
Технические настройки радар-детекторов и комбо-устройств
Для эффективной работы Вашего радар-детектора или комбо-устройства, мы рекомендуем правильно его настроить.
Как правило, необходимо включить или выключить определенные диапазоны, чтобы избежать ложных срабатываний и при этом повысить качество работы аппарата.
В более дорогих и полупрофессиональных радар-детекторах пользователю предоставляется возможность изменять чувствительность каждого из диапазонов, настраивать автоматические режимы его приема и работы и многое многое другое. В этом разделе вы найдете рекомендуемые технические настройки для России и стран СНГ.
Краткий экскурс в радиочастоты и связанные с ними измерителей скорости:
Диапазон X
В данном диапазоне с 2008 года ни работает ни один измеритель скорости в России.
Последним радаром был СОКОЛ-М, и даже в самых глухих и отдаленных регионах и областях его Вы не встретите.
Диапазон К
В данном диапазоне работают 99% измерителей скорости в России и странах СНГ.
Основными из которых являются Скат, Оскон, Кречет, Кордон. Крис, Арена, Искра, Радис, Бинар, Стрелка, Беркут, Визир, Робот, Места а также новые радары на данных платформах.
Лазерный диапазон Laser
Чтобы встреть лазерный измеритель скорости — надо быть редким «везунчиком» 😉
Как мы всегда говорили, что лазерный радар вещь дорогая, непрактичная и сложная и от того крайне редкая. Список где вы можете встретить в Москве и области ЛИСД или АМАТА, а так же ПОЛИСКАН:
-
Ленинградское шоссе, на перегоне от МКАД до Зеленограда.
-
Горьковское шоссе на перегоне от Балашихи до Купавны.
-
Минское и Новорижское шоссе — полигон для ПОЛИСКАНОВ, там они иногда встречаются
- По неподтвержденной информации один ЛИСД есть в Ростове-на-Дону и один АМАТА в Казани.
Рекомендованные технические настройки для России по моделям и брендам
Для того, чтобы войти в режим программирования, вам необходимо зажать одновременно клавиши MRK и SEN, после чего на дисплее появится надпись «параметры». Прежде всего нужно переключить режим пользования с «новичок» (установлен по умолчанию) на «продвинутый», после чего вы сможете управлять тонкими настройками прибора.
Прежде всего нужно переключить режим пользования с «новичок» (установлен по умолчанию) на «продвинутый», после чего вы сможете управлять тонкими настройками прибора.
- «Круиз» — 20 км/ч. В данном режиме прибор принимая сигналы радаров на скорости до установленного пользователем порога будет подавать два коротких зума (давая понять, что сейчас есть сигнал и разгоняться не надо).
- «Режим индикации сигнала» — «спецификация» или «эксперт». Здесь, что вам боьше нравится кол-во источников (эксперт) или же частотный диапазон сигнала (спецификация).
- «Автообучение» — «выкл». Данный режим не будет сохранять автоматически координаты с постоянными сигналами в базу помех, тем самым не запомнит сигнал стационарной камеры, как помеху.
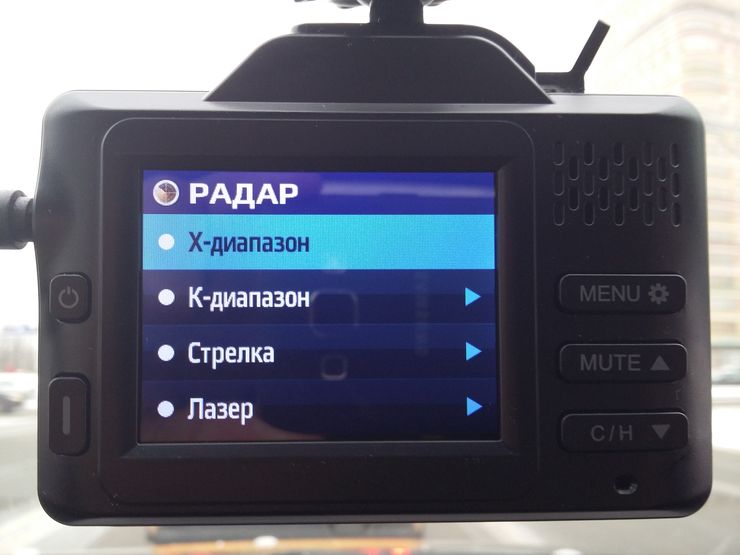
- «Х-диапазон» — «выкл». Данный диапазон в РФ и странах СНГ полностью выведен из применения и радаров работающих в нем нет.
- «К-диапазон» — «выкл», после чег ов меню появляются поддиапазоны К1 — «вкл», К2 — «вкл», К3 — «выкл».

- «СТРЕЛКА» — «вкл». При включенном режиме вы всего лишь получаете так называемый «особый сигнал на стрелку», на дисплее при ее приеме будет загораться литера «С» и голосом будет говориться «ВНИМАНИЕ СТРЕЛКА». При выключенном режиме стрелка прибор принимая его сигнал просто будет писать на дсиплее «К диапазон». Регионы, в которых есть камеры «СТРЕЛКА»: очень плотно в Московской обоасти и по всем федеральным трассам РФ в близи городов.
- «МУЛЬТИРАДАР» («Робот») — «вкл». При включенном режиме вы всего лишь получаете так называемый «особый сигнал на робот мультирадар», на дисплее при ее приеме будет загораться литера «М» и голосом будет говориться «ВНИМАНИЕ МУЛЬТИРАДАР». При выключенном режиме мультирадар прибор принимая его сигнал просто будет писать на дсиплее «К диапазон». Регионы, в которых есть камеры «Multiradar» («Робот»): Московская область, Смоленская область, Самарская область, Ульяновская область, Нижегородская область
- TSR — «выкл».
- IVT — «выкл»

-
ИНД (информация на дисплее) — Част (частота) в городе для определения частоты принимаемого сигнала в Ггц.
