
Мазепин оценил превосходство над Шумахером словами «мой лучший обгон» :: Формула-1 :: РБК Спорт
Никита Мазепин занял 17-е место. Он смог опередить второй раз за сезон своего партнера по команде «Формулы-1» Haas Мика Шумахера
Читайте нас в
Новости НовостиФото: Global Look Press
Российский пилот команды Haas Никита Мазепин после гонки на Гран-при Великобритании сказал, что это был, возможно, его «лучший обгон» за последние три года.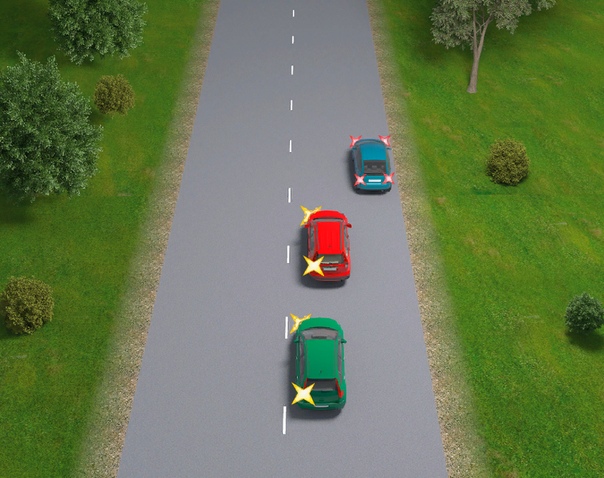 Мазепин стал 17-м и смог обойти своего партнера по команде Мика Шумахера, который занял 18-е место.
Мазепин стал 17-м и смог обойти своего партнера по команде Мика Шумахера, который занял 18-е место.
«Было тяжело и очень жарко! Уик-энд выдался позитивным. Я был очень доволен балансом машины, но мы были медлительными по сравнению с другими командами. Сегодня мы не смогли ни с кем сразиться», — цитирует Мазепина сайт Haas.
«Вначале мне пришлось сильно атаковать, чтобы попытаться выйти вперед, так как на этой трассе сложно обгонять, и шины сильно износились. Но затем я совершил, вероятно, свой лучший обгон за последние три года», — добавил россиянин.
Победу одержал британский пилот Mercedes Льюис Хэмилтон. Уже на первом круге он попытался обогнать голландца Макса Ферстаппена из Red Bull, который шел на первой позиции, во время поворота, однако поддел соперника, из-за чего Ферстаппен вылетел с трассы и пробил ограждение.
Хэмилтон обвинил госпитализированного Ферстаппена в аварииГонка прошла на автодроме «Сильверстоун».
Автор
Обгон — это.
 .. Что такое Обгон?
.. Что такое Обгон?обгон — опережение, обгонка Словарь русских синонимов. обгон сущ. • опережение Словарь русских синонимов. Контекст 5.0 Информатик. 2012. обгон … Словарь синонимов
ОБГОН — ОБГОН, обгона, мн. нет, муж. (прост.). Действие по гл. обгонять и обгоняться. «Приходи ко мне поглядеть рысака: в обгон с твоим пойдет.» Гоголь. Толковый словарь Ушакова. Д.Н. Ушаков. 1935 1940 … Толковый словарь Ушакова
обгон — ОБГОН(НЫЙ) см. обогнать. Толковый словарь Ожегова. С.И. Ожегов, Н.Ю. Шведова. 1949 1992 … Толковый словарь Ожегова
обгон — – опережение движущегося транспортного средства, связанное с выездом из занимаемое полосы (из ПДД). EdwART. Словарь автомобильного жаргона, 2009 … Автомобильный словарь
обгон — обход [Департамент лингвистических услуг Оргкомитета «Сочи 2014». Глоссарий терминов] EN Тематики спорт (общая терминология) Синонимы обход EN overtaking … Справочник технического переводчика
Обгон — Опережение движущегося транспортного средства, связанное с выездом из занимаемой полосы Источник … Словарь-справочник терминов нормативно-технической документации
Обгон — маневр, связанный с выездом транспортного средства из занимаемого ряда и опережением одного или нескольких движущихся транспортных средств. Нарушение правил О. в СССР по статистике является причиной примерно 5 6% дорожно транспортных… … Большая советская энциклопедия
Нарушение правил О. в СССР по статистике является причиной примерно 5 6% дорожно транспортных… … Большая советская энциклопедия
обгон — обгон, обгоны, обгона, обгонов, обгону, обгонам, обгон, обгоны, обгоном, обгонами, обгоне, обгонах (Источник: «Полная акцентуированная парадигма по А. А. Зализняку») … Формы слов
Обгон — опережение одного или нескольких попутно движущихся транспортных средств, связанное с выездом обгоняющего транспортного средства из занимаемой полосы. Источник: Справочник дорожных терминов … Строительный словарь
обгон — обг он, а … Русский орфографический словарь
маневр обгона должен быть понятен и виден другим водителям · Новости Архангельска и Архангельской области. Сетевое издание DVINANEWS
Самый опасный вид маневра на автомобиле, связанный с выездом на полосу встречного движения, безопасен только при трезвом уме и здравом расчете.
Даже на широкой дороге нельзя начинать маневр на авось, не убедившись в отсутствии помех на полосе обгона..jpg) Опасно находиться в чужом ряду, если завершающая часть маневра придется на изгиб дороги, крутой спуск или подъем: велика вероятность внезапного появления встречного транспорта.
Опасно находиться в чужом ряду, если завершающая часть маневра придется на изгиб дороги, крутой спуск или подъем: велика вероятность внезапного появления встречного транспорта.
После того, как выбран подходящий участок и на встречной полосе нет машин, можно увеличивать скорость в своем ряду и сокращать дистанцию до впереди идущего автомобиля. Но сначала нужно убедиться, что никто не пошел на обгон с более дальнего расстояния.
Затем надлежит включить левый сигнал поворота и выехать на встречную полосу под острым углом – маневр должен быть понятен и виден другим водителям. Увеличить динамику разгона можно, перейдя на низшую передачу. Чаще всего это третья – на ней можно непродолжительное время ехать со скоростью до 110 км/ч. Если за рулем обгоняемого автомобиля оказался хам или упрямец, соревноваться с ним на встречной полосе не следует. Лучше вернуться в свой ряд и выбрать для обгона более подходящий момент, создав преимущество в скорости.
Во время обгона важно не переключаться на повышенную передачу, поскольку это может отвлечь от контроля за ситуацией и увеличить время маневра. Опасно также совершать обгон нескольких машин, между которыми небольшая дистанция: возвращение на свою полосу может быть затруднено. Очень важно предусмотреть возможное изменение траектории обгоняемого транспортного средства, появление на встречке машины со второстепенной дороги. В связи с эти лучше отказаться от обгона, если впереди следует съезд с дороги налево или перекресток.
При обгоне нельзя ехать близко, борт к борту, с обгоняемым, особенно если это грузовик с прицепом, фура или автобус. Из-за объезда препятствия на дороге они могут вильнуть, и тогда не спасут ни тормоза, ни рулевое.
Есть еще несколько рекомендаций:
- Не начинайте обгон ради обгона – сначала подумайте, даст ли это выигрыш во времени.
- Не принимайте за оскорбление просьбу другого водителя уступить дорогу, не состязайтесь с ним в скорости.
- Не увеличивайте скорость, когда обгоняют вас.
- При обгоне не полагайтесь только на мастерство и осторожность других водителей.

- Не начинайте обгон вслед за другими водителями, пока не убедитесь в безопасности маневра.
- Прибегайте к дополнительным сигналам обгона: звуковым – днем, световым – ночью.
Управление ГИБДД УМВД России по Архангельской области.
Администрация Октябрьского района — Обгон должен быть безопасным!
26 июня 2020 года по всей Республике Беларусь пройдет Единый день безопасности дорожного движения, направленный на предупреждение ДТП в результате выезда на полосу встречного движения.
Нередко дорожно-транспортные происшествия с тяжелыми последствиями происходят в результате нарушения водителями правил обгона и маневрирования.
Обгон – это опережение одного или нескольких транспортных средств, связанное с выездом на встречную полосу движения (сторону проезжей части дороги). Так как обгон осуществляется с выездом на сторону встречного движения, то представляет повышенную опасность и требует от водителя правильных и безошибочных решений.
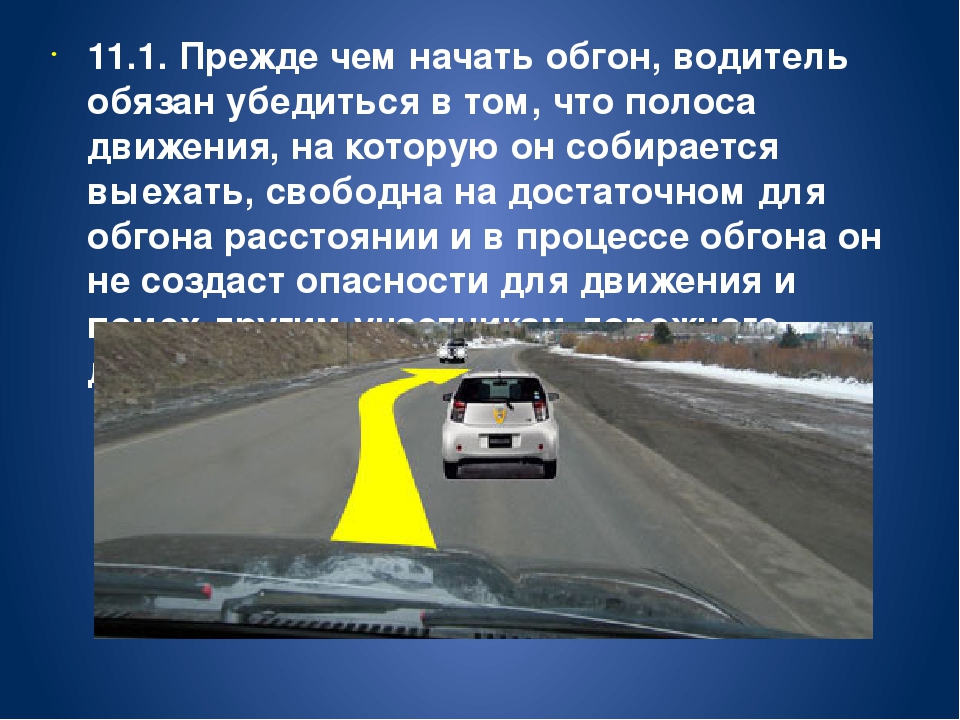
До начала обгона водитель должен убедиться в том, что полоса движения, на которую он намерен выехать, свободна и своими действиями он не создаст угрозу безопасности дорожного движения, не заставит участников дорожного движения изменить направление и (или) снизить скорость движения. Для того чтобы водитель был уверен в безопасности, ему нужно представлять, какое расстояние понадобится для обгона. Длина пути обгона зависит от скорости обгоняемого и обгоняющего автомобилей, разницы в скоростях между ними.
Для того чтобы водитель был уверен в безопасности, ему нужно представлять, какое расстояние понадобится для обгона. Длина пути обгона зависит от скорости обгоняемого и обгоняющего автомобилей, разницы в скоростях между ними.
Водителю запрещается выполнять обгон:
- если водитель транспортного средства, движущегося впереди по той же полосе движения, подал сигнал левого поворота;
- если следующие за ним водители начали обгон.
Объезд транспортного средства, водитель которого подал сигнал поворота налево и приступил к выполнению маневра, производится с правой стороны.
Водитель обгоняемого транспортного средства обязан с учетом дорожно-транспортной обстановки двигаться ближе к правому краю проезжей части дороги и не препятствовать обгону увеличением скорости движения или иными действиями.
