систем
с использованием функций поддержки», в Proc. 17-го Всемирного конгресса IFAC
17-го Всемирного конгресса IFAC
, 2008 г., стр. 8966–8971.
[41] О. Стурсберг и Б. Х. Крог, «Эффективное представление и вычисление
множеств достижимости для гибридных систем», в Hybrid Systems: Computation
and Control, сер.LNCS 2623. Springer, 2003, стр. 482–497.
[42] Т. А. Хензингер, Б. Хоровиц, Р. Маджумдар и Х. Вонг-Той, «Beyond
HyTech: анализ гибридных систем с использованием интервальных численных методов», в
Гибридные системы: вычисления и управление, сер. LNCS 1790. Springer,
2000, стр. 130–144.
[43] К. Шмидт, Ф. Охсл и В. Бранц, «Исследования по планированию траектории
в аварийных ситуациях с несколькими объектами», в Proc. конференции IEEE
по интеллектуальным транспортным системам, 2006 г., стр.988–992.
[44] С. Сёнтжес и М. Альтхофф, «Определение отсутствия уклоняющихся траекторий
для систем предотвращения столкновений», в Proc. 18-й Международной конференции IEEE
по интеллектуальным транспортным системам, 2015 г.,
стр. 956 — 961.
[45] Д. Грин, Дж. Лю, Дж. Райх, Ю. Хирокава, А. Синагава, Х. Ито и
,Т. Миками, «Эффективная вычислительная архитектура для системы раннего предупреждения столкновений
для транспортных средств, пешеходов и велосипедистов», IEEE
Transactions on Intelligent Transportation Systems, vol.12, вып. 4, pp.
942–953, 2011.
[46] П. Фальконе, М. Али и Дж. Сьоберг, «Прогнозная оценка угроз с помощью анализа достижимости
и теории инвариантности множеств», IEEE Transactions on
Интеллектуальные транспортные системы, т. 12, вып. 4, pp. 1352–1361, 2011.
[47] Дж. Ван ден Берг, Д. Фергюсон и Дж. Каффнер, «Планирование пути в любое время
и перепланирование в динамических средах», в Proc. Международной конференции
по робототехнике и автоматизации, 2006 г., стр.2366–2371.
[48] С. Бурайн, Т. Фрайхард и Х. Салхи, «Доказуемо безопасная навигация для мобильных роботов
с ограниченным полем обзора в динамических средах»,
Autonomous Robots, vol. 32, нет. 3, стр. 267–283, 2012.
[49] А. Ву и Дж. П. Хау, «Гарантированное избегание бесконечного горизонта
непредсказуемых, динамически ограниченных препятствий», Автономные роботы,
том. 32, нет. 3, pp. 227–242, 2012.
[50] C.F. Chung, T. Furukawa, A.Х. Гоктоган, «Скоординированное управление
для захвата высокоманевренного убегающего с использованием наборов прямой достижимости
», в Proc. Международной конференции IEEE по робототехнике и автоматизации
, 2006 г., стр. 1336–1341.
[51] М. Альтхофф, Д. Хесс и Ф. Гамберт, «Прогнозирование загруженности дорог для
участников дорожного движения», в Proc. 16-й Международной конференции IEEE
по интеллектуальным транспортным системам, 2013 г., стр. 99–105.
[52] Р.Партасарати и Т. Фрайхард, «Проверка состояния неизбежного столкновения
для автомобиля, подобного автомобилю», в Proc. Международной конференции IEEE
по робототехнике и автоматизации, 2007 г., стр. 3068–3073.
[53] А. Платцер и Э. М. Кларк, «Проблема вычисления изображений при проверке модели гибридных систем
», в Hybrid Systems: Computing and Control,
ser. LNCS 4416. Springer, 2007, с. 473486.
[54] П. Бендер, Дж. Циглер и К. Стиллер, «Ланелец: эффективное отображение на карте
для автономного вождения», в Proc.симпозиума IEEE Intelligent Vehicles
, 2014 г., стр. 420–425.