На трассе для отображения силы принимаемо сигнала цифрой 1-9 можно ставить режим — МУЛЬТ. -
АвтПр (автоприглушение звука) — ВЫКЛ
-
X — выкл
-
K — ХПР (гипер чувствительность выбираем для максимальной дальности приема)
-
СТ (специальный сигнал на радар Стрелка) — ВКЛ
-
Ka — выкл
-
ИМП — не имеет значения ВКЛ или ВЫКЛ
-
РДР — ВКЛ (позволяет прибору фильтровать шумы от других радар-детекторов)
-
Laser — ВКЛ (если а вас в авто есть система city safety делаем ВЫКЛ)
-
SWS — ВЫКЛ
-
АВТОСКАН — как для города, так и для трассы
-
X — ВЫКЛ
-
K — ВКЛ
-
Ka — ВЫКЛ
-
В городе режим — ГОРОД3 (в Москве сигнатурный режим «Супер Тихий)
-
Порог скорости — 50км/ч (для моделей поддерживающих эту функцию)
Отключение диапазонов поддерживается практически всеми моделями.
-
X — ВКЛ
-
K — ВКЛ
-
Ka — ВЫКЛ
-
POP — OFF
-
X/K фильтр — чем выше цифра (1-5) тем помех меньше и дальность приема при этом тоже ниже.
-
Ка фильтр — ВЫКЛ
Cobra (серия RU) | Snooper | Sho-me | Inspector | Stinger | Crunch | Star | Silver Stone | Neoline | PlayMe и прочие
Отключение некоторых диапазонов поддреживают лишь модели верхнего ценового сегмента.
- X — ВЫКЛ
- K — ВКЛ
- Ku — ВЫКЛ
- Ka — ВЫКЛ
Остальные настройки (spectre, vg-2, safety, и пр.) носят чисто маркетинговый характер и но какой пользы не несут.
Немного теории о радарах, используемых сотрудниками ГАИ и радар-детекторах, их определяющих. === Общие сведения === Антирадар — антирадаром в обиходе, зачастую, называют радар-детекторы, имея в виду одни и те же устройства. Иногда антирадарами называют “активные радар-детекторы”. Это приборы, которые выдают помеху на радар ГАИ. === Диапазоны частот, в которых работают радары ГАИ ===
На сегодняшний день в Беларуси используются радары, работающие ТОЛЬКО в X- и K-диапазонах (включая короткоимпульсные). X-диапазон K-диапазон Более свежий диапазон для полицейских и милицейских дорожных радаров с несущей частотой 24150 МГц. Ввиду меньшей длительности периода и более высокого энергетического потенциала позволяет приборам, работающим на этой частоте, иметь небольшие размеры и дальность обнаружения, в полтора раза превышающую дальность приборов, работающих X-диапазоне, плюс за меньшее время.  Так же эта частота хороша тем, что у нее более широкая полоса пропускания (100 МГц) и гораздо меньше помех по сравнению с X-диапазоном. На этом диапазоне частот базируются наши отечественные радары Беркут, Искра-1 и их модификации и фото и видео комплексы, построенные с участием локационных частей этих радаров. В настоящее время это базовый диапазон у подавляющего большинства радаров мира. Ka-диапазон Самый новый диапазон для полицейских и милицейских дорожных радаров с несущей частотой 34700 МГц. Считается наиболее перспективным диапазоном за счет опять же еще меньшей длительности периода и более высокого энергетического потенциала, позволяющего данным приборам иметь дальность обнаружения до 1.5 км с высокой точностью за минимально короткое время. Этот диапазон имеет самую широкую полосу пропускания (1300 МГц), в счет чего его назвали SuperWide (сверхширокий) и полное отсутствие бытовых и иных помех, мешающих определению скорости пеленгуемого объекта.  На этом диапазоне частот очень мало практических и широкоиспользуемых радаров в России, в счет того, что только начали осваивать КБ в России. Это рабочий диапазон будущих радаров, наиболее эффективный для повсеместного применения. Ожидается его полное лицензирование в ближайшие 2-3 года. Ku-диапазон Один из редких диапазонов, используемый в некоторых европейских странах и ранее ожидался у нас, работающий на частоте 13450 МГц. Камнем преткновения на деле послужило спутниковое телевидение, работающее в этом диапазоне, и поэтому в России нет и уже не будет таких радаров. А в Европе, и даже в Прибалтике пока что добрая половина парка дорожных радаров работает на этой частоте. Редкий рабочий диапазон, являющийся истинно европейским, но не имеющий практического будущего. VG-2 — защита от нападения Почти во всех европейских странах и некоторых штатах Америки местным законодательством запрещено использование радар-детекторов.  Чтобы обеспечить отлов незаконного прибора, существуют несколько специальных высокочувствительных радаров, работающих на на частоте 13000 МГц, именуемыми VG-1,VG-2,VG-3 и аналогичными. Суть технологии такова — машина облучается данным радаром. Радар-детектор, в подавляющем своем большинстве основанный на супергетеродине, произведет обработку этого сигнала. В процессе усиления этого сигнала и до того, как он пойдет на обработку в радар-детекторе, радар-детектор выдаст этот сигнал-эхо в эфир. Т.е. произойдет обычное для усилителя-гетеродина и неизбежное излучение усиленного сигнала. Радар VG-2 засекает этот эхо и выдает, что в том месте с большой долей вероятности находится радар-детектор. Чтобы уберечь себя и кошелек владельца, в настоящее время почти все производители радар-детекторов позаботились об этом, и имеют различные технологии маскирования от незваных гостей. Лазерный диапазон С начала 90-х годов впервые появились лазерные дальномеры и измерители скорости, основанных на отражения узконаправленного луча лазера от препятствия.  Скорость вычислялась по простым алгоритмам, путем подачи нескольких коротких импульсов через строго определенный промежуток времени измеряя расстояния до цели от каждого отражения этого импульса. В итоге получалась некая средняя составляющая, которая и выводилась на экран. Принцип прост и не изменился с тех пор и до сегодняшних дней, но с каждым новым витком эволюции таких дальномеров менялась частота импульсов и длинна луча лазера. Почти все современные радар-детекторы встроены сенсоры для приема лазерного диапазона. Принимаемая длина волны которых колеблется от 800 нм до 1100 нм. Имеются так же недостатки, присущие приборам, используемых лазерный диапазон — они не любят дисперсионный препятствия (осадки, туман и т.