Обгон запрещается:
в зоне действия дорожных знаков «Обгон запрещен», «Обгон грузовым автомобилям запрещен», на поворотах дороги, обозначенных дорожными знаками «Опасный поворот», «Опасные повороты», на подъемах, обозначенных дорожным знаком «Крутой подъем», а также при наличии дорожной разметки 1. 1 (за исключением обгона одиночного транспортного средства, движущегося со скоростью менее 30 км/ч), в конце подъемов и на других участках дорог с ограниченной обзорностью дороги;
1 (за исключением обгона одиночного транспортного средства, движущегося со скоростью менее 30 км/ч), в конце подъемов и на других участках дорог с ограниченной обзорностью дороги;
- на обозначенных и (или) регулируемых перекрестках;
- на пешеходных переходах и ближе 50 метров от них в обе стороны;
- транспортного средства, производящего обгон или объезд препятствия;
- при недостаточной видимости дороги;
- на мостах, путепроводах, эстакадах и под ними;
- на железнодорожных переездах и ближе чем за 100 метров перед ним.
Причины для этих запретов вполне очевидны. Кроме того, следует помнить, что обгон может быть запрещен нанесенной на проезжей части сплошной линией дорожной разметки, разделяющей транспортные потоки противоположных направлений, за исключением обгона одиночного транспортного средства, движущегося со скоростью менее 30 км/ч.
Вне населенных пунктов водитель тихоходного, тяжеловесного и (или) крупногабаритного транспортного средства, а также транспортного средства, конструкция которого, перевозимый груз или техническое состояние затрудняют его обгон, должен занять положение на дороге как можно правее, а при необходимости и остановиться, чтобы пропустить скопившиеся за ним транспортные средства.
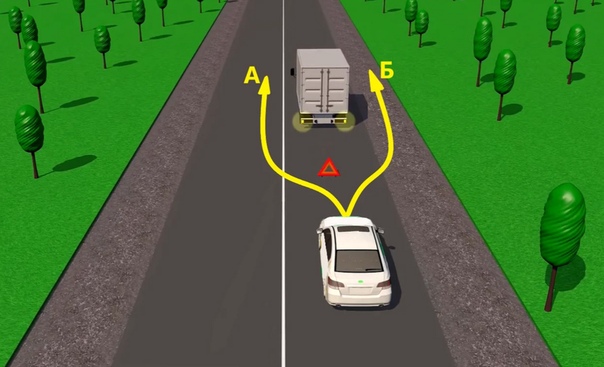
Если встречный разъезд транспортных средств затруднен, то водитель, на стороне которого имеется препятствие для дорожного движения, обязан уступить дорогу.
На уклонах, обозначенных дорожными знаками «Крутой спуск», «Крутой подъем», при наличии препятствия для дорожного движения уступить дорогу обязан водитель транспортного средства, движущегося на спуск.
За нарушение лицом, управляющим транспортным средством правил обгона либо выезд на полосу встречного движения, в случаях, когда это запрещено Правилами дорожного движения, предусмотрена административная ответственность в виде штрафа в размере от 2 до 10 базовых величин с лишением права управления транспортным средством на срок до 1 года или без лишения (ч. 8 ст. 18.14. КоАП Республики Беларусь). Если данные действия повлекли создание аварийной обстановки, то нарушителю будет грозить штраф от 5 до 20 базовых величин с лишением права управления транспортным средством до 2-х лет или без лишения (ч. 10 ст. 18.14. КоАП Республики Беларусь).S(tl1o5uldu54gbl1n43l5vmrv))/WebFiles/Pics/ipdd/12.115.1.jpg)
Уважаемые водители! Будьте предельно внимательны на дорогах и строго соблюдайте Правила дорожного движения! Помните, Вас ждут дома!
Старший инспектор по АиП ОГАИ МОБ
Октябрьского РУВД г.Минска
Виктория Царук
Если заметили ошибку, выделите фрагмент текста и нажмите Ctrl+Enter или кнопку
ГАИ Минской области проведет акцию «Безопасный обгон» 27-30 июля
26 июля, Минск /Корр. БЕЛТА/. ГАИ Минской области проведет акцию «Безопасный обгон» 27-30 июля, сообщили БЕЛТА в УГАИ УВД Минского облисполкома.
«В целях профилактики ДТП, а также пресечения нарушений правил обгона, маневрирования с 27 по 30 июля 2021 года Госавтоинспекция Минской области проведет профилактическую акцию «Безопасный обгон». В ходе профилактических мероприятий будет осуществляется негласный (смешанный) контроль за выполнением участниками дорожного движения требований ПДД с использованием транспортных средств ГАИ в стандартной (гражданской) окраске, а также технических средств фото- и видеофиксации выявленных нарушений. В первую очередь под контролем аварийно опасные участки дорог, места концентрации ДТП, в том числе по причине нарушений правил обгона и выезда на полосу встречного движения», — рассказали в УГАИ.
В первую очередь под контролем аварийно опасные участки дорог, места концентрации ДТП, в том числе по причине нарушений правил обгона и выезда на полосу встречного движения», — рассказали в УГАИ.
Правоохранители отметили: анализ дорожной обстановки свидетельствует, что на территории Минской области отмечается увеличение количества погибших и пострадавших в ДТП по причине лобовых столкновений. «Основными предпосылками совершения дорожных трагедий являются нарушение правил обгона и выезд на полосу встречного движения. Как правило, указанные происшествия влекут за собой значительную тяжесть последствий и имеют большой общественный резонанс», — добавили в ведомстве.
«За 6 месяцев этого года по причине нарушений водителями правил обгона на территории Минской области произошло пять ДТП, в результате которых один человек погиб, еще пятеро получили травмы различной степени тяжести. Всего выявлено 1745 фактов правонарушений данного характера, водители привлечены к административной ответственности», — подчеркнули в УГАИ.
ГАИ напоминает, что нарушение лицом, управляющим транспортным средством, правил обгона либо выезд на полосу встречного движения в случаях, когда это запрещено правилами дорожного движения, влекут наложение штрафа в размере от 2 до 10 БВ с лишением права управления транспортными средствами сроком до 1 года или без лишения.
«Водители, обгон — это опасный маневр, и прежде чем его совершать, необходимо убедится в его безопасности. При этом выбирайте безопасную скорость движения и будьте всегда предельно внимательными за рулем», — отметили в ведомстве.-0-
Безопасный обгон. Правила и техника
По шкале опасности манёвров на автомобиле, первое место занимает обгон. А как правильно выполнять его, создавая наименьшие риски для себя и других, обучают на специализированных курсах совершенствования навыков вождения. О некоторых правилах и приемах речь пойдет в данной статье.
А как правильно выполнять его, создавая наименьшие риски для себя и других, обучают на специализированных курсах совершенствования навыков вождения. О некоторых правилах и приемах речь пойдет в данной статье.
Азбука обгона
Начиная обгон, водитель должен удостовериться, что путь свободен: нет встречных автомобилей и любых других преград. Необходимо рассчитать расстояние и учесть обстановку. Лучше избегать выездов на встречку в местах пересечения со второстепенными дорогами, потому как выезжающие на главную автомобили могут помешать обгону.
Проверьте зеркала, чтобы убедиться, что кто-нибудь уже не начал обгон. Затем включите поворотник и дождитесь, пока он щёлкнет несколько раз. Бросьте взгляд на зеркало ещё раз, исключив риск того, что автомобиль мог спрятаться в мёртвой зоне.
Возвращайтесь на свою полосу только после того, как обгоняемый автомобиль будет виден в зеркале. Так вы не подрежете его.
Вот лишь часть ситуаций, в которых обгон запрещён:
- Туман, снег или ливень сильно ухудшают видимость.
- Обзор затруднён из-за рельефа, дорога уходит на поворот или сужается.
- Обгон запрещён разметкой или знаками.
- Автомобиль перед вами останавливается по неизвестной причине.
- Не обгоняйте длинный грузовик, поворачивающий направо. Перед началом своего манёвра он может сильно принять влево. К тому же ваш манёвр может стать неожиданностью для других.
- Кто-то перед вами уже выдвинулся на встречную для обгона, закрыв обзор.

Вероятность смерти в лобовом столкновении на скорости в 100 км/ч выше 90 %. Потому критически важно уменьшить время движения на встречной полосе. Лучше дождаться подходящего момента, чем обгонять, будучи не уверенным. Всегда нужно быть готовым, что возникнет необходимость прервать манёвр. Нет смысла идти до последнего. Однако может случиться и так, что возвращаясь назад, вы увидите, что автомобиль за вами уже прижался, к тому, который вы обгоняете, и не оставил вам места. Каждая ситуация требует своего подхода.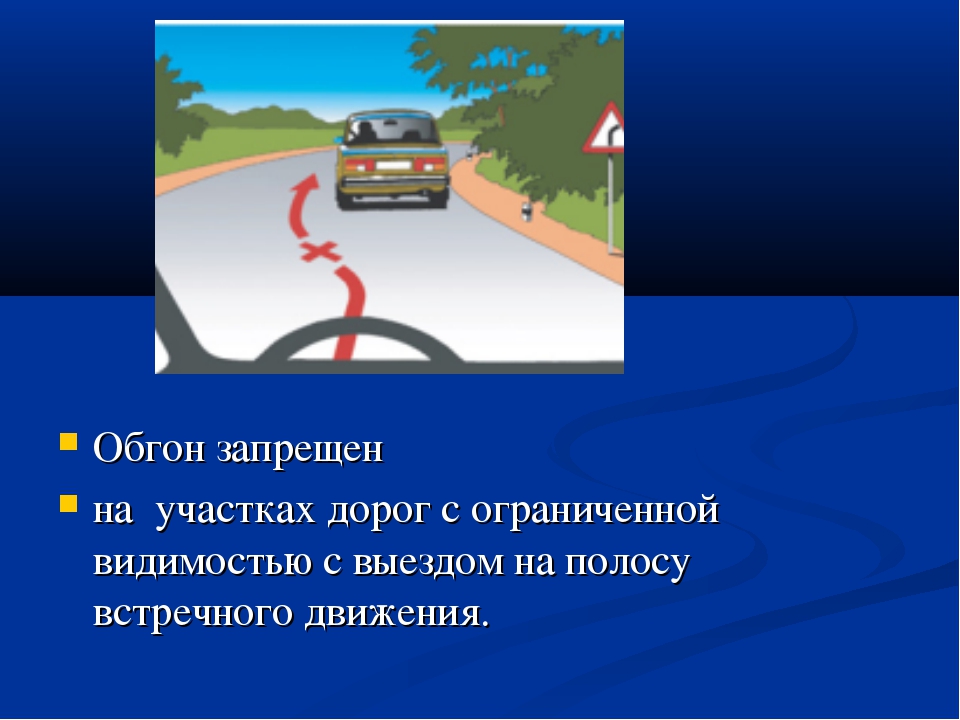
Позиция для обгона
Многие водители сильно прижимаются к автомобилю, который хотят обогнать, ошибочно полагая, что это наиболее безопасно. Но на деле происходит иначе. Когда обгоняющий займёт встречную полосу, его скорость будет такой же, как и обгоняемого. Уйдёт слишком много времени, чтобы ускориться и завершить манёвр. А на 90 км/ч автомобиль каждую секунду пролетает 25 метров.
Гораздо быстрее обгон будет выполнен, если немного отдалиться от автомобиля спереди. Так можно использовать свою полосу для разгона и выехать на встречную уже с большим запасом в скорости. И даже если дуб за рулём обгоняемого автомобиля вдруг решит устроить «гонки», у него не будет шансов прервать ваш манёвр, если он не имеет ощутимого превосходства в мощности.
Особое внимание требуется при обгоне длинных грузовиков. Кроме увеличившегося пути по встречной полосе возникают дополнительные риски, связанные с плохим обзором. У тягачей с прицепами имеются большие мёртвые зоны, водитель может просто не увидеть, что его кто-то обгоняет.
Разгон
Узнайте поближе разгонные возможности своего автомобиля на разных скоростях, чтобы лучше понимать, сколько пространства для обгона ему требуется. Имейте в виду, что динамика ухудшается при движении на подъём, особенно если салон заполнен пассажирами или грузом. Обгон должен проходить так быстро, как это позволяют условия. Это означает, что на сухом асфальте педаль газа должна быть нажата в пол. Если обороты двигателя слишком низкие (1500-2500), то следует перейти на пониженную передачу, чтобы у мотора появилась тяга.
Скорость
В плане скорости при обгоне между здравым смыслом и ПДД возникают разногласия. Наиболее безопасный обгон совершается максимально быстро. Следование же правилам только повышает опасность. Это не призыв к нарушениям, но иногда правильней превысить скорость.