[55] Дж. Циглер, П. Бендер, М. Шрайбер, Х. Латеган, Т. Штраус,
К. Стиллер, Т. Данг, У. Франке, Н. Аппенродт, К. Г. Келлер, Э. Каус,
RGHerrtwich, C. Rabe, D. Pfeiffer, F. Lindner, F. Stein, F. Erbs,
M. Enzweiler, C. Kn¨oppel, J. Hipp, M. Haueis, M. Trepte, C. Brenk,
A. Tamke, M. Ghanaat, M. Braun, A. Joos, H. Fritz, H. Mock, M. Hein,
и E.Зиб, «Заставить Берту вести машину — автономное путешествие по историческому маршруту
», IEEE Intelligent Transportation Systems Magazine,
vol. 6, вып. 2, pp. 8–20, 2014.
[56] L. M. Surhone, M. T. Timpledon, S. F. Marseken, Eds., Vienna
, Конвенция о дорожном движении. VDM Publishing, 2010.
[57] А. Ризальди и М. Альтхофф, «Формализация правил дорожного движения для учета
автономных транспортных средств», в Proc. 18-й Международной конференции IEEE
по интеллектуальным транспортным системам, 2015 г., стр.1658 —
1665.
[58] M. Althoff, D. Althoff, D. Wollherr и M. Buss, «Проверка безопасности
автономных транспортных средств для скоординированных маневров уклонения», в Proc. of
на симпозиуме IEEE по интеллектуальным транспортным средствам, 2010 г., стр. 1078–1083.
[59] Сегель Л. Физика тяги в шинах. Springer, 1974, гл. Шина Traction
на сухих незагрязненных поверхностях, стр. 65–98.
[60] Р. Алур, К. Кукубетис, Н. Хальбвакс, Т. А. Хензингер, П. Х.Ho,
X. Николин, А. Оливеро, Дж. Сифакис и С. Йовин, «Алгоритмический анализ гибридных систем
», Теоретическая информатика, вып. 138,
pp. 3–34, 1995.
[61] М. К. Агостон, Компьютерная графика и геометрическое моделирование: реализация и алгоритмы
. Springer, 2005.
[62] Г. Грейнер и К. Хорман, «Эффективное отсечение произвольных многоугольников»,
ACM Transactions on Graphics, vol. 17, нет. 2, pp. 71–83, 1998.
[63] S.К. Гош и Д. М. Маунт, «Чувствительный к выходу алгоритм для
вычислений графов видимости», SIAM Journal on Computing, vol. 20,
нет. 5, pp. 888–910, 1991.
[64] Дж. Хершбергер и С. Сури, «Оптимальный алгоритм для евклидовых кратчайших
путей на плоскости», SIAM Journal on Computing, vol. 28, вып. 6, pp.
2215–2256, 1999.
[65] Х.-П. Хуанг и С.-Й. Чанг, «Граф динамической видимости для планирования пути
», Proc. Международной конференции IEEE / RSJ по интеллектуальным роботам и системам
, 2004 г., стр.2813–2818.
[66] В. Дж. Люмельский, «О быстром вычислении расстояния между линейными сегментами —
», Письма обработки информации, вып. 21, нет. 2, стр. 55–61, 1985.
[67] С. М. ЛаВалль и Дж. Дж. Каффнер, «Рандомизированное кинодинамическое планирование»,
International Journal of Robotics Research, vol. 20, нет. 5, pp. 378–400,
2001.
[68] C.-G. Уоллман и Х.
Astrom, «Методы измерения трения и корреляция
между трением на дороге и безопасностью движения», в VTI meddelande.
Шведский национальный научно-исследовательский институт дорог и транспорта, 2001.
[69] А. Бхатиа и Э. Фраццоли, «Методы инкрементального поиска для достижимости
анализ непрерывных и гибридных систем», в Hybrid Systems: Com-
putation и Контроль, сер. LNCS 2993. Springer, 2004, стр. 142–156.
[70] Д. Хесс, М. Альтхофф и Т. Саттел, «Сравнение контроллеров слежения за траекторией
для аварийных ситуаций», в Proc. симпозиума IEEE Intelligent
Vehicles, 2013, стр.163–170.
[71] Р.В. Аллен, Х.Т. Шостак, Д.Х. Клайд, Т.Дж. Розенталь и К.Дж. 72] M. Althoff и JM Dolan, «Расчет достижимости моделей
низкого порядка для проверки безопасности моделей дорожных транспортных средств высокого порядка», в
Proc. Американской конференции по контролю, 2012 г., стр. 3559–3566.