д.), вследствие чего данные приборы используются только в сухую погоду. Наличие приема данного диапазона важно в большинстве своем лишь в мегаполисах, где сотрудники ГИБДД имеют дорогую технику для отслеживания скоростного режима. В конце 90-х годов прошлого века сменилась эпоха постоянно действующих радаров X, K и Ka диапазонов на более быстрые и неуловимые короткоимпульсные радары. Данные устройства имеет импульсную форму определения скорости — небольшой очередью модулированнх сверхкоротких импульсов (короткоскважных) с короткой длительностью основного импульса порядка 0.3-0.4 секунды. Данную форму не понимают многие радар-детекторы и просто не обрабатывают ее, считая это помехой. Специально для таких радаров были разработаны многими компаниями новые алгоритмы по определению таких форм. Названий они получали много, но утвердились лишь немногие: — Ultra-X — OEM-короткоимпульсный режим диапазона X; Режим POP™ является международным стандартом, которому придерживаются мировые лидеры по разработке детекторов. Российские производители компания «Симикон» и «Ольвия» так же поддерживают этот стандарт. Режимы Ultra-X, Ultra-K — это собственные обобщенные названия режимов определения импульсных сигналов от производителей Кореи и Китая. ВНИМАНИЕ! Бесплатные консультации по радар-детекторам:
8 (029) 765 88 01 (МТС) |




рейтинг топ-5 по версии «КП»
Этот радар-детектор во многом схож своими характеристиками с лидером нашего рейтинга лучших. Из основных различий отметим тот факт, что RD-202 не является сигнатурным радар-детектором, но у него имеется интеллектуальный фильтр ложных срабатываний. В целом можно сказать, что обе модели заслуживают высоких оценок. Вновь обращаем внимание на удачный технологичный дизайн. Такое устройство приятно выглядит в любой машине и органично вписывается в интерьер салона. К тому же его габариты делают устройство одним из самых компактных в мире.
К тому же его габариты делают устройство одним из самых компактных в мире.Как и у старшей модели в этой линейке бренда, у этого устройства есть вычисление средней скорости для контроля во время проезда комплексов «Автодория», обнаружение скрытых устройств «Стрелка» и большая база данных. Не забывайте обновлять ее при покупке, и в целом хотя бы раз в пару месяцев подключать технику к ПК, чтобы быть в курсе камер не только в России, но также в Украине, Белоруссии, Казахстане, Узбекистане, Литвы, Латвии, Эстонии и Финляндии. Что же касается самого радара, то здесь все сделано по последнему слову техники. GPS -информатор имеет постоянно обновляемую базу, с информацией обо всех полицейских камерах, лежачих полицейских, камерах контроля полосы движения и проезда на красный свет, камерах, измеряющих скорость в спину, камерах об объектах контроля нарушения ПДД (полоса ОТ, обочина, «зебра», стоп-линия, «вафля», проезд на красный свет и д.р.). Отдельно стоит еще раз отметить интеллектуальный фильтр ложных срабатываний, который помогает не реагировать на лишние помехи в мегаполисе. Есть возможность установить свои гео-точки, при подъезде к которым прозвучит оповещение, или наоборот отметить «точки тишины». Тогда в этих координатах не будет звукового оповещения, а лишь вывод уведомления на четкий и яркий OLED- дисплей.
Есть возможность установить свои гео-точки, при подъезде к которым прозвучит оповещение, или наоборот отметить «точки тишины». Тогда в этих координатах не будет звукового оповещения, а лишь вывод уведомления на четкий и яркий OLED- дисплей.
+ Миниатюрное устройство с полным набором всех необходимых функций
+ 100% защита от полицейских камер
— Перед первым использованием нужно обновить ПО через компьютер
Характеристики
Диапазоны X,K, Ka, Ku, L, обнаружение комплекса «Multradar», поддержка Ultra-K, Ultra-X, POP, три режима, функция OSL (режим комфортного оповещения о приближении к системам контроля скорости), функция OCL (режим порогового значения превышения скорости при срабатывании), GPS — информатор, база стационарных радаров, электронный компас.
Испытания автомобильных радаров в присутствии стандартных помех
Контрольно-измерительное решение
Гибкое и простое в использовании решение для формирования стандартных помех от Rohde & Schwarz обеспечивает передовой подход к испытаниям автомобильных радаров на всех этапах: от исследования и разработки до окончательных приемочных испытаний, а также во время последующей эксплуатации. Также предусмотрена возможность испытаний ожидаемых в будущем новых сигналов для любых типов автомобильных радарных датчиков.
Также предусмотрена возможность испытаний ожидаемых в будущем новых сигналов для любых типов автомобильных радарных датчиков.
Измерительная установка включает высокоэффективное ПО, векторный генератор сигналов в качестве передатчика и умножитель частоты. ПО R&S®Pulse Sequencer может использоваться для формирования любого типа сигнала стандартной помехи с произвольной модуляцией, положением в пространстве, перемещением и диаграммой направленности антенны. Можно даже имитировать сложные ВЧ-среды с различными сигналами и источниками стандартных помех.
Заданные сигналы посредством локальной сети или USB-накопителя передаются в векторный генератор сигналов, например R&S®SMW200A. Векторный генератор сигналов с помощью внутренних широкополосных аппаратных средств для модулирующих сигналов формирует сигналы с I/Q-модуляцией с полосой до 2 ГГц на радиочастотах диапазона ISM 24 ГГц. Дополнительный умножитель частоты R&S®SMZ90 способен выполнять преобразование с повышением сформированных сигналов с фазовой или частотной модуляцией, а также импульсных сигналов в диапазоны 77 ГГц и 79 ГГц. В случае непроводящих сред используется специальная антенна, чтобы передавать испытательные сигналы в испытуемое устройство. Это компактное испытательное решение для формирования стандартных помех обеспечивает реалистичную имитацию сигналов помех для радара с настраиваемыми параметрами во всех диапазонах автомобильных радаров.