Единственный обгон на Гран При России: Как это было
Телезрители Гран При России за всю гонку не увидели ни одного обгона. Тем не менее, статистика свидетельствует, что одна смена позиций, за исключением старта, всё же была: на пятом круге, между четвёртым и пятым поворотами Паскаль Верляйн опередил своего напарника по Sauber Маркуса Эриксона. Этот момент остался вне поля зрения телекамер, даже трибун в этом месте нет – обгон могли видеть разве что болельщики, собравшиеся на T4, да и то издалека, с неудачного ракурса.
Этот момент остался вне поля зрения телекамер, даже трибун в этом месте нет – обгон могли видеть разве что болельщики, собравшиеся на T4, да и то издалека, с неудачного ракурса.
Как же Верляйн это сделал? И в лучшие годы в Сочи никому не удавалось провести чистый обгон перед пятым поворотом – прямая в этом месте слишком короткая для атаки, ей предшествует медленный четвёртый поворот. Ошибок Эриксон тоже не допускал – иначе мы бы это увидели.
Завесу тайны приоткрывают данные тайминга – судя по ним, на этом круге Эриксон потерял две секунды. Верляйн проехал пятый круг почти с такой же скоростью, как и предыдущий, что довольно необычно для круга, на котором пилот проводит обгон. Секрет загадки прост – это был не обгон, а обмен позициями по приказу из боксов.
Почему же в Sauber решили поменять своих пилотов местами? Верляйн стартовал впереди напарника и первый круг провёл значительно лучше, сумев на первых метрах дистанции опередить Палмера и Стролла, в то время как Эриксон пропустил Вандорна. Но на трассу выехал автомобиль безопасности, и команда тут же позвала занимавшего последнее место Эриксона в боксы для смены шин SuperSoft на UltraSoft.
Но на трассу выехал автомобиль безопасности, и команда тут же позвала занимавшего последнее место Эриксона в боксы для смены шин SuperSoft на UltraSoft.
Верляйн тоже стартовал на SuperSoft, и так как по-прежнему был достаточно далеко, перспективы перед ним открывались не самые радужные. Поэтому на следующем круге команда позвала в боксы и его, но так как пелотон к этому моменту уже собрался, Верляйн вернулся на трассу последним, позади Эриксона.
Фактически это означало, что из-за действий команды, позвавшей сначала Маркуса, Паскаль потерял позицию, и в Sauber попросили эту позицию вернуть. Эриксон выполнил просьбу, благодаря чему в графе «Обгоны» по итогам гонки в Сочи мы и видим 1, а не 0. Верляйну это не помогло – он опять потерял позицию относительно Эриксона на втором пит-стопе.
Определение обгона по Merriam-Webster
над · взять | \ ˌŌ-vər-ˈtāk \ обогнал \ ˌŌ- vər- ˈtu̇k \; догнал \ ˌŌ- vər- ˈtā- kən \; обгонпереходный глагол
1а : , чтобы догнать
б : догнать и пройти мимо
2 : появиться внезапно
Подход, основанный на непараметрическом анализе выживаемости
Abstract
Использование немоторизованных транспортных средств в городских условиях повысило удобство поездок на короткие расстояния и уменьшило загрязнение дорожным движением. Однако поведение немоторизованных транспортных средств при обгоне значительно влияет на безопасность и эффективность движения. Целью данного исследования является моделирование продолжительности обгона на исключительной полосе для немоторизованных транспортных средств. Всего было выявлено 3010 обгонов немоторизованных транспортных средств в двух местах в Чэнду, Китай. Непараметрический анализ выживаемости был проведен для моделирования продолжительности обгона немоторизованных транспортных средств. Категориальные переменные, которые существенно влияют на продолжительность обгона, были проверены с помощью лог-рангового теста.Результаты показывают, что продолжительность обгона у гонщиков-женщин больше, чем у гонщиков-мужчин. Электровелосипедам требуется больше времени для обгона, чем обычным велосипедам. Когда немоторизованное транспортное средство находится в состоянии нагрузки (то есть пассажиры или товары на немоторизованном транспортном средстве), поведение при обгоне занимает больше времени, чем состояние без нагрузки.
Однако поведение немоторизованных транспортных средств при обгоне значительно влияет на безопасность и эффективность движения. Целью данного исследования является моделирование продолжительности обгона на исключительной полосе для немоторизованных транспортных средств. Всего было выявлено 3010 обгонов немоторизованных транспортных средств в двух местах в Чэнду, Китай. Непараметрический анализ выживаемости был проведен для моделирования продолжительности обгона немоторизованных транспортных средств. Категориальные переменные, которые существенно влияют на продолжительность обгона, были проверены с помощью лог-рангового теста.Результаты показывают, что продолжительность обгона у гонщиков-женщин больше, чем у гонщиков-мужчин. Электровелосипедам требуется больше времени для обгона, чем обычным велосипедам. Когда немоторизованное транспортное средство находится в состоянии нагрузки (то есть пассажиры или товары на немоторизованном транспортном средстве), поведение при обгоне занимает больше времени, чем состояние без нагрузки. Кроме того, на обгон немоторизованного транспортного средства с грузом требуется меньше времени, чем на обгон без груза. Когда возникает явление неправильного движения или при более высокой интенсивности движения, продолжительность увеличивается по сравнению с нормальным движением и условиями с меньшей интенсивностью движения.Результаты этого исследования призваны обеспечить более глубокое понимание поведения при обгоне немоторизованных транспортных средств в различных дорожных условиях и дать представление об исследованиях безопасности немоторизованных транспортных средств.
Кроме того, на обгон немоторизованного транспортного средства с грузом требуется меньше времени, чем на обгон без груза. Когда возникает явление неправильного движения или при более высокой интенсивности движения, продолжительность увеличивается по сравнению с нормальным движением и условиями с меньшей интенсивностью движения.Результаты этого исследования призваны обеспечить более глубокое понимание поведения при обгоне немоторизованных транспортных средств в различных дорожных условиях и дать представление об исследованиях безопасности немоторизованных транспортных средств.
Образец цитирования: Liu Y, Fu C, Wang W (2021) Моделирование продолжительности обгона между немоторизованными транспортными средствами: подход, основанный на непараметрическом анализе выживаемости. PLoS ONE 16 (1): e0244883. https://doi.org/10.1371/journal.pone.0244883
Редактор: Фэн Чен, Университет Тонги, КИТАЙ
Поступило: 2 октября 2020 г . ; Принята к печати: 17 декабря 2020 г .; Опубликовано: 29 января 2021 г.
; Принята к печати: 17 декабря 2020 г .; Опубликовано: 29 января 2021 г.
Авторские права: © 2021 Liu et al.Это статья в открытом доступе, распространяемая в соответствии с условиями лицензии Creative Commons Attribution License, которая разрешает неограниченное использование, распространение и воспроизведение на любом носителе при условии указания автора и источника.
Доступность данных: Все соответствующие данные находятся в файлах рукописи и вспомогательной информации.
Финансирование: Это исследование финансировалось Программой последипломных исследований и практических инноваций провинции Цзянсу (KYCX19_0104), Национальным фондом естественных наук Китая (No.51878166 и № 71801182), Национальная программа ключевых исследований и разработок Китая (№ 2018YFE0102700) и Совет по стипендиям Китая (CSC).
Конкурирующие интересы: Авторы заявили, что никаких конкурирующих интересов не существует.
1. Введение
Немоторизованные транспортные средства (NMV), включая обычные велосипеды и электровелосипеды, были важным компонентом системы дорожного движения во многих странах. Путешествие с NMV может принести пользу городской окружающей среде, социальной экономике и здоровью [1, 2].Многие города разработали эксклюзивные полосы для растущего спроса на немоторизованное движение в качестве вспомогательных объектов. Выделенная полоса пространственно разделяет немоторизованные и моторизованные транспортные средства, обеспечивая относительно безопасное пространство для немоторизованных транспортных средств. По мере уменьшения объема NMV, взаимодействие между немоторизованными транспортными средствами на их исключительной полосе движения становится серьезной проблемой, влияющей на эффективность и безопасность вождения NMV. Поведение при обгоне между немоторизованными транспортными средствами является часто наблюдаемым взаимодействием и потенциально влияет на нормальное вождение NMV [3].
Событие обгона происходит из-за стремления испытуемого немоторизованного транспортного средства поддерживать желаемую скорость во время езды. Значительная разница в скорости между испытуемым NMV и передним NMV дает возможность завершить общий обгон [4]. Обгон — это сложный физический и умственный процесс, который включает в себя серию действий, включая маневры при смене полосы движения, фазу ускорения и действия по замедлению [5]. Водители немоторизованных транспортных средств должны оценить поперечное пространство с целевой NMV и отрегулировать скорость и угол езды.Повышенная умственная нагрузка и давление могли возникнуть во время оценки дорожной обстановки и управления транспортными средствами. Частые изменения в управлении автомобилем и когнитивное давление могут снизить безопасность вождения и эффективность дорожного движения. Поведение при обгоне NMV является потенциальным фактором, который увеличивает вероятность столкновения и снижает уровень обслуживания. Например, обгоняющее немоторизованное транспортное средство может столкнуться с другим немоторизованным транспортным средством или бордюром из-за ложных оценок расстояния бокового проезда. Встреча может произойти между обгоняющим немоторизованным транспортным средством и движущимся в неправильном направлении NMV. Обгон НМВ может быть задним концом с передним НМВ из-за резкого изменения скорости переднего НМВ [6]. Кроме того, при нефизической изоляции и ограниченном пространстве для вождения немоторизованные транспортные средства вторгаются в полосу движения для моторизованных транспортных средств, чтобы обойти переднюю NMV, что вызывает беспорядочные условия движения и аварию NMV-MV [7].
Встреча может произойти между обгоняющим немоторизованным транспортным средством и движущимся в неправильном направлении NMV. Обгон НМВ может быть задним концом с передним НМВ из-за резкого изменения скорости переднего НМВ [6]. Кроме того, при нефизической изоляции и ограниченном пространстве для вождения немоторизованные транспортные средства вторгаются в полосу движения для моторизованных транспортных средств, чтобы обойти переднюю NMV, что вызывает беспорядочные условия движения и аварию NMV-MV [7].
Были предприняты попытки проанализировать характеристики немоторизованных транспортных средств при обгоне и факторы, влияющие на маневр обгона.Большинство исследований сосредоточено на скорости обгоняемых и обгоняемых велосипедов, пороге комфортной разницы скоростей, боковом разрыве при обгоне и мотивации обгона. Хан и др. [8] изучали скорость велосипеда во время проезда каждые 0,5 с с помощью видеозаписи и изучали взаимосвязь между скоростью обгоняющего велосипеда и обгоняемого велосипеда. В этом исследовании также сравнивалось поперечное расстояние между велосипедом и краем велосипедной дорожки во время прохождения и отсутствия прохождения.Barmpounakis et al. [9] обнаружили, что разница в скорости между обгоняющим транспортным средством и передним транспортным средством является ключевым фактором, влияющим на маневр обгона двухколесных транспортных средств с механическим приводом (PTW). Наблюдательное исследование выявило несколько факторов, влияющих на поведение при обгоне, например, есть ли пассажиры на PTW, есть ли на дороге тяжелые автомобили и есть ли явление взвода. Guo et al. [10] исследовали поперечное принятие дистанции двухколесных транспортных средств во время обгона.Результаты показывают, что допустимое поперечное расстояние для велосипедов значительно больше, чем для электронных велосипедов и электросамокатов. Zhao et al. [11] моделировали прохождения в смешанном велосипедном движении с помощью клеточных автоматов. Он указал, что электронные велосипеды способствуют прохождению событий в условиях смешанного движения.