[73] Adams / Tire help, MSC Software, 2 MacArthur Place, Санта-Ана, Калифорния
92707, апрель 2011 г., идентификатор документации: DOC9805.[Онлайн]. Доступно:
http://simcompanion.mscsoftware.com/infocenter
Маттиас Альтхофф — доцент кафедры компьютерных наук
естественных наук Технического университета Мюнхен, Германия
многие. В 2005 году получил диплом инженера
по специальности «Машиностроение», а также степень доктора философии.
по специальности «Электротехника» в 2010 году, оба из
Technische Universit¨at M unchen, Германия. С
с 2010 по 2012 год он был докторантом в
Университете Карнеги-Меллона, Питтсбург, США, и
с 2012 по 2013 год доцентом в Tech-
nische Universitat Ilmenau, Германия.Его исследовательские интересы
включают формальную проверку непрерывных
и гибридных систем, анализ достижимости, алгоритмы планирования, нелинейное управление
, автоматизированные транспортные средства и энергетические системы.
Сильвия Магдичи в настоящее время является доктором философии. кандидат
Technische Universit¨at M unchen, Германия. Она повторно получила степень бакалавра наук
. степень в области компьютерной инженерии в
2012 и ее M.Sc. степень в области систем и управления
в 2014 году, оба из Технического университета Яссы,
Румыния.Она присоединилась к кафедре информатики
в Technische Universit¨at M unchen в 2015 году. Ее поисковые интересы по повторному
включают автономные транспортные средства, формальные методы
, анализ достижимости и оптимальное управление.
Вероятностная структура для характеристики поведения участников дорожного движения, обеспечивающая долгосрочное прогнозирование
% PDF-1.7 % 1 0 объект > / Metadata 2 0 R / Names 5 0 R / Outlines 6 0 R / Pages 3 0 R / StructTreeRoot 7 0 R / Type / Catalog / ViewerPreferences >>> эндобдж 2 0 obj > поток application / pdf
[PDF] SPOT: инструмент для прогнозирования участников дорожного движения на основе наборов
ПОКАЗЫВАЕТ 1-10 ИЗ 26 ССЫЛОК
СОРТИРОВАТЬ ПО Релевантности Статьи, на которые больше всего повлияли Недавность
Прогнозирование участников дорожного движения на основе произвольных сетей
Представленные алгоритмы поскольку прогнозирование загруженности работает на произвольных дорожных сетях и дает результаты в пределах части горизонта прогнозирования, и можно доказать, может ли автоматизированное транспортное средство столкнуться с другими участниками движения.Развернуть- Просмотреть 8 отрывков, справочную информацию, методы и результаты
Вероятностное обнаружение столкновений на основе модели при автономном вождении
Учитывается безопасность запланированных маршрутов автономных автомобилей по отношению к движению других участников движения, а также стохастический анализ. Прогнозируется загруженность дороги другими транспортными средствами, что приводит к упрощенному онлайн-алгоритму для приложений в реальном времени. РазвернутьМогут ли автоматизированные дорожные транспортные средства согласовываться с транспортным потоком, обеспечивая при этом безопасное расстояние?
- М.Альтхофф, Роберт Лош
- Инженерия, информатика
- 2016 IEEE 19-я Международная конференция по интеллектуальным транспортным системам (ITSC)
- 2016
- Просмотреть 2 отрывка, справочные методы и справочную информацию
CommonRoad: составные эталонные тесты для планирования движения на дорогах
Для численных экспериментов по планированию движения дорожных транспортных средств требуются многочисленные компоненты: динамика транспортного средства, дорожная сеть, статические препятствия, динамические препятствия и т. Д. их движение во времени, цель… Развернуть
- Просмотреть 2 выдержки, справочную информацию и методы
Формализация правил дорожного движения для учета автономных транспортных средств
- Альберт Ризальди, М.Althoff
- Информатика, инженерия
- 2015 18-я Международная конференция IEEE по интеллектуальным транспортным системам
- 2015
- Просмотреть 1 отрывок, справочная информация
Прогнозирование участников дорожного движения на основе наборов с учетом окклюзий и правил дорожного движения
Обеспечение безопасного планирования движения для автоматизированных дорожных транспортных средств должно гарантировать, что запланированные движения не приведут к столкновению с другими участниками движения.Это серьезная проблема при автономном вождении, поскольку будущее поведение других участников дорожного движения неизвестно, и поскольку участники дорожного движения часто скрыты из-за окклюзии. В этой работе авторы предлагают формальный прогноз на основе наборов, который содержит все допустимые будущие поведения как обнаруженных, так и потенциально скрытых участников трафика. Основываясь на формализованных правилах дорожного движения и недетерминированных моделях движения, авторы проводят анализ достижимости, чтобы предсказать набор возможных уровней занятости и скорости транспортных средств, пешеходов и велосипедистов.Реальные эксперименты с испытательным автомобилем в различных дорожных ситуациях демонстрируют применимость и возможность в реальном времени чрезмерно приближенного прогноза авторов как для онлайн-проверки, так и для безотказного планирования траектории. Даже в загруженных и сложных сценариях дорожного движения подход авторов к прогнозированию позволяет беспилотным транспортным средствам никогда не вызывать аварий.