В случае непроводящих сред используется специальная антенна, чтобы передавать испытательные сигналы в испытуемое устройство. Это компактное испытательное решение для формирования стандартных помех обеспечивает реалистичную имитацию сигналов помех для радара с настраиваемыми параметрами во всех диапазонах автомобильных радаров.
Решение также можно использовать на ранних этапах исследований и разработки, чтобы проанализировать характеристики автомобильных радаров в электромагнитных средах с большим количеством помех.
СОПОСТАВЛЕНИЕ СУДОВЫХ РАДАРОВ, РАБОТАЮЩИХ В S-, X-, K- ДИАПАЗОНАХ
Полная библиографическая ссылка: Горобцов А. П. СОПОСТАВЛЕНИЕ СУДОВЫХ РАДАРОВ, РАБОТАЮЩИХ В S-, X-, K- ДИАПАЗОНАХ / Александр Петрович Горобцов, Александр Николаевич Маринич, Юрий Матвеевич Устинов // Вестник Государственного университета морского и речного флота имени адмирала С. О. Макарова. — 2018. — №5(51). — C. 1087-1093. DOI: 10.21821/2309-5180-2018-10-5-1087-1093
DOI: 10.21821/2309-5180-2018-10-5-1087-1093
СОПОСТАВЛЕНИЕ СУДОВЫХ РАДАРОВ, РАБОТАЮЩИХ В S-, X-, K- ДИАПАЗОНАХ
АннотацияВ статье проводится сравнительный анализ судовых радиолокационных станций (РЛС), работающих в S- и X-диапазонах. Кроме того, дана оценка распространенности РЛС, излучающих в К -диапазоне, которые используются при работе судов во льдах, на береговых объектах управления движением судов (для защиты портов и терминалов), а также в исследовательских разработках. Задача выбора судовых радиолокационных станций актуальна для судовладельцев при оснащении новых судов или обновлении навигационного оборудования судна. Возможности судовых РЛС могут быть в определенной степени адаптированы к условиям радиолокационного наблюдения районов плавания судна. В первую очередь это применимо к судам, спроектированным для работы в конкретных районах плавания, например, к ледоколам. Из сопоставления РЛС следует, что S-радары имеют большую дальность обнаружения целей, большую мощность передатчиков и большие размеры антенн при одинаковой их направленности. Длины антенн пропорциональны длине волны используемых диапазонов частот. Показано, что соотношение между дальностью обнаружения целей и выходной мощностью эксплуатируемых РЛС не соответствует основному уравнению радиолокации, так как в уравнении не учитываются ослабление мощности зондирующих сигналов в стандартной атмосфере Земли и при различных погодных условиях, а также изменение дальности в условиях рефракции радиоволн. Для повышения эффективности радиолокационного наблюдения предлагается размещать на судах К -радары, находящиеся в опытной эксплуатации, после дополнительных испытаний с меньшей длительностью зондирующих импульсов при условии повышения спроса на работу судов в ледовых условиях.
Длины антенн пропорциональны длине волны используемых диапазонов частот. Показано, что соотношение между дальностью обнаружения целей и выходной мощностью эксплуатируемых РЛС не соответствует основному уравнению радиолокации, так как в уравнении не учитываются ослабление мощности зондирующих сигналов в стандартной атмосфере Земли и при различных погодных условиях, а также изменение дальности в условиях рефракции радиоволн. Для повышения эффективности радиолокационного наблюдения предлагается размещать на судах К -радары, находящиеся в опытной эксплуатации, после дополнительных испытаний с меньшей длительностью зондирующих импульсов при условии повышения спроса на работу судов в ледовых условиях.
S-радар, X-радар, К -радар, дальность обнаружения цели, выходная мощность передатчика, длина антенны, влияние погодных условий, рефракция радиоволн, S-radar, X-radar, Ka-radar
Читать полный текст статьи: PDFСписок литературыМаринич А. Н. Современные судовые и береговые радиолокационные станции (радары) отечественных и зарубежных фирм: монография / А. Н. Маринич [и др.]. — Петропавловск-Камчатский: Изд-во КамчатГТУ, 2012. — 166 c.
Н. Современные судовые и береговые радиолокационные станции (радары) отечественных и зарубежных фирм: монография / А. Н. Маринич [и др.]. — Петропавловск-Камчатский: Изд-во КамчатГТУ, 2012. — 166 c.
Афанасьев В. В. Судовые радиолокационные системы: учеб. / В. В. Афанасьев [и др.]; под ред. Ю. М. Устинова. — СПб.: Веленара, 2009. — 365 с.
Дуров А. А. Судовые радионавигационные приборы: учеб. / А. А. Дуров [и др.]. — Петропавловск-Камчатский: КамчатГТУ, 2010. — Ч. 1: Радиолокационные станции. — 264 с.
Горобцов А. П. Технические средства судовождения: учебник / А. П. Горобцов [и др.]; под ред. Ю. М. Устинова. — СПб.: Морстар, 2016. — Т. 3: Судовые приборы электронной навигации. — 472 с.
Маринич А. Н. Радиолокационное обнаружение нефтяных пятен на взволнованной морской поверхности / А. Н. Маринич, А. В. Припотнюк, Ю. М. Устинов // Научно-технический сборник Российского морского регистра судоходства. — 2014. — № 37. — С. 64-69.
Pasya I. Joint direction-of-departure and direction-of-arrival estimation in an ultra-wideband MIMO radar system / I. Pasya, N. Iwakiri, T. Kobayashi // Radio and Wireless Symposium (RWS), 2014 IEEE. — IEEE, 2014. — Pp. 52-54. DOI: 10.1109/RWS.2014.6830115.