В этом исследовании также сравнивалось поперечное расстояние между велосипедом и краем велосипедной дорожки во время прохождения и отсутствия прохождения.Barmpounakis et al. [9] обнаружили, что разница в скорости между обгоняющим транспортным средством и передним транспортным средством является ключевым фактором, влияющим на маневр обгона двухколесных транспортных средств с механическим приводом (PTW). Наблюдательное исследование выявило несколько факторов, влияющих на поведение при обгоне, например, есть ли пассажиры на PTW, есть ли на дороге тяжелые автомобили и есть ли явление взвода. Guo et al. [10] исследовали поперечное принятие дистанции двухколесных транспортных средств во время обгона.Результаты показывают, что допустимое поперечное расстояние для велосипедов значительно больше, чем для электронных велосипедов и электросамокатов. Zhao et al. [11] моделировали прохождения в смешанном велосипедном движении с помощью клеточных автоматов. Он указал, что электронные велосипеды способствуют прохождению событий в условиях смешанного движения. Насколько известно авторам, среди исследований, посвященных анализу маневров обгона немоторизованных транспортных средств, нет исследований, моделирующих продолжительность обгона. Однако продолжительность обгона отражает время экстремальной опасности, которое можно рассматривать как параметр оценки безопасности дорожного движения.Фактически, маневр с изменением полосы движения и действия по ускорению и замедлению во время процесса обгона повышают вероятность возникновения конфликтов и нарушений со стороны участников дорожного движения. Необходимо изучить продолжительность обгона NMV, чтобы повысить уровень безопасности движения и лучше понять особенности движения NMV. Дальнейшее изучение продолжительности обгона может также вдохновить политиков и проектировщиков на проектирование геометрии полосы движения для немоторизованных транспортных средств, такой как ширина полосы движения и форма изоляции.
Насколько известно авторам, среди исследований, посвященных анализу маневров обгона немоторизованных транспортных средств, нет исследований, моделирующих продолжительность обгона. Однако продолжительность обгона отражает время экстремальной опасности, которое можно рассматривать как параметр оценки безопасности дорожного движения.Фактически, маневр с изменением полосы движения и действия по ускорению и замедлению во время процесса обгона повышают вероятность возникновения конфликтов и нарушений со стороны участников дорожного движения. Необходимо изучить продолжительность обгона NMV, чтобы повысить уровень безопасности движения и лучше понять особенности движения NMV. Дальнейшее изучение продолжительности обгона может также вдохновить политиков и проектировщиков на проектирование геометрии полосы движения для немоторизованных транспортных средств, такой как ширина полосы движения и форма изоляции.
Хотя несколько исследований были посвящены продолжительности обгона NMV, исследования продолжительности обгона моторизованных транспортных средств обширны, и методы исследования могут быть использованы для справки. Например, для моделирования продолжительности обгона на шоссе с двумя полосами движения Влахогианни [12] применил подход анализа выживаемости для описания общей продолжительности обгона, продолжительности фазы разгона и продолжительности фазы обратного движения. Несколько экзогенных переменных рассматривались в модели как ковариаты, чтобы лучше понять влияние различных внешних условий на продолжительность поведения при обгоне, таких как пол, скорость и доступное пространство.В другом недавнем исследовании анализировалась продолжительность обгона мотоциклистами [13], который представляет собой другой тип двухколесного транспортного средства, но большего размера и обычно работает на бензине по сравнению с немоторизованными транспортными средствами, то есть обычными велосипедами и электрическими велосипедами. Модель продолжительности обгона, основанная на опасностях, была разработана для изучения разницы в продолжительности обгона в различных условиях движения. Анализ выживаемости, также называемый моделью продолжительности, является подходящим методом для моделирования данных продолжительности с определенным временем в качестве начального времени и конкретным событием в качестве конечной точки [14].
Например, для моделирования продолжительности обгона на шоссе с двумя полосами движения Влахогианни [12] применил подход анализа выживаемости для описания общей продолжительности обгона, продолжительности фазы разгона и продолжительности фазы обратного движения. Несколько экзогенных переменных рассматривались в модели как ковариаты, чтобы лучше понять влияние различных внешних условий на продолжительность поведения при обгоне, таких как пол, скорость и доступное пространство.В другом недавнем исследовании анализировалась продолжительность обгона мотоциклистами [13], который представляет собой другой тип двухколесного транспортного средства, но большего размера и обычно работает на бензине по сравнению с немоторизованными транспортными средствами, то есть обычными велосипедами и электрическими велосипедами. Модель продолжительности обгона, основанная на опасностях, была разработана для изучения разницы в продолжительности обгона в различных условиях движения. Анализ выживаемости, также называемый моделью продолжительности, является подходящим методом для моделирования данных продолжительности с определенным временем в качестве начального времени и конкретным событием в качестве конечной точки [14]. Он часто используется в биологии, медицине и инженерии надежности [15]. В последние годы модели выживаемости также широко применялись в транспортных исследованиях, таких как продолжительность дорожно-транспортных происшествий [16, 17], время реакции водителей на сигнал светофора [18], время ожидания водителей при переходе через дорогу [19], время реакции водителей на отвлечение мобильного телефона [20] и др.
Он часто используется в биологии, медицине и инженерии надежности [15]. В последние годы модели выживаемости также широко применялись в транспортных исследованиях, таких как продолжительность дорожно-транспортных происшествий [16, 17], время реакции водителей на сигнал светофора [18], время ожидания водителей при переходе через дорогу [19], время реакции водителей на отвлечение мобильного телефона [20] и др.
Настоящая статья направлена на моделирование продолжительности обгона немоторизованных транспортных средств на исключительной полосе для немоторизованных транспортных средств.На основании полевых съемок события обгона были собраны с помощью видеонаблюдения. Непараметрическая модель выживаемости использовалась для анализа продолжительности обгона NMV. С использованием модели Каплана-Мейера обсуждались различия в продолжительности обгона между гонщиками-мужчинами и гонщиками-женщинами, различные типы NMV (велосипеды и электровелосипеды) и дорожная обстановка.
2.
 Сбор данных
Сбор данных2.1. Место исследования
Для выбора мест проведения данного исследования использовались случайная выборка на основе карты и полевое обследование.Следующие критерии использовались для выбора потенциальных площадок для наблюдений:
- Тип изоляции между полосой движения для моторизованных транспортных средств и полосой движения для немоторизованных транспортных средств должен быть физической изоляцией. Обгон немоторизованного транспортного средства происходит как в физически изолированной, так и в нефизической изолированной полосе. Однако события обгона немоторизованных транспортных средств в пределах физической изолированной исключительной полосы движения не могут быть нарушены моторизованными транспортными средствами, и гораздо проще наблюдать за событиями и определять их продолжительность.
- Объемы NMV достаточно велики, чтобы можно было зафиксировать достаточное количество обгонов.
- Перед выбранным участком есть пешеходная эстакада для установки камеры, и направление дороги имеет хороший обзор без препятствий.
На основании вышеупомянутых критериев были выбраны два объекта в Чэнду, Китай, на основе карты Baidu Street View Map. Они были пересечением улиц Дунсю и Эрхуан-роуд (участок 1), а также пересечением улиц Тонгиин и Эрхуан-роуд (участок 2).Было проведено пилотное наблюдение, чтобы убедиться в разумности выбора двух участков для исследования. Два места были посещены на месте, чтобы проверить возможность установки видеокамеры и диапазон обзора. За движением также наблюдали в течение 15 минут, чтобы подтвердить наличие поведения при обгоне между немоторизованными транспортными средствами.
2.2. Полевое наблюдение
Данные о движении немоторизованных транспортных средств на двух подходах к перекрестку были собраны в течение января 2020 года.Погодные условия учитывались при видеозаписи. Солнечные дни были выбраны для лучшего обзора. Два места исследования были зарегистрированы с 7:30 до 9:30 и с 12:00 до 14:00 4 января -го года и 6 января -го , 2020, соответственно. Период с 7:30 до 9:30 был выбран для представления утренних часов пик, а период с 12:00 до 14:00 был выбран для представления часов пиковой нагрузки в полдень. Перед подъездами были установлены видеокамеры. Камера высокой четкости может фиксировать состояние потока немоторизованных транспортных средств на подходах в течение как минимум 2 часов и поддерживать извлечение событий обгона между NMV.На двух подходах к перекрестку было собрано в общей сложности 8 часов видеоданных.
Период с 7:30 до 9:30 был выбран для представления утренних часов пик, а период с 12:00 до 14:00 был выбран для представления часов пиковой нагрузки в полдень. Перед подъездами были установлены видеокамеры. Камера высокой четкости может фиксировать состояние потока немоторизованных транспортных средств на подходах в течение как минимум 2 часов и поддерживать извлечение событий обгона между NMV.На двух подходах к перекрестку было собрано в общей сложности 8 часов видеоданных.
2.3. Исключение поведения при обгоне между немоторизованными транспортными средствами
Видеоданные воспроизводились с помощью PotPlayer и наблюдались двумя аналитиками. Чтобы обеспечить надежность между экспертами, два аналитика были обучены понимать поведение при обгоне немоторизованных транспортных средств, продолжительность обгона и факторы, которые необходимо регистрировать во время наблюдения. Двум аналитикам дали одно и то же короткое видео для практики, а полученные данные впоследствии сравнили. Принцип заключается в том, что события обгона и факторы, извлеченные двумя аналитиками, одинаковы, а средняя разница в продолжительности обгона составляет менее 5%.
Принцип заключается в том, что события обгона и факторы, извлеченные двумя аналитиками, одинаковы, а средняя разница в продолжительности обгона составляет менее 5%.
В целом поведение при обгоне можно разделить на две фазы: этап подготовки к ускорению (этап I) и этап успешного обгона (этап II) (рис. 1). Фаза I относится к этапу, когда у гонщика появляется мотивация для обгона и он начинает изменять угол поворота и скорость для обгона.На этом этапе гонщик начинает думать, обгонять или нет, и готовится обгонять переднее немоторизованное транспортное средство. Обычно намерение обгона наиболее сильное, когда скорость переднего немоторизованного транспортного средства очень мала, что затрудняет движение заднего немоторизованного транспортного средства, и есть достаточно места для обгона. Фаза II относится к этапу после обгона, и траекторию обгоняющего гонщика можно разделить на два типа. Первый тип заключается в том, что обгоняющее немоторизованное транспортное средство возвращается в исходное положение полосы движения (рис. 1а).Напротив, некоторые гонщики предпочитают ехать прямо вперед (рис. 1b). Выбор манеры езды на втором этапе зависит от манеры езды всадника, пространства во время поездки и окружающей среды движения.
На основе иллюстраций двух типов поведения при обгоне время начала и окончания обгона можно судить по следующим принципам. Время старта — это время, когда немоторизованное транспортное средство начинает менять свою траекторию при обоих двух типах поведения при обгоне.Время окончания двух типов поведения при обгоне разное. Для поведения обгона типа I время окончания относится к времени, когда немоторизованное транспортное средство успешно обгоняет и возвращается в исходное положение полосы движения. Для режима обгона типа II конечным временем является момент, когда задняя часть немоторизованного транспортного средства обгоняет голову переднего немоторизованного транспортного средства. Общая продолжительность режима обгона — это разница между временем окончания и временем начала.
Учитывались также потенциальные факторы, влияющие на продолжительность обгона. Они включают индивидуальные факторы обгона и NMV обгона, факторы транспортного средства обгона и NMV обгона, а также факторы условий движения. Индивидуальные факторы включают пол, условия использования телефона и то, носят ли они шлемы. Факторы транспортного средства относятся к типу и состоянию нагрузки немоторизованных транспортных средств. В частности, к немоторизованным транспортным средствам относятся велосипед и электровелосипед, а статус нагрузки относится к тому, перевозят ли они пассажиров или товары.Факторы условий дорожного движения, связанные со средой катания, включают интенсивность движения, наличие парковки на улице, наличие пешеходов и немоторизованных транспортных средств, движущихся в неправильном направлении. Как правило, средний объем трафика за сигнальный цикл используется в качестве объема трафика и делится на два уровня: низкий (0–25 велосипед / цикл) и высокий (> 25 велосипедов / цикл). Неправильное движение означает движение в неправильном направлении или движение в противоположном направлении по улице [21, 22].