- URL записи:
- Наличие:
- Дополнительные примечания:
- Авторов:
- Коши, Маркус
- Альтхофф, Маттиас
- Дата публикации: 2021-6
Язык
Информация для СМИ
Предмет / указатель терминов
Информация для подачи
- Регистрационный номер: 01779797
- Тип записи: Публикация
- Файлы: TRIS
- Дата создания: 28 мая 2021 г., 10:47
участников группы сообщества онтологий дорожных событий
Проверить и назначить участник:Хавьер Баррачина
Университет Сарагосы (Universidad de Zaragoza)
Проверить и назначить участник:Мануэль Фог
Университет Сарагосы (Universidad de Zaragoza)
Проверить и назначить участник:Карлос Иглесиас
Индивидуальное обязательство CLA
Проверить и назначить участник:СЕРДЖИО ИЛАРРИ
Университет Сарагосы (Universidad de Zaragoza)
Проверить и назначить участник:Франсиско Дж.Мартинес
Университет Сарагосы (Universidad de Zaragoza)
Сбор и анализ видеороликов о вождении на основе участников дорожного движения
Abstract
Прототипы автономных транспортных средств (АВ) в последние годы используются во все более разнообразных средах. AV должен быть в состоянии надежно обнаруживать и прогнозировать будущее движение участников дорожного движения для обеспечения безопасной работы на основе данных, собранных с высококачественных бортовых датчиков.Датчики, такие как камера и LiDAR, генерируют данные с высокой пропускной способностью, что требует значительных вычислительных ресурсов и ресурсов памяти. Для решения этих проблем AV в этой диссертации исследуются три связанные проблемы: 1) Что будут делать наблюдаемые участники трафика? 2) Вероятно ли, что в ближайшем будущем произойдет аномальное дорожное движение? и 3) Как мы должны собирать данные с высокой пропускной способностью для всего автопарка на основе 1) и 2) в долгосрочной перспективе? Первая проблема связана с прогнозированием будущей траектории движения и поведения пешеходов.Мы предлагаем метод локализации будущего объекта (FOL) для прогнозирования траектории в видеороликах от первого лица (FPV). FOL кодирует разнородные наблюдения, включая ограничивающие прямоугольники, характеристики оптического потока и движения эго-камеры, с помощью многопотоковых рекуррентных нейронных сетей (RNN) для прогнозирования будущих траекторий. Поскольку FOL не учитывает мультимодальные будущие траектории, его точность страдает из-за накопленной ошибки предсказания RNN. Затем мы представляем BiTraP, метод двунаправленного мультимодального прогнозирования траектории с заданными условиями.BiTraP оценивает мультимодальные траектории и использует новый двунаправленный декодер и потери для повышения точности долгосрочного прогнозирования траектории. Мы показываем, что различный выбор непараметрических и параметрических моделей цели напрямую влияет на предсказанные мультимодальные траектории распределения. Эксперименты с двумя наборами данных FPV и шестью наборами данных с высоты птичьего полета (BEV) показывают эффективность наших методов по сравнению с современными. Мы определяем предсказание поведения пешехода как комбинацию действия и намерения.Мы выдвигаем гипотезу о том, что текущие и будущие действия являются приоритетом сильных намерений, и предлагаем многозадачную обучающуюся сеть кодировщика-декодера RNN для обнаружения и прогнозирования будущих действий пешеходов и намерений перехода улиц. Экспериментальные результаты показывают, что одна задача помогает другой, поэтому вместе они достигают высочайшего уровня производительности с опубликованными наборами данных. Чтобы идентифицировать вероятные аномалии трафика, мы вводим метод неконтролируемого обнаружения аномалий видео (VAD), основанный на траекториях. Мы прогнозируем местонахождение участников дорожного движения в ближайшем будущем и отслеживаем точность и согласованность этих прогнозов как свидетельство аномалии.