Pasya, N. Iwakiri, T. Kobayashi // Radio and Wireless Symposium (RWS), 2014 IEEE. — IEEE, 2014. — Pp. 52-54. DOI: 10.1109/RWS.2014.6830115.
Маринич А. Н. Сравнительная оценка информативности судовой РЛС/САРП в режимах радиолокационного измерения и OVERLAY с использованием данных АИС-целей / А. Н. Маринич [и др.] // Эксплуатация морского транспорта. — 2012. — № 4 (70). — С. 21-23.
Маринич А. Н. Мешающее действие туманов и снежных метелей на работу РЛС на трассе Северного морского пути / А. Н. Маринич, Ю. М. Устинов // Эксплуатация морского транспорта. — 2010. — № 4 (62). — С. 46-47.
Афанасьев В. В. Негативное влияние сложных погодных условий на работу радиолокационной станции на трассе Северного морского пути / В. В. Афанасьев, А. Н. Маринич, Ю. М. Устинов // Научно-технический сборник Российского морского регистра судоходства. — 2011. — № 31. — С. 296.
Афанасьев В. В. Оценка мешающего действия дождя на работу 10, 3 и 0,9-см радиолокационных станций / В. В. Афанасьев, А. Н. Маринич, Ю. М. Устинов // Эксплуатация морского транспорта. — 2009. — № 1 (55). — С. 21-24.
Н. Маринич, Ю. М. Устинов // Эксплуатация морского транспорта. — 2009. — № 1 (55). — С. 21-24.
Lothes R. Radar Vulnerability to Jamming / R. N. Lothes, M. B. Szymansky, R. G. Wiley. — Norwood, MA, Artech House, 1990. — 258 p.
Шахнов С. Ф. Расчет функции ослабления поля контрольно-корректирующих станций с учетом влияния подстилающей поверхности / С. Ф. Шахнов // Вестник Государственного университета морского и речного флота имени адмирала С. О. Макарова. — 2015. — № 1 (29). — C. 116-123. DOI: 10.21821/2309-5180-2015-7-1-116-123.
Matrosov S. Y. Prospects for Measuring Rainfall Using Propagation Differential Phase in X- and Ka-Radar Bands / S. Y. Matrosov, R. A. Kropfli, R. F. Reinking, B. E. Martner // Journal of Applied Meteorology. — 1999. — Vol. 38. — Is. 6. — Pp. 766-776. DOI: 10.1175/1520-0450(1999)0382.0.CO;2.
Красюк В. Н. Особенности распространения радиоволн миллиметрового диапазона, перспективы их использования в современных радиотехнических системах / В. Н. Красюк, О. Ю. Платонов, А. Ю. Мельникова // Информационно-управляющие системы. — 2003. — № 4(5). — С. 33-38.
Ю. Платонов, А. Ю. Мельникова // Информационно-управляющие системы. — 2003. — № 4(5). — С. 33-38.
Горобцов Александр Петрович — кандидат технических наук, доцент
ФГБОУ ВО «ГУМРФ имени адмирала С.О. Макарова»Маринич Александр Николаевич — кандидат технических наук, доцент
ФГБОУ ВО «ГУМРФ имени адмирала С.О. Макарова»Устинов Юрий Матвеевич — доктор технических наук, профессор
ФГБОУ ВО «ГУМРФ имени адмирала С.О. Макарова»Радар-детектор SilverStone F1 Z77 PRO
SilverStone F1 Z77PRO это антирадар?
Важно различать радар-детекторы и антирадары. Радар-детектор – это прибор, предупреждающий о радаре или камере, антирадар – прибор, предназначенный для глушения сигнала радара. Антирадары запрещены в большинстве стран мира, в том числе в России и странах СНГ. И еще о запретах: автовладельцам России в какой-то степени повезло, к примеру, в странах Европы, таких как Франция, Австрия или Польша, запрещено использование радар-детекторов.
Антирадары запрещены в большинстве стран мира, в том числе в России и странах СНГ. И еще о запретах: автовладельцам России в какой-то степени повезло, к примеру, в странах Европы, таких как Франция, Австрия или Польша, запрещено использование радар-детекторов.
В чем разница между радар-детекторами SilverStone F1 Z77PRO и Z550ST?
У 77PRO есть GPS-модуль, который позволяет опознавать камеры по базе, показывать время и скорость движения
В чем отличие радар-детекторов SilverStone F1 Z77PRO и Z55PRO от Monaco и Leman?
В целом, они имеют один набор функций, но Monaco и Leman производятся на новом заводе с более качественными комплектующими, у них более «продвинутое» ПО и как следствие лучше детектируются сложные камеры.
В чем различие между Z77PRO и Monaco?
1. У Монако усовершенствованный приемник лазер-сигнала. Приёмник лазер-сигнала получил увеличенный радиус, который ловит гораздо больше сигналов.
2. Монако отличается по комплектующим (делалось на другом заводе) — они более качественные.
3. Монако является более продвинутой версией Z77PRO.
4. К Монако уже написан новый Updater — программа по обновлению прошивок и баз камер.
5. Z77PRO уже снят с производства и больше выпускаться не будет.
6. Монако стоит дешевле, потому что собирают его на другом заводе по другим, более экономичным технологиям (что не сказывается на качестве).
Что означают буквы PRO в название модели?
Буквы PRO в название модели , означают что данный радар-детектор оснащен GPS-датчиком.
Что означает клавиша DIM на корпусе радар-детектора?
Короткое нажатие – изменение яркости дисплея. Долгое нажатие (2 сек.) – для отметки точки ложного срабатывания (или удаление точки ложного срабатывания, если она была отмечена ранее в этом месте)
Что обозначают буквы (AO) в правом углу у радар-детектора Silverstone F1 z77 pro?
АО — обозначают выбранный режим. АО — это автоматический режим.
Что означает стрелочка на экране радар-детектора SilverStone F1 Z77PRO?
Стрелка на дисплее показывает направление движения машины, вверх – движение на север, вниз – на юг, влево – на запад и вправо – на восток (промежуточные варианты – соответственно, северо-запад, юго-восток и т. д.)