Они включают индивидуальные факторы обгона и NMV обгона, факторы транспортного средства обгона и NMV обгона, а также факторы условий движения. Индивидуальные факторы включают пол, условия использования телефона и то, носят ли они шлемы. Факторы транспортного средства относятся к типу и состоянию нагрузки немоторизованных транспортных средств. В частности, к немоторизованным транспортным средствам относятся велосипед и электровелосипед, а статус нагрузки относится к тому, перевозят ли они пассажиров или товары.Факторы условий дорожного движения, связанные со средой катания, включают интенсивность движения, наличие парковки на улице, наличие пешеходов и немоторизованных транспортных средств, движущихся в неправильном направлении. Как правило, средний объем трафика за сигнальный цикл используется в качестве объема трафика и делится на два уровня: низкий (0–25 велосипед / цикл) и высокий (> 25 велосипедов / цикл). Неправильное движение означает движение в неправильном направлении или движение в противоположном направлении по улице [21, 22]. Кроме того, время суток также учитывалось при записи видеоданных (т.е. утренний пик и полдень).
Кроме того, время суток также учитывалось при записи видеоданных (т.е. утренний пик и полдень).
3. Методология
В модели анализа выживаемости интересующей переменной является время продолжительности, представляющее время выживания до наступления терминального события [15]. Конечное событие в этом исследовании относится к окончанию режима обгона. Пусть T — неотрицательная переменная, представляющая время события обгона, а функция выживаемости S (t) определяется как вероятность того, что длина T больше или больше. равное заданному времени t, что означает, что событие обгона длится как минимум до времени t.S (t) определяется по формуле: (1) где F (t) — интегральная функция распределения, Pr — вероятность.
Метод Каплана-Мейера (КМ) — это типичная и наиболее часто используемая непараметрическая модель для оценки вероятности выживания данных о продолжительности жизни, также известная как «модель пределов продукта» [23]. Модель УЗ обеспечивает подход к анализу, который обсуждает влияние факторов влияния на продолжительность различными аналитическими группами. Функция выживания в модели КМ имеет вид [14]:
(2)
где t i — продолжительность точки наблюдения i (i = 1, 2, 3,…), d i — количество событий, произошедших в момент времени t i , n i — это лица, выжившие до t i (цензура не проводилась до t i ).
Функция выживания в модели КМ имеет вид [14]:
(2)
где t i — продолжительность точки наблюдения i (i = 1, 2, 3,…), d i — количество событий, произошедших в момент времени t i , n i — это лица, выжившие до t i (цензура не проводилась до t i ).
В этом исследовании все действия при обгоне были полностью записаны от начала до конца, что означает отсутствие цензуры данных. Более того, события обгона можно рассматривать как повторяющиеся события, поскольку они происходили несколько раз в течение периодов наблюдения, и время выживания для каждого события обгона было уникальным. Функцию дожития также можно вычислить с помощью рекуррентного соотношения, и она имеет следующий вид [14]:
(3)
(4)
где t j — номерj продолжительность обгона после упорядочения всех длительностей обгона от наименьшей к наибольшей, Pr ( T > t j | T ≥ t j ) — это расчетная вероятность, когда продолжительность обгон больше t j по крайней мере, а i и j являются индексами для события обгона.
Лог-ранговый тест применяется для сравнения значимой разницы между двумя или более разными аналитическими группами.Нулевая гипотеза логрангового теста состоит в том, что нет никакой разницы в вероятности выживания события в любой момент времени [24]. Логранговый тест — это непараметрический тест, который не делает никаких предположений о распределении выживаемости. По сути, тест логарифмического ранга сравнивает наблюдаемое количество событий в каждой аналитической группе с ожидаемым количеством событий, если бы нулевые гипотезы были верны, то есть способы лечения выживаемости были идентичными. Статистический показатель лог-рангового теста приблизительно распределен как статистика критерия хи-квадрат и может быть рассчитан следующим образом [14]:
(5)
(6)
где L LRS — статистика теста логарифмического ранга, O 2 — наблюдаемая оценка для второй группы, E 2 — ожидаемая оценка для второй группы, м 2 j — наблюдаемое количество событий обгона при времени t j во второй группе, e 2 j — ожидаемое количество обгонов при времени t j во второй группе, N — общее количество обгонов и j ∈ [1, N ].
4. Результаты и обсуждения
4.1. Описательная статистика
Из 8 часов видеозаписей было записано 3010 действительных образцов. В таблице 1 показано распределение продолжительности обгона, а гистограмма продолжительности обгона проиллюстрирована на рис. 2 для более наглядного отображения. Выборочные данные продолжительности обгона варьировались от 1,153 с до 9,997 с, со средним значением 3,646 с и стандартным отклонением 1,934 с. Наблюдаемая продолжительность обгона 15, 50 и 85 процентилей составила 1.68 с, 3,15 с и 5,80 с соответственно. Дальнейший взгляд на данные показывает, что большинство наблюдаемых значений продолжительности обгона составляет от 1 до 4 с.
4,2. Оценка модели выживания
В таблице 2 представлены результаты логрангового теста для различных групп. Включены только значимые аналитические группы с уровнем значимости 5%. Важными аналитическими группами являются пол обгоняющего гонщика, тип обгоняющего NMV, состояние нагрузки обгоняющего NMV и обгоняемого NMV, наличие неправильного движения и уровень интенсивности движения.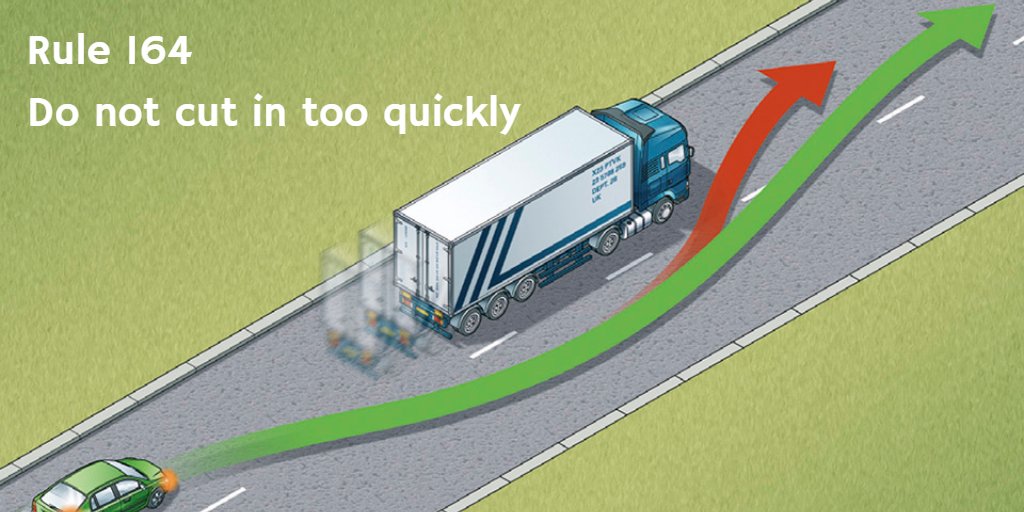
Результат модели Каплана-Мейера показывает, что гонщики-женщины в среднем ожидают большей продолжительности обгона, чем гонщики-мужчины (рис. 3). Кривая выживаемости означает, что вероятность не завершить обгон снижается с увеличением продолжительности обгона. Средняя продолжительность обгона гонщиков-мужчин и гонщиков-женщин составляет 2,73 с и 4,25 с соответственно. Для гонщиков-мужчин, когда продолжительность обгона составляет 6 с, поведение обгона в основном заканчивается.Однако, когда продолжительность составляет 6 с, функция выживаемости для женщин-всадников все еще составляет 0,2. Этот результат согласуется с тем фактом, что всадники-женщины в целом считаются более осмотрительными, чем всадники-мужчины. Наблюдательное исследование показало, что у женщин более сильное чувство безопасности и они водят медленнее, чем водители-мужчины [25]. В целом, гонщики-мужчины в среднем более опытны, чем гонщики-женщины, и более предсказуемы, чем гонщики-женщины при обгоне [26]. Кроме того, гонщики-женщины обычно оставляют больше места от пройденного NMV, чем гонщики-мужчины [27], из-за чего гонщики-женщины тратят больше времени на обгон, чем гонщики-мужчины.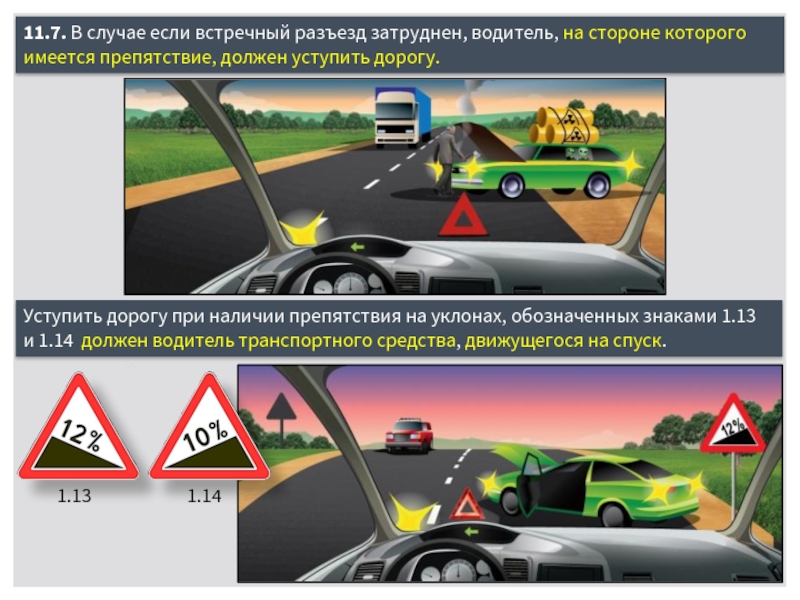
Вероятности выживаемости при продолжительности обгона для велосипедов и электровелосипедов показаны на рис. 4. Две кривые выживаемости находятся недалеко друг от друга, что указывает на то, что нет большой разницы в продолжительности обгона для велосипедов и электровелосипедов. Замечено, что электровелосипеды и велосипеды движутся по дороге со сравнимой скоростью. В целом вероятность выживания байков немного выше, чем у электровелосипеда, при той же продолжительности обгона. Одна из причин заключается в том, что электровелосипеды быстрее, чем велосипеды, из-за их различных динамических характеристик [28].Проведенное в Китае исследование времени в пути на плавающих транспортных средствах сравнило скорости велосипеда и электровелосипеда и показало, что скорость электровелосипедов на 30–35% выше, чем у велосипедов [29], что приводит к более короткому времени для электровелосипедов. -велосипеды, когда они едут на одинаковое расстояние. Другая причина заключается в том, что велосипедисты более чувствительны в процессе обгона, чем наездники на электронных велосипедах, с точки зрения безопасности. Предыдущее исследование показало, что водители электровелосипедов более рискованные, чем водители обычных велосипедов [30]. Кривые выживаемости также показывают, что после того, как продолжительность длится 6 с, две кривые выживаемости почти совпадают.Этот результат соответствует тому факту, что разница в скорости между велосипедами и электровелосипедами не очень значительна на местах наблюдения. В частности, продолжительность обгона велосипеда и электровелосипеда, соответствующая средней вероятности выживания, составляет 3,14 с и 3,31 с соответственно.
Предыдущее исследование показало, что водители электровелосипедов более рискованные, чем водители обычных велосипедов [30]. Кривые выживаемости также показывают, что после того, как продолжительность длится 6 с, две кривые выживаемости почти совпадают.Этот результат соответствует тому факту, что разница в скорости между велосипедами и электровелосипедами не очень значительна на местах наблюдения. В частности, продолжительность обгона велосипеда и электровелосипеда, соответствующая средней вероятности выживания, составляет 3,14 с и 3,31 с соответственно.
В модели Каплана-Мейера вероятности выживания при обгоне NMV с грузом и без груза показаны на рис. 5. Вероятность не завершить обгон уменьшается с увеличением продолжительности обгона.Вероятность выживания при обгоне с грузом выше, чем при обгоне без груза при той же продолжительности обгона. Результаты показывают, что немоторизованным транспортным средствам требуется больше времени для завершения обгона, когда они перевозят пассажиров или грузы. Продолжительность обгона при обгоне без нагрузки для медианы выживаемости составляет 2,72 с, в то время как соответствующее значение для обгона без нагрузки составляет 4,22 с. Для обгона без нагрузки функция выживаемости стремится к нулю, когда продолжительность составляет 6 с.Анализ КМ показывает, что функция выживаемости близка к нулю, когда общая продолжительность обгона составляет 10 с для обгона NMV с грузом. Это явление объясняется двумя причинами. Во-первых, замечено, что при обгоне NMV с грузом удаляется на большее расстояние от обгоняемого NMV в течение периода обгона. Во-вторых, скорость обгона НМВ с грузом ниже, чем без груза.