Непоследовательные прогнозы обычно указывают на то, что аномалия произошла или вот-вот произойдет. Затем для классификации обнаруженных аномалий можно применить метод распознавания контролируемого видео действия. Мы вводим метрику пространственно-временной площади под кривой (STAUC) в качестве дополнения к существующей оценке площади под кривой (AUC) и показываем, что она отражает, насколько хорошо модель обнаруживает временные и пространственные местоположения аномальных событий. Экспериментальные результаты показывают, что предложенный метод и оценка аномалий на основе согласованности более устойчивы к движущимся камерам, чем методы, основанные на генерации изображений; наш метод обеспечивает высочайшую производительность по показателям AUC и STAUC.VAD и распознавание действий поддерживают отличие интересующего события (EOI) от обычных данных о вождении. Мы представляем Smart Black Box (SBB), интеллектуальный регистратор данных о событиях, для определения приоритета данных EOI при длительном вождении. SBB сжимает данные с высокой пропускной способностью на основе потенциала EOI и ограничений встроенного хранилища. SBB предназначен для определения приоритета новых и аномальных данных о вождении и отбрасывания старых и обычных данных. Оптимальный коэффициент сжатия выбирается на основе компромисса между стоимостью данных и стоимостью хранения.Эксперименты на имитаторе дорожного движения и с наборами данных из реального мира показывают эффективность и действенность использования SBB для сбора высококачественных видеороликов при длительном вождении.Субъекты
Автономное вождение Прогнозирование траектории Прогнозирование поведения Обнаружение аномалий Интеллектуальный регистратор данных событий Smart Black BoxУчет других участников дорожного движения и возможность обгона — Технологический университет Граца
@inbook {db3599e3b80741b39141c918047d296d,
title = «Энергоэффективное вождение в динамической среде: учет других участников дорожного движения и возможность обгона»,
abstract = «В этой главе исследуется энергия эффективное вождение (полу) автономных электромобилей, работающих в динамичной среде с другими участниками движения по однонаправленной многополосной дороге.Этот сценарий считается так называемой сложной проблемой, поскольку налагаемые ограничения меняются во времени и пространстве. Если пренебречь ограничениями, налагаемыми окружающим движением, создание оптимальной по энергии траектории скорости может привести к плохим результатам с риском плохого восприятия водителем при применении в реальных условиях вождения. Существующий подход удовлетворяет ограничения окружающего движения, изменяя существующую неограниченную траекторию. В отличие от этого, предлагаемый подход включает движение ведущего транспортного средства {\ textquoteright} в качестве ограничения для создания новой оптимальной траектории скорости в глобально оптимальном смысле.Первые результаты моделирования показывают, что оптимальное энергопотребление при вождении с учетом других участников транспортного средства важно. Даже в простых установках потребляется значительно (8%) меньше энергии при увеличении времени поездки всего на 1,3% по сравнению с лучшей стратегией вождения с постоянной скоростью. Кроме того, предлагаемая стратегия вождения использует на 4,5% меньше энергии и приводит к сокращению времени в пути на 1,6% по сравнению с существующим методом обгона. Предлагаемая оптимальная стратегия вождения с использованием моделирования анализируется в различных сценариях.»,
keywords =» Следование за автомобилем, Экологическое вождение, Оптимальная скоростная траектория, Обгон «,
author =» Златан Аянович, Майкл Штольц и Мартин Хорн «,
note =» Аянови {\ ‘c}, З., Штольц , М. и Хорн, М., 2017. Энергоэффективное вождение в динамичной среде: учет других участников дорожного движения и возможность обгона. В Комплексном управлении энергопотреблением — Эко-маршрутизация и профили скорости (стр. 61-80). Springer International Publishing. «,
год =» 2017 «,
language =» Английский «,
isbn =» 978-3-319-53164-9 «,
volume =» 1 «,
series = «SpringerBriefs in Applied Sciences and Technology»,
publisher = «Springer International Publishing AG»,
pages = «61»,
booktitle = «Комплексное управление энергопотреблением — Eco Routing & Velocity Profiles»,
address = «Switzerland «,
edition =» 1 «,
}
.