д.)
Что обозначает АТО в меню устройства?
АТО (100) – выбор типа базы: одтоточечная иди двуточечная.
Параметр АТО не выставляет дистанцию, а управляет алгоритмом работы ПО по автоматической регулировке отработки GPS-оповещений на какой-либо дистанции.
Если в настройках АТО OFF дистанция оповещения берется исходя из установок дистанции установленной в базе, она может быть различной.
Если АТО=0 работает алгоритм скорости и дистанции, то есть чем выше скорость, тем больше дистанция. (например, если АТО= 80, до 80 км/ч работает алгоритм АТО=0, после 80 км/ч режим АТО OFF).
0-40 км/ч — 200 м.
40-60 км/ч — 500 м.
60-80 км/ч — 700 м.
80-100 км/ч — 800 м.
100-120 км/ч — 900 м.
от 120 км/ч — 1500 м.
Что обозначает OSPD в меню устройства?
OSPD (120) Индивидуальный выбор пользователя. После превышения лимита скорости радар-детектор будет выдавать следующее сообщение: «Внимание, снижайте скорость!» На экране появится надпись «OVDSPD».
После превышения лимита скорости радар-детектор будет выдавать следующее сообщение: «Внимание, снижайте скорость!» На экране появится надпись «OVDSPD».
Что обозначает OSL в меню устройства?
OSL (20) Лимит превышения скорости (максимум 20 км/ч)
Что обозначает AMSPD в меню устройства?
AMSPD (60) — отключены все звуковые сигналы, а дисплей будет отображать все принимаемые виды сигналов. Исключением будут стационарные точки, прописанные в базе радар-детектора.
Что обозначает AOSPD в меню устройства?
AOSPD (40) в этом режиме автоматически отключаются все диапазоны радаров / лазеров, кроме точек GPS, прописанных в базе радар-детектора.
Что обозначает ATSPD в меню устройства?
ATSPD (75) — от 0 до 120. Работает следующим образом: если AT=0, то радар-детектор работает в режиме Трасса с высокой чувствительностью. Если AT=Х, то при скорости ниже Х уровень чувствительности средний и в этом случае на дисплее отображается AT. Если скорость выше Х, то радар-детектор переходит в режим Трасса с постоянной высокой чувствительностью.
Если AT=Х, то при скорости ниже Х уровень чувствительности средний и в этом случае на дисплее отображается AT. Если скорость выше Х, то радар-детектор переходит в режим Трасса с постоянной высокой чувствительностью.
Как добавить пользовательскую точку в базу?
Нажмите кнопку Menu и удерживайте в течение 2 сек. На дисплее появится надпись «Доб-ОК». Это означает, что точка добавлена. Если точка не сохранилась, на дисплее появится надпись «Заполнен» (память прибора заполнена) или «Существ» (такая точка уже существует).
Как удалить пользовательскую точку из базы?
Удаление:
— одной точки: когда прибор оповещает о сохраненной точке, нажмите кнопку Menu и удерживайте в течение 2 сек.
— всех точек: нажмите кнопку Menu для входа в режим настроек. Выберите пункт DEL.UP. Выберите DEL.2/4/5 для удаления точек в пределах 200/400/600 м или DEL.A для удаления всех точек. Для подтверждения удаления нажмите одновременно кнопки Mute и City.
Как узнать номер прошивки Z77PRO?
1. На выключенном устройстве зажать кнопку MUTE
На выключенном устройстве зажать кнопку MUTE
2. Включить устройство колёсиком, удерживая кнопку и на экране сначала появится версия базы радаров номер прошивки, следом — версия прошивки.
3. Версия баз и прошивки отображается в формате ГГГГММДД.
Для чего нужна перезагрузка прибора и как ее выполнить?
После обновления прошивки, базы радаров, а также если радар-детектор «зависает» или начинает некорректно работать, необходимо сделать сброс настроек.
Есть два варианта:
1) Полный сброс (рекомендуется после смены прошивки или при ошибках в работе прибора) — нажав и удерживая кнопку «CITY», включите устройство повернув колесо громкости. Прозвучит двойной звуковой сигнал, на дисплее должно появиться F-RESET.
2) Сброс с сохранением пользовательских настроек (можно делать после смены только базы радаров) — нажав и удерживая кнопку «MENU», включите устройство повернув колесо громкости. Прозвучит двойной звуковой сигнал, на дисплее должно появиться U-RESET.
Как подключить радар-детектор SilverStone F1 Z77 PRO к компьютеру?
С помощью USB кабеля, который входит в комплект.
Самопроизвольно включается / выключается радар-детектор SilverStone F1 Z77 PRO. Что делать?
Скорее всего от платы отошёл контакт. Радар-детектор стоит отнести в ремонт (в магазин по месту покупки).
Радар-детектор плохо ловит GPS-сигнал, в чем может быть причина?
Во-первых, «холодный старт» — запуск после длительного отключения или после перезагрузки. Холодный старт занимает больше времени, чем «горячий старт» (запуск после отключения на недолгое время).
Во-вторых прием GPS-сигнала также зависит от погоды: если сильная облачность, связь со спутниками устанавливается дольше.
В-третьих, важно корректно проводить обновление прошивки и базы данных, не забывая производить перезагрузку радар-детектора. Некорректное обновление или перезагрузка может повлиять на работу GPS-модуля. Для решения проблему рекомендуется еще раз произвести обновление радар-детектора.
Для решения проблему рекомендуется еще раз произвести обновление радар-детектора.
На радар-детекторе SilverStone F1 Z77 PRO пропала связь со спутниками.
1) Удостоверьтесь, что вы сделали обновление прошивки. Помогло ли данное действие решить проблему?
2) Сделайте сброс к заводским настройкам (через MENU и CITY). Появилась ли связь со спутниками? Если нет значит → gps-модуль по какой-то причине пришёл в негодность.