Оценка модели KM состояния нагрузки обгоняемого NMV аналогична результату состояния нагрузки обгоняемого NNV.На рис. 6 показаны функции выживаемости для продолжительности обгона, когда обгоняемый NMV происходит с нагрузкой и без нагрузки. Продолжительность обгона для средней выживаемости обгоняемого NMV с нагрузкой составляет 2,83 с, а для без нагрузки — 3,48 с. Это также указывает на то, что после того, как продолжительность обгона длится 6,2 с, две кривые вероятности выживания наклоняются, чтобы совпасть. В общем, гонщики обгоняемого NMV с грузом движутся медленнее, чем обгоняемые гонщики без груза. Судя по видеонаблюдению, обгоняемый NMV с грузом занимал больше места на дороге, чем без груза, в результате чего для обгона оставалось меньше места, чем в состоянии с пустым грузом.В этом случае обгоняющим гонщикам необходимо снизить скорость во время обгона, что приведет к увеличению продолжительности обгона.
На рис. 7 показаны вероятности выживания при неправильном движении и без него. Продолжительность обгона для средней выживаемости состояния с WWD и без WWD составляет 2,70 с и 4,47 с, соответственно. Результат показывает, что при наличии WWD вероятность выживания выше, чем без WWD. Это означает, что явление неправильного движения приводит к увеличению продолжительности обгона.Этот случай соответствует реальности, согласно которой неправильное движение является основной постоянной проблемой безопасности дорожного движения и снижает эффективность дорожного движения. Согласно предыдущему исследованию, ВВД — это явление, когда водители движутся в направлении, противоположном транспортному потоку [31]. В данной статье WWD относится к условию, при котором водители NMV движутся против основного направления немоторизованного транспортного потока. В ситуации WWD немоторизованные транспортные средства в основном направлении должны изменять скорость и угол, чтобы избежать дорожных конфликтов с немоторизованными транспортными средствами WWD.Когда основное ведущее немоторизованное транспортное средство находится в процессе обгона, продолжительность обгона будет увеличиваться из-за неправильного движения немоторизованных транспортных средств. Феномен WWD приведет к снижению пропускной способности и легко вызовет заторы на дорогах [32].
Функции выживаемости продолжительности режима обгона NMV при малом объеме трафика и большом объеме трафика показаны на рис. 8. Вероятность выжить при низком объеме трафика ниже, чем при большом объеме трафика при той же продолжительности обгона.В частности, продолжительность обгона для средней продолжительности выживаемости в условиях большого и малого трафика составляет 3,27 с и 3,11 с, соответственно. Этот результат соответствует предыдущим исследованиям. Поведенческое исследование показало, что частота нарушений в условиях немоторизованных транспортных средств с высокой плотностью движения была выше, чем в условиях немоторизованных транспортных средств с низкой плотностью движения [33]. Рост числа нарушений на дороге будет препятствовать нормальному движению транспортных средств и влиять на поведение при обгоне.Этот результат также согласуется с тем фактом, что скорость уменьшается с увеличением интенсивности движения, что приводит к более длительному поведению при обгоне.
5. Выводы
В данном исследовании применялся метод непараметрического анализа выживаемости для моделирования продолжительности обгона немоторизованных транспортных средств на исключительной полосе движения немоторизованных транспортных средств. Всего с помощью видеонаблюдений на двух подъездах к перекрестку с сигнализацией в Чэнду, Китай, было зарегистрировано 3010 случаев обгона без использования мотора.Среднее значение продолжительности, полученной с двух точек наблюдения, составляет около 4 с, а большинство наблюдаемых длительностей составляет от 1 до 4 с. Взаимосвязь между продолжительностью обгона и влияющими факторами обсуждается в модели Каплана-Мейера. Результаты показывают, что продолжительность обгона у гонщиков-мужчин значительно короче, чем у гонщиков-женщин. У разных типов немоторизованных транспортных средств разное время обгона. В частности, срок службы обычных велосипедов больше, чем у электровелосипедов.Состояние нагрузки обгоняющего немоторизованного транспортного средства увеличивает продолжительность, в то время как состояние нагрузки обгоняемых гонщиков сокращает общую продолжительность. Кроме того, если есть автомобили, которые сбились с пути, продолжительность будет увеличена. Продолжительность обгона больше при высокой загруженности, чем при низкой.
У данного исследования есть некоторые недостатки. Во-первых, в этом исследовании использовались данные только из двух мест в Китае. Привычки вождения NMV могут различаться в зависимости от дорожной обстановки и страны.В будущих исследованиях рекомендуется больше участков наблюдения и набор данных, а также в модели можно учесть неоднородность участков наблюдения. Во-вторых, продолжительность обгона, проанализированная в этом исследовании, была извлечена вручную. Начальная и конечная точки зависят от суждений наблюдателей. Новая технология, основанная на компьютерном зрении, широко используется в анализе и оценке безопасности дорожного движения [34–36]. В будущих работах можно использовать технологию отслеживания траектории для получения информации о траектории участников дорожного движения.В модели могут быть учтены такие параметры движения, как скорость, ускорение, замедление и скорость рыскания. Продолжительность обгона также может быть учтена при анализе конфликтных ситуаций и безопасности движения в дальнейших исследованиях с помощью автоматизированного анализа конфликтов на основе видео [37, 38]. В-третьих, факторы, влияющие на продолжительность обгона, анализируются аналитическими группами. Непараметрическая модель не может количественно оценить влияние переменных. В будущем исследовании будут рассмотрены параметрические модели, чтобы лучше понять факторы влияния.
Ссылки
- 1. Weinert JX, Ma C, Yang X, Cherry CR. Электрические двухколесные автомобили в Китае: влияние на поведение при поездках, переключение режимов и восприятие безопасности пользователей в городе среднего размера. Transp Res Rec. 2007; 2038 (1): 62–68. http://doi.org/10.3141/2038-08
- 2. Пучер Дж., Бюлер Р., Сейнен М. Возрождение велосипедного спорта в Северной Америке? Обновление и переоценка велосипедных тенденций и политики. Transp Res Part A Практика политики. 2011; 45 (6): 451–475.https://doi.org/10.1016/j.tra.2011.03.001
- 3. Ли З, Ван В., Шань Х, Цзинь П., Лу Дж., Ян С. Анализ событий прохождения велосипедами для оценки LOS на физически разделенных велосипедных дорогах в Китае. Ежегодное собрание TRB 2010; Вашингтон, округ Колумбия, 2010. п. 1–16.
- 4. Джамсон С., Чорлтон К., Карстен О. Может ли интеллектуальная адаптация скорости сделать обгон небезопасным? Accid Anal Пред. 2012; 48: 29–36. pmid: 22664665
- 5. Асайтамби Г., Шравани Г. Поведение транспортных средств при обгоне на неразделенных дорогах в условиях смешанного движения без полос движения.J Traffic Transp Eng. 2017; 4 (3): 252–261. https://doi.org/10.1016/j.jtte.2017.05.004
- 6. Рихтер Т., Рул С., Ортлепп Дж., Бакаба Э. Предотвращение происшествий при обгоне на двухполосных сельских дорогах. Transp Res Proc. 2016; 14: 4140–4149. https://doi.org/10.1016/j.trpro.2016.05.385
- 7. Лю Q, Sun J, Tian Y, Xiong L. Моделирование и симуляция событий обгона неоднородными немоторизованными транспортными средствами на общих участках дороги. Теория практической модели Simul. 2020; 103: 102072.https://doi.org/10.1016/j.simpat.2020.102072
- 8. Хан С.И., Раксунторн В. Характеристики прохождения и встречных маневров на эксклюзивных велосипедных дорожках. Transp Res Rec. 2001; 1776 (1): 220–228. https://doi.org/10.3141/1776-28
- 9. Бармпунакис Э.Н., Влахогианни Э.И., Голиас Й.С. Многомерное статистическое моделирование на основе технического зрения маневренности двухколесных транспортных средств при обгоне на городских магистралях. Transp Lett. 2016; 8 (3): 167–176. https://doi.org/10.1179/1942787515Y.0000000020
- 10. Го Й, Сайед Т., Заки М.Х. Изучение поведения двухколесных транспортных средств при обгоне и выбора поперечного расстояния на проезжей части общего пользования. J Transp Saf Secur. 2019: 1-21. https://doi.org/10.1080/19439962.2019.1571549
- 11. Zhao D, Wang W, Li C, Li Z, Fu P, Hu X. Моделирование прохождения событий в смешанном велосипедном движении с помощью клеточных автоматов. Transp Res Rec. 2013; 2387 (1): 26–34. https://doi.org/10.3141/2387-04
- 12. Влахогианни Э.И.Моделирование продолжительности обгона на двухполосной трассе. Transp Res Part F Поведение психологии дорожного движения. 2013; 20: 135–146. https://doi.org/10.1016/j.trf.2013.07.003
- 13. Белла Ф., Гулисано Ф. Модель продолжительности обгона мотоциклистов, основанная на опасностях. Accid Anal Пред. 2020; 141: 105522. pmid: 32283329
- 14. Дэвид Г. Клейнбаум MK. Анализ выживания: самообучающийся текст. Нью-Йорк: Спингер; 2012.
- 15. Вашингтон С.П., Карлафтис М.Г., Маннеринг Флорида.Статистические и эконометрические методы анализа транспортных данных, 2-е издание. Бока-Ратон, Флорида: Chapman & Hall / CRC; 2010.
- 16. Чунг И, Валубита Л.Ф., Чой К. Моделирование продолжительности аварий и стратегии их смягчения на южнокорейских автострадах. Transp Res Rec. 2010; 2178 (1): 49–57. https://doi.org/10.3141/2178-06
- 17. Тавассоли Ходжати А., Феррейра Л., Вашингтон С., Чарльз П. Хазард — модели продолжительности дорожно-транспортных происшествий на автостраде. Accid Anal Пред.2013; 52: 171–181. pmid: 23333698
- 18. Fu C, Zhang Y, Bie Y, Hu L. Сравнительный анализ времени реакции водителя на тормоз на сигнальных перекрестках с таймером обратного отсчета и без него с использованием параметрических моделей продолжительности. Accid Anal Пред. 2016; 95: 448–460. pmid: 26211414
- 19. Ян X, Хуан М., Абдель-Ати М., Пэн И., Гао З. Модель продолжительности, основанная на опасностях, для анализа поведения велосипедистов и велосипедистов на перекрестках с сигнализацией.Accid Anal Пред. 2015; 74: 33–41. pmid: 25463942
- 20. Хак М.М., Вашингтон С. Параметрическая модель продолжительности времени реакции водителей, отвлекаемых на разговоры по мобильному телефону. Accid Anal Пред. 2014; 62: 42–53. pmid: 24129320
- 21. Пур-Рухоламин М., Чжоу Х. Изучение факторов риска, связанных с серьезностью травм пешеходов в Иллинойсе. J Safety Res. 2016; 57: 9–17. pmid: 27178074
- 22. Фу Ц., Лю Х. Изучение факторов влияния нарушений правил дорожного движения на сигнальных перекрестках с использованием данных, собранных с камеры контроля дорожного движения.PLoS One. 2020; 15 (3): e0229653. pmid: 32130254
- 23. Каплан Е.Л., Мейер П. Непараметрические оценки по неполным наблюдениям. J Amer Statistical Assoc. 1958; 53 (282): 457–481. https://doi.org/10.1080/01621459.1958.10501452
- 24. Бланд Дж. М., Альтман Д. Г.. Тест лог-ранга. BMJ. 2004; 328 (7447): 1073. pmid: 15117797
- 25. Вэйлен А.Е., Маккенна Ф.П. Связано ли присутствие пассажира с большим или меньшим риском? 10-й семинар по поведенческим исследованиям в области безопасности дорожного движения; Лондон, 2001 год.п. 137–143.
- 26. Уокер И., Джонс К. Исследование велосипедистов в Оксфорде и Кембридже: крупномасштабное исследование пользователей велосипедов в двух крупных велосипедных городах Великобритании. Оксфорд, Великобритания: Совет графства Оксфорд-Шир; 2005.