3) Если вы не роняли, не топили, не замораживали аппарат → его необходимо сдать по гарантии в магазин, где покупали. Радар-детектор заберут на диагностику, по результатам которой аппарат будет либо отремонтирован (заменён gps-модуль), либо произведён обмен на новый. Гарантия производителя — 1 год.
Зачем нужны обновления для радар-детектора SilverStone F1 Z77PRO?
Как и другие устройства, радар-детектор обладают программным обеспечением, которое нуждается в периодическом обновлении. Мы стремимся постоянно совершенствовать свои устройства, поэтому время от времени выпускаем обновленные версии программного обеспечения.
Обновление — это способ бесплатного устранения ошибок, повышения производительности и скорости работы, а также расширения функциональности. Как правило, при обновлении программного обеспечения повышается стабильность и улучшаются общие характеристики для более комфортной работы пользователей с нашими устройствами. Иногда эффект от обновления практически незаметен, однако оно необходимо для того, чтобы избежать проблем в будущем.
Новое программное обеспечение выпускается постоянно. Однако момент его появления в свободном доступе и график выхода соответствующих обновлений зависят от модели радар-детектора.
При обновлении радар-детекторов SilverStone F1 Z55PRO и SilverStone F1 Z77PRO возникает ошибка, пишет ERROR!
Скорее всего таким образом антиспам блокирует стороннее ПО. Необходимо отключить антивирусы, попробовать запустить программу от имени администратора и заново перепрошить.
При обновлении радар-детектора SilverStone F1 Z77PRO пишет unknown device и не включается в машине
Эта надпись означает, что прошивка установлена неправильно. Скорее всего таким образом антиспам блокирует стороннее ПО. Необходимо отключить антивирусы, попробовать запустить программу от имени администратора и заново перепрошить.
Скорее всего таким образом антиспам блокирует стороннее ПО. Необходимо отключить антивирусы, попробовать запустить программу от имени администратора и заново перепрошить.
После обновления SilverStone F1 Z77PRO перестал включаться
Возможно у вас установлена ОС Windows 10. К сожалению, на данной ОС обновление невозможно. Попробуйте найти более раннюю ОС Windows, отключить антивирусы и перепрошить заново.
Почему нет прошивок / обновления ПО на радар-детекторы SilverStone F1 Z55PRO и SilverStone F1 Z77PRO?
Последние прошивки на данные устройства датированы мартом 2015 года, их можно найти в разделе «Обновления», вкладка «Архив». Аппараты сняли с производства и больше их ПО обновляться не будет. Если устройство работает корректно, устанавливать прошивку не нужно, можно просто обновить базу камер.
Как обновить базу камер для радар-детектора SilverStone F1 Z77PRO?
1. Убедитесь, что у вас установлена операционная система младше Windows 10. На Windows 10 радар-детектор скорее всего не обновится.
На Windows 10 радар-детектор скорее всего не обновится.
2. Отключите все возможные антивирусы (в том числе брендмауэр и файрволл), они блокируют программу и ПО установится некорректно.
3. Зайдите на сайт в раздел «Обновления» Выберите внизу страницы своё устройство. Скачиваете Стандартную версию.
4. Скачайте архив с базой камер на компьютер. Распакуйте архив (!) — правой кнопкой мыши щёлкните на иконке архива, в выпадающем меню выберите Extract here / Извлечь в.
5. Подключите радар-детектор к USB-разъему.
6. Запустите программу базы камер, которая автоматически загрузит обновленную таблицу gps-точек на ваш радар-детектор.
Во время обновления радар-детектор не подаёт сигналов. Если пишет Error или что-то похожее — значит, вы не отключили антивирусы. Отключите и попробуйте ещё раз.
Хочу обновить прошивку и базы на F1Z77. Прибор не виден через usb-устройство, пишет «неправильно установлены драйвера»…Как выбрать нужный драйвер? Win-32 или Win-64?
Драйвера устанавливаются на ваш компьютер для того, чтобы он автоматически определял ваш радар-детектор. Скачайте и запустите нужный – для 32- или 64-битной системы — драйвер (один раз) на ваш компьютер.
Скачайте и запустите нужный – для 32- или 64-битной системы — драйвер (один раз) на ваш компьютер.
Если вы не знаете, какая у вас система (32-х разрядная или 64-х), это легко проверить:
Windows XP: нажмите кнопку Пуск, правой кнопкой мыши щелкните на «Мой компьютер» и выберите пункт «Свойства». Если ваша система 64-разрядная, там это будет указано; если в появившемся окне отсутствует соответствующая надпись, компьютер работает под управлением 32-разрядной версии Windows XP.
Windows Vista, Windows 7: нажмите кнопку «Пуск», щелкните правой кнопкой мыши на «Компьютер» и выберите пункт «Свойства». В разделе «Система» можно просмотреть тип системы.
После подключения SilverStone F1 Z77PRO к компьютеру прибор не виден через usb-устройство, пишет «неправильно установлены драйвера».
1) Убедитесь что вы установили драйвера для нужной вас ОС.
2) После установки двайверов надо подключить устройство через usb-кабель и включить программу обновления (это другой файл).