- 27. Уокер И. Водители, обгоняющие велосипедистов: объективные данные о влиянии положения при езде, использования шлема, типа транспортного средства и очевидного пола. Accid Anal Пред. 2007; 39 (2): 417–425. pmid: 17064655
- 28. Cherry C, Cervero R. Характеристики использования и поведение пользователей электрических велосипедов в Китае при выборе режима.Политика Transp. 2007; 14 (3): 247–257. https://doi.org/10.1016/j.tranpol.2007.02.005
- 29. Черри С. Последствия использования электрических велосипедов в Китае: анализ затрат и выгод. Беркли, Калифорния: Центр городского транспорта будущего Калифорнийского университета в Беркли — Летний семинар Volvo; 2006.
- 30. Haustein S, Møller M. Безопасность электровелосипедов: факторы индивидуального уровня и характеристики инцидентов. J Transp Health. 2016; 3 (3): 386–394. https://doi.org/10.1016/j.jth.2016.07.001
- 31.Баратиан-Горги Ф., Чжоу Х. Устройства управления движением для предотвращения неправильного вождения: историческая эволюция и современная практика. J Traffic Transp Eng. 2017; 4 (3): 280–289. https://doi.org/10.1016/j.jtte.2016.07.004
- 32. Куанг X, Цао В., Ву Ю. Модель клеточного автомата немоторного потока транспортных средств с учетом обратных транспортных средств. J Syst Simul. 2016; 28 (2): 268–274.
- 33. Чжан В., Чжоу С., Хуанг В., Тао Х., Ван К., Фэн З. и др. Изучение факторов, влияющих на поведение водителей при занятии полос для движения транспортных средств на городских улицах.Accid Anal Пред. 2019; 122: 127–133. pmid: 30343164
- 34. Фу Ц., Сайед Т., Чжэн Л. Многомерное байесовское иерархическое моделирование экстремумов нестационарных конфликтов трафика для оценки сбоев. Аналитические методы исследования аварий. 2020: 100135. https://doi.org/10.1016/j.amar.2020.100135
- 35. Гуо И., Эсса М., Сайед Т., Хак М.М., Вашингтон С. Сравнение смоделированных и измеренных в полевых условиях конфликтов для оценки безопасности сигнальных перекрестков в Австралии.Transp Res Part C Emerg Technol. 2019; 101: 96–110. https://doi.org/10.1016/j.trc.2019.02.009
- 36. Guo Y, Sayed T, Zheng L, Essa M. Подход, основанный на теории экстремальных значений, для калибровки моделей микросимуляции для анализа безопасности. Теория практической модели Simul. 2021; 106: 102172. https://doi.org/10.1016/j.simpat.2020.102172
- 37. Guo Y, Sayed T, Zheng L. Иерархический байесовский подход к пику над порогом для конфликтной оценки безопасности ведущих пешеходных интервалов до и после.Accid Anal Пред. 2020; 147: 105772. pmid: 32949863
- 38. Guo Y, Sayed T, Essa M. Байесовские модели Tobit, основанные на конфликтах в реальном времени, для оценки безопасности сигнальных перекрестков. Accid Anal Пред. 2020; 144: 105660. pmid: 32623321
— История Айртона Сенны
Цель любого гонщика — опередить своих соперников и выиграть гонку. Если они позади кого-то, им нужно их обогнать.Если они лидируют, они должны делать все, чтобы их никто не обгонял. Гонка Формулы 1 на самом деле является синонимом серии обгонных маневров.
Важно отметить, что, несмотря на то, как это выглядит, обгон происходит редко, потому что одна машина лучше другой. После определенного уровня производительность как машин, так и водителей становится примерно одинаковой.
Чтобы передача произошла, водитель должен создать возможность; попытки круг за кругом выявить слабые стороны противника и заставить его совершить ошибку.Можно пройти поворот и быстрее выйти из него, выбрав лучший момент для торможения после прямой или даже рискнув всем в маневре «все или ничего». Этот рукопашный бой вызывает огромное увлечение гонками.
Если противник выходит из поворота медленнее, водитель может выдерживать безопасное расстояние, чтобы не терять инерцию, быстрее выходить из поворота и уже быть впереди на следующей прямой или даже в следующем повороте.
В случае, если водитель плохо выезжает на поворот, он может там ударить; глубокое торможение и форсирование внутреннего пути.Противник может форсировать внутренний путь, заставляя водителя обойти снаружи. Раньше этот маневр ограничивался отличными гонщиками, но с улучшенным сцеплением шин теперь его используют честолюбивые чемпионы. Однако этот тип прохождения невозможен в крутых поворотах, таких как шпильки и шиканы.
Ультрапассагены
Ультрапассагены
Ультрапассагены
Ультрапассагены
В случае, если противник обгоняет водителя на повороте, можно отплатить ему за счет слияния — области примерно в 65 ярдах позади идущей впереди машины, где сопротивление меньше — при выходе из поворота и выезде вперед. в следующем сразу или более широкий угол поворота и вынуждая соперника использовать поздний апекс, поскольку они будут бок о бок с другой машиной.
Опыт необходим для использования слипстрима. Поначалу увеличение мощности и скорости кажется только положительным, но автомобиль страдает от пониженного охлаждения двигателя, из-за которого он может выйти из строя, и уменьшения прижимной силы на колесах (автомобиль становится легче), что может вызвать аварии во время внезапной аварии. двигаться по открытой кривой. Момент выхода из слимпстрима для начала прохождения имеет принципиальное значение: если это произойдет слишком рано, противник может успеть прийти в себя, а если это произойдет слишком поздно, водитель может потерять время на торможении в повороте и потерять контакт с водителем. спереди.
Прохождение также может быть выполнено из-за ошибки соперника: будь то плохое переключение передач, пропуск апекса или позднее ускорение на выходе из поворота. Часто, когда водителя легко обгоняют, почти наверняка он или она допустили небольшую ошибку, которой другой воспользовался. Ошибки случаются внезапно и не всегда так очевидны.
Таким образом, гонщик должен заставить соперника совершать ошибки; давить на них и симулировать прохождение так, что впереди теряет концентрацию.Как и в других играх, не следует постоянно блефовать в пас; противник действительно должен верить, что гонщик попытается пройти в этот момент и в защитном движении может ошибиться в какой-то момент на трассе.
Айртон Сенна дал несколько рекомендаций водителям, которые хотели отточить маневр обгона:
«Вам следует избегать сообщать противнику, где находится ваша самая быстрая (или самая медленная) точка, чтобы он не смог подготовить защиту и вы потеряли фактор внезапности: всегда действуйте решительно, не колеблясь, когда это возможно; не следуйте ритму идущего впереди водителя и откажитесь от своего.Кроме того, используйте свой инстинкт и творческий подход, потому что если в гонках есть что-то непредсказуемое, так это прохождение ».
Защищая позицию, необходимо обращать внимание на ритм и позицию соперника, постоянно наблюдая за боковыми зеркалами, а также обнаруживая слабые места водителя позади. Даже в этой ситуации гонщик должен сохранять собственный ритм.
Оборонительную позицию следует принимать — занимая центр трассы за счет самой быстрой гоночной трассы — когда нет другой альтернативы: гонщик позади всегда будет быстрее и сможет обойти.Оборонительная позиция может быть важным защитным механизмом в начале гонки, когда все борются за позицию, и в конце гонки, когда у гонщика, находящегося позади, остается несколько кругов, чтобы обогнать лидера.
Законный обгон на проселочной дороге — проблема безопасности
Что безопасно, а что законно — это разные вещи, особенно если вы соблюдаете правила загородного обгона.
Пару недель назад Я описал нечто под названием «Австралийский обгон» — вы знаете, когда вы пытаетесь обогнать машину на автостраде, и это занимает вечность, как и 99.9 км / ч, а они разгоняются до 99,1. Это действительно вызвало отклик у людей и побудило других писателей высказаться о том, чтобы держаться левой стороны на автострадах.
Но сфабрикованное возмущение не помогает выиграть спор. Подходит холодная и жесткая логика, поэтому давайте разберемся, почему юридический обгон зачастую небезопасен.
Закон гласит, что вы не должны превышать ограничение скорости при обгоне . Он также устанавливает ограничение скорости для каждой дороги. Итак, давайте установим сцену; у нас есть проселочная дорога с лимитом 100 км / ч, по которой едет машина со скоростью 90 км / ч.Мы едем со скоростью 100 км / ч и в конце концов догоняем идущую впереди машину.
Хороший совет от правительства — поддерживать 3-секундный разрыв до идущей впереди машины . Мы сократим этот разрыв до 2 секунд, так как собираемся обгонять. На скорости 90 км / ч мы едем 25 метров в секунду, так что через 2 секунды мы видим 56 метров позади идущей впереди машины. Пройдя мимо, мы не остановимся, пока не выйдем вперед — допустим, еще две секунды, еще примерно 56 метров. Длина автомобиля составляет 5 м, поэтому общая дистанция обгона составляет 56 + 5 + 56 м = 117 м.
Итак, мы начинаем обгон, делая 100 км / ч, а другая машина разгоняется до 90 км / ч. Это разница в скорости 10 км / ч, а нам нужно преодолеть 117 метров. Скорость 10 км / ч составляет 2,8 метра в секунду (м / с), поэтому время, необходимое для обгона, составляет:
117 м / 2,8 м / с = 42 секунды. За это время вы преодолеете 1,2 км.
И это на скорости 10 км / ч. Если впереди идущий автомобиль развивает скорость 95 км / ч, а вы делаете 100 км / ч для обгона, это 84 секунды или 1 минута 24 секунды для обгона, в течение которых вы преодолеете 2,3 км.
Я сделал некоторые упрощения в расчетах, но они не меняют центральную точку — как вы относитесь к тому, что при обгоне находитесь на неправильной стороне дороги больше минуты?
Не верите? В следующий раз, когда вы будете на автостраде, начните с 2 секунд позади кого-то, обнулите счетчик пройденного пути, начните отсчет секунд и остановитесь, когда вы окажетесь на 2 секунды впереди.Это удивительно долгое время и расстояние. И это только для машины. Например, грузовик B-double имеет длину 25 м, так что это еще около 7 секунд на противоположной стороне дороги на скорости 10 км / ч.
А что насчет полосы обгона? Две проблемы. Во-первых, они не всегда доступны. Во-вторых, они, как правило, составляют 1 км в длину, и, как мы только что доказали, недостаточно расстояния, чтобы проехать 90 км на машине, если вы едете со скоростью 100 км / ч и придерживаетесь официальных указаний.
Вы можете немного сжать его и начать маневр позже или прервать его раньше — скажем, сократить время до 1 секунды до и после — но это не решает другой проблемы, которая заключается в том, что если машина движется со скоростью 90 км / ч на Умеренно загруженная проселочная дорога, скоро за ней появится хвост машин, и все они попытаются использовать одну и ту же полосу для обгона.
Кто-то сказал бы, просто дождитесь подходящего шанса. Но математика гласит, что если ваш маршрут не включает взлетно-посадочную полосу международного класса, у вас не будет места для обгона. И даже если бы для обгона оставалось 1,2 км, вы не сможете легко увидеть это расстояние по дороге, поэтому вам нужно начать обгон и просто надеяться, что он сработает. На самом деле не понимаю, насколько это безопасно. А если в обратном направлении едет машина, то в момент начала обгона она должна быть на расстоянии не менее 2,5 км.. Вам понадобится длинный участок дороги и хорошее зрение, чтобы видеть так далеко вперед.
А как насчет ожидания, а не обгона? Это было бы излюбленным решением людей, которые не ездят на большие расстояния по стране, но есть три проблемы; усталость, пробки и разочарование. Сначала усталость; На прошлой неделе я проехал 550 км до Милдьюры, и если бы мне пришлось снизить скорость на 10 км / ч, мое время в пути увеличилось бы с чуть более 6 часов до 7 часов, включая остановки. Если бы это было 80 км / ч, то это было бы еще 1.4 часа по сравнению с обычным временем.
Как безопасно проводить больше времени, скучая на пустой дороге, когда все мы знаем, что усталость — это проблема? Это не значит, что вождение без ограничений — это своего рода эффект снятия стресса.
Второй, пробки. У нас есть наша машина, прыгающая со скоростью 90 км / ч, а за ней теперь еще 10 машин, движущихся со скоростью 90. Головная машина приближается к зоне 60 км / ч и замедляется до 60. Это происходит, может быть, в 300 м от 60 км / ч. знак h. Это означает, что автомобиль позади него должен затормозить примерно в 350 метрах от знака.Автомобиль позади этого примерно 400м. Как правило, каждый водитель будет тормозить немного сильнее, чем идущий впереди автомобиль, так что это проблема как расстояния, так и скорости. Вы получаете достаточно машин, и весь транспортный поток останавливается, что вы можете видеть каждый день, когда едете на работу по автострадам — это называется «огромная загруженность дорог». Все это приводит к разочарованию, а разочарованные водители не являются безопасными водителями. И более длительное время в пути для всех. Этого можно было избежать путем обгона, чтобы разгрузить поток машин.
Так вот в чем проблема, а как насчет решения? Как насчет этого:
- Разрешить увеличение ограничения скорости на 20% при обгоне на однополосных дорогах. Это означает, что вы можете разогнаться до 120 км / ч в зоне 100, что сократит ваше время и расстояние, необходимое для обгона автомобиля со скоростью 90 км / ч, примерно до 17 секунд и 580 м, а не 41 секунды и 1,2 км — необходимо дайте немного времени подняться до 120 и обратно. Это не повышение предела скорости до 120 — это другой разговор — это просто позволяет людям быстро совершить обгон, а не сосредотачиваться на спидометре, когда им нужно смотреть далеко-далеко вперед.Вот схема того, как это выглядит:
- Поощряйте культуру «поднимайте, когда вас обгоняют». Даже небольшое ослабление педали акселератора при проезде машины делает обгон намного быстрее и, следовательно, безопаснее. Оформить штрафы тем, кто не снимает; так что мы можем иметь счастливую ситуацию, когда кто-то, совершающий обгон на скорости 120 км / ч, не будет оштрафован, в то время как автомобиль, на котором они проезжают, развивает скорость до 105 км / ч и получает штраф.
- Включите обгон и вождение на проселочных дорогах в программу обучения вождению. Потому что сейчас его там нет. Обгон действительно опасен, но этому не учат должным образом. Может быть, также добавим сюда немного контроля над усталостью, базовые навыки ремонта автомобилей и навигацию на большие расстояния. И буксировка прицепа. Но это в другой раз.
Увеличение скорости на 20% — это почти то, что в любом случае делают во всем мире. Разница с Австралией в том, что вас за это наказывают. Посмотрите на заглавное фото — белый Kluger собирает штрафы за превышение скорости, но он находится в идеальном месте для безопасного обгона.
Умолять или кричать на людей, чтобы те держались левее, не сработают, потому что вся дорожная система построена так, чтобы побуждать людей перемещаться по проселочным дорогам. Вы не можете изменить человеческую природу, но можете изменить стимулы, управляющие их поведением, и, постоянно обращаясь к водителям, власти показывают, что они не осознают этот простой факт.
И да, мы все видели, как идиот обгоняет ходы. Но вы знаете, что? Идиоты — идиоты вне зависимости от законов, а как насчет того, чтобы позволить полиции использовать свое усмотрение? То, что безопасно, не обязательно законно, а то, что законно, не всегда безопасно.Эти опытные офицеры дорожной патрульной службы знают разницу лучше, чем любой из нас. К сожалению, они должны использовать свои правила, а не свой интеллект.
Итак, что вы думаете — следует ли нам позволить ускоряться, чтобы делать обгоны, или вы счастливы провести целую вечность не по той стороне дороги или путешествуя со скоростью намного ниже вашей предпочтительной в поезде из других разочарованных машин?
Вы ускоряетесь при обгоне? Может быть, вы фатбург ..
Раздел 49-1422 — Законодательное собрание штата Айдахо
АВТОМОБИЛИ
ГЛАВА 14
ПРАВООХРАНИТЕЛЬНОЕ ДВИЖЕНИЕ И ОБЩИЕ ПОЛОЖЕНИЯ
49-1422.Обгон и проезжающий школьный автобус. (1) Водитель транспортного средства, встречающего или обгоняющего с любого направления любой школьный автобус, остановившийся на шоссе, должен остановиться перед тем, как добраться до школьного автобуса, когда на школьном автобусе действуют визуальные сигналы, указанные в разделе 49-915 Кодекса Айдахо, и водитель транспортного средства не должен продолжать движение до тех пор, пока школьный автобус не возобновит движение или не исчезнут световые сигналы. Встречный транспорт на шоссе, состоящем из более чем трех (3) полос движения, не требует остановки при встрече со школьным автобусом при включении световых сигналов.Любое лицо, признанное виновным в нарушении положений настоящего подраздела, подлежит штрафу в размере не менее двухсот долларов (200 долларов США) за первое нарушение в соответствии с настоящим подразделом; не менее четырехсот долларов (400 долларов) за второе преступление в соответствии с настоящим подразделом в течение пяти (5) лет с момента предыдущего преступления в соответствии с настоящим подразделом; и не менее шестисот долларов (600 долларов) за третье преступление в соответствии с настоящим подразделом в течение пяти (5) лет после двух (2) предыдущих преступлений в соответствии с настоящим подразделом. Несмотря на положения раздела 19-4705 Кодекса Айдахо, штрафы, налагаемые в соответствии с этим подразделом, превышающие сто долларов (100 долларов США), должны быть уплачены в фонд камеры школьного автобуса, который настоящим создается в государственной казне.Деньги в фонде могут быть использованы только для установки видеокамер на школьных автобусах для обеспечения соблюдения правил дорожного движения, установленных в этом разделе. Если к 1 июля 2024 г. не будет создана программа для управления фондом видеокамер школьного автобуса, то такие средства будут распределены в соответствии с разделом 19-4705 Кодекса штата Айдахо. (2) Каждый школьный автобус должен быть оборудован визуальными сигналами, отвечающими требованиям раздела 49-915 Кодекса Айдахо, которые должны активироваться водителем школьного автобуса всякий раз, но только тогда, когда транспортное средство останавливается на шоссе для цель приема или отчисления школьников.Водитель школьного автобуса не должен включать специальные световые сигналы:(a) В деловых районах, определенных департаментом или местными властями;
(b) на перекрестках или в других местах, где движение контролируется сигналами управления движением или офицерами службы безопасности; или
(c) В специально отведенных местах погрузки школьных автобусов, где автобус полностью находится вне проезжей части.
(3) На каждом школьном автобусе спереди и сзади должны быть четко видимые знаки, содержащие слова «ШКОЛЬНЫЙ АВТОБУС» буквами не менее восьми (8) дюймов в высоту.Когда школьный автобус движется по шоссе для целей, отличных от фактической перевозки детей в школу или из школы, вся маркировка на ней, обозначающая «школьный автобус», должна быть закрыта или скрыта.
(4) Если какой-либо школьный автобус продан и больше не будет использоваться для перевозки учеников, до того, как его снова можно будет использовать на автомагистралях этого штата, он должен быть окрашен в глянцево-желтый цвет, отличный от национального школьного автобуса. Федеральный стандарт 595а, цветовой номер 13432 и вся маркировка школьного автобуса должны быть стерты.
История:
[49-1422, добавлен 1988, гл. 265, сек. 358, стр. 751; являюсь. 2014, гл. 69, сек. 1, стр. 176; являюсь. 2019, гл. 236, сек. 1, стр. 722.]Облако вместо общих ИТ-сервисов — GCN
Облако обгоняет общие ИТ-сервисы
- Марк Роквелл
- 12 ноября 2019 г.
Облачные сервисы меняют то, как федеральные агентства покупают и используют свои ИТ, согласно ежегодному отчету Совета профессиональных услуг о том, как федеральные агентства расходуют свои бюджеты.
PSC’s Vision Forecast, который запрашивает у сотен федеральных чиновников по технологиям и закупкам информацию об их расходах на технологии, показал, что агентства переходят от традиционных общих сервисов к предоставленным облачным ИТ-сервисам.
Исследование показало, что традиционные общие сервисы, такие как те, которые предоставляются в рамках операций Unified Shared Services Management Администрации общих служб, снизились на 17% в 2019 финансовом году, по словам Стива Веттера, одного из руководителей программы PSC по ИТ-бюджету и исследованиям управления для отчета Vision.
Агентствазаменяют эти услуги «предоставленными ИТ-услугами», такими как программное обеспечение, инфраструктура и предложения «платформа как услуга», — сказали Веттер и со-руководитель Грег Лоббин.
Этот рост может быть объяснен увеличением детализации в категоризации в соответствии с Повесткой дня Президента в области управления.
Тем не менее, расходы на облачные сервисы, которые в 2019 году выросли среди агентств на 58%, показывают, что этот шаг также вызван инициативами федерального правительства по принципу «сначала облако» и «интеллектуальным облакам», в которых особое внимание уделяется технологиям.
«Облако — это форма общих сервисов, — сказал Веттер, — но подготовленные ИТ выходят за рамки общих сервисов.«Предоставленные ИТ, — сказал он, — в настоящее время составляют 18% федеральных услуг.
Более длинная версия этой статьи была впервые размещена на FCW, сайте-аналоге GCN.
Об авторе
Марк Роквелл — старший штатный писатель в FCW, специализирующийся на приобретении, Министерстве внутренней безопасности и Министерстве энергетики.
До прихода в FCW Роквелл был вашингтонским корреспондентом Government Security News, где он освещал все аспекты внутренней безопасности от информационных технологий до служебных собак и пограничной безопасности.За последние 25 лет в Вашингтоне в качестве репортера, редактора и корреспондента он освещал все более широкий спектр вопросов высоких технологий для таких изданий, как Неделя связи, Неделя Интернета, Новости волоконной оптики, журнал tele.com и Неделя беспроводной связи.
Роквелл получил премию Джесси Х. Нила за свою работу, посвященную вопросам электросвязи, и является выпускником Университета Джеймса Мэдисона.
Щелкните здесь, чтобы увидеть предыдущие статьи Rockwell. Свяжитесь с ним по адресу [адрес электронной почты защищен] или подпишитесь на него в Twitter по адресу @ MRockwell4.
ИДЕЯ УСТРОЙСТВА ДЛЯ БЕЗОПАСНОСТИ ВОДИТЕЛЯ ВО ВРЕМЯ ОБГОНА JSTOR
АбстрактныйВ статье представлена идея устройства, предназначенного для помощи водителю при обгоне в процессе принятия решения. Стратегия безопасного обгона определяется компьютером автомобиля во время движения. Основная цель этой стратегии — избежать так называемой «опасной встречи» с встречным автомобилем.Индекс риска опасной встречи постоянно рассчитывается и отображается на экране дисплея автомобиля. Рассчитываются и другие параметры стратегии безопасного обгона. В статье представлены примерные результаты компьютерного моделирования работы описываемого устройства. Содействие процессу принятия решения обгоняющим водителем имеет большое значение, прежде всего, в случае двухполосных дорог с двусторонним движением. Описанное выше устройство может составлять часть более сложной компьютерной системы для помощи водителю в процессе принятия решений в дорожном движении.
Информация о журналеНачиная с 1974 г., основные цели Обзора заключаются в объединении исследовательской работы, проводимой в области экономики транспорта, и ее органической организации в форме синтеза теории и фактов. Ситуация, с которой сталкивается транспортная экономика, — это ситуация, в которой старые проблемы еще предстоит решить, а новые были созданы благодаря более широкому спектру информации и усовершенствованным методам анализа. Кроме того, предсказуемое развитие внутренней логики теорий и формулировка новых гипотез для интерпретации сложных явлений, как экономических, так и неэкономических, становятся объектом дальнейших исследований, для которых Обзор призван стать средством выражения и сравнения. .В этом отношении важно подчеркнуть тот факт, что экономика транспорта готова воспользоваться вкладом смежных наук и объединить их для обеспечения более убедительной интерпретации реальности вместе с решениями конкретных проблем. В этих рамках ожидается, что вклады в Обзор из Италии и за ее пределами, хотя и различаются по точкам зрения и культурным особенностям, будут поддерживать строгие стандарты научной стипендии.
.