3) Если программа не запускается — либо отключите антивирусы, брендмауэр, файрвол — они могут блокировать запуск программы, либо запустите её от имени администратора
Всего 0 вопроса
Оставлять вопросы могут только
зарегистрированные пользователи
| Диапазоны работы | K Ka X | K Ka X | K Ka Ku X | K Ka Ku X | K Ka Ku X | K Ka X | Длина волны лазера | 800 – 1100 нм | 800 – 1100 нм | 800 – 1100 нм | 800 — 1100 нм | 800 — 1100 нм | 800 – 1100 нм | Поддержка импульсных сигналов | Instant-On POP Ultra-K (K-Pulse) Ultra-X | POP
| POP Ultra-K (K-Pulse)
| POP Ultra-K (K-Pulse)
| POP Ultra-K (K-Pulse)
| Ultra-K (K-Pulse) | Определение радаров | Автоураган Стрелка Робот Автодория ЛИСД Кречет Крис Арена Визир
| Стрелка Робот Автодория ЛИСД Кречет Крис Арена Визир
| Автоураган Стрелка Робот Автодория ЛИСД Кречет Крис Арена Визир Кордон, АМАТА | Стрелка Робот Автодория ЛИСД Крис
| Стрелка Робот Автодория ЛИСД Крис
| Автоураган Стрелка Робот Автодория ЛИСД Кречет Крис Арена Визир
| Функции | фильтр ложных срабатываний | фильтр ложных срабатываний режим Трасса регулировка яркости дисплея
| защита от VG-2 фильтр ложных срабатываний | защита от VG-2 фильтр ложных срабатываний регулировка яркости дисплея | защита от VG-2 фильтр ложных срабатываний режим Авто регулировка яркости дисплея | защита от VG-2 защита от Spectre фильтр ложных срабатываний сигнатурное распознавание режим Авто режим Трасса режим Город установка лимита скорости регулировка яркости дисплея отключение звука голосовое оповещение
| Тип приемника | супергетеродин | супергетеродин | супергетеродин | супергетеродин | супергетеродин | Обработка сигнала | цифровая | цифровая | цифровая | цифровая | цифровая | Потребляемый ток | 410 мА | 225 мА | 225 мА | 225 мА | 200 мА |
Radar Range — обзор
5.
 1 Введение
1 ВведениеВ настоящее время радары ближнего действия становятся интересными устройствами для внутреннего и наружного применения [1–6]. Бесконтактная локализация с распознаванием человека может быть достигнута с помощью этих радарных датчиков, которые должны быть компактными и иметь хорошие характеристики [7–10]. Приложения варьируются от ухода за престарелыми, наблюдения за пациентами, обнаружения выживших после схода лавин или землетрясений и здравоохранения в реальном времени до дополненной реальности на основе радаров [11–16].
С этой целью в литературе традиционно предлагались две основные архитектуры: доплеровские радары и импульсные радиолокационные сверхширокополосные (ИК-СШП) радиолокационные системы. Первые используют одиночный тон в качестве формы сигнала передачи, не имея разрешения по дальности [11,17,18]. Последние передают чрезвычайно узкие импульсы, которые обычно трудно уловить [12,19–22]. В обоих случаях было предложено множество схем и связанных подходов к обработке с интересными и многообещающими результатами в области биочувствительности и здравоохранения [17–22].
Эта глава посвящена недавно предложенной архитектуре радара непрерывного излучения с линейной частотной модуляцией (LFMCW) для приложений локализации с учетом человеческого фактора [7,23–26]. Добавляя также функцию когерентности, система сочетает в себе превосходную фазовую точность при измерении дальности до целей с разрешением по дальности [23–26]. Кроме того, получение эхо-сигналов, отраженных от целей, можно значительно упростить, что может быть использовано для разработки недорогих прототипов радаров [23–26].
Глава написана в автономном стиле, так что читатель может найти всю важную информацию для понимания, создания, использования и даже моделирования согласованного прототипа радара LFMCW для приложений ближнего действия. Учитывая его уникальные особенности, авторы считают, что в ближайшем будущем подобная радарная система будет широко распространяться для улучшения качества нашей жизни. Возможно, автомобильный сектор сейчас лидирует в этой гонке [27–29].
В следующем разделе описывается так называемый метод уменьшения амплитуды, который является ключевой концепцией недорогого радара LFMCW. Он заключается в смешивании реплики переданного сигнала с эхом, исходящим от целей.
Он заключается в смешивании реплики переданного сигнала с эхом, исходящим от целей.
Простой математический анализ для понимания форм сигналов представлен в Разделе 5.3, который знакомит читателя с важными понятиями, такими как быстрое время, медленное время, разрешение по диапазону и т. Д. В разделе 5.3 также подробно описаны ключевые аспекты, связанные с поддержанием когерентности радара, чтобы можно было использовать фазовую / доплеровскую историю рассеивателей цели. Кроме того, вводятся два простых алгоритма для получения эволюции дальности целей.В зависимости от амплитуды и фазы сигнала с замедленным временем эти алгоритмы могут использоваться для получения истории дальности до целей, что является основным выходом, требуемым в приложениях локализации с учетом человеческого фактора.
Вопросы обработки сигналов представлены в разделе 5.4, с введением обычного форматирования данных и построением важных матриц, таких как матрица профиля дальности или карта доплеровского диапазона. Кроме того, в Разделе 5 представлено более формальное описание алгоритмов отслеживания истории дальности до целей.4.
Кроме того, в Разделе 5 представлено более формальное описание алгоритмов отслеживания истории дальности до целей.4.
Раздел 5.5 рассматривает важные концепции разрешения по дальности, точности и точности в контексте когерентных радаров LFMCW. Авторы отмечают, что иногда эти концепции недостаточно используются в литературе, что обычно приводит читателя в замешательство. Также кратко описаны концепции для других размеров, таких как угол (азимут или возвышение) и доплеровский.
С другой стороны, беспорядок — это любой нежелательный возврат, который может отрицательно повлиять на правильную работу радара.В контексте локализации с учетом информации о человеке в разделе 5.6 представлена математическая основа для возможных возникающих эффектов препятствий и предложены методы уменьшения помех на основе допплера для когерентных радаров LFMCW.
Результаты моделирования и эксперимента приведены в разделах 5.7 и 5.8 соответственно. Моделируемые примеры позволяют подтвердить принцип работы радиолокационной системы, подразумеваемую математику, указанные ограничения и предлагаемые алгоритмы. Экспериментальные результаты также подтверждают концепции и устанавливают связь с реальностью.Дополнительно дается краткое описание сконструированного прототипа.
Экспериментальные результаты также подтверждают концепции и устанавливают связь с реальностью.Дополнительно дается краткое описание сконструированного прототипа.
В последнем разделе (Раздел 5.9) вкратце описывается наша будущая работа, которая в основном сосредоточена на создании прототипа когерентного LFMCW диапазона миллиметровых волн. Преимущества увеличения рабочей частоты радиолокационного датчика комментируются в разделе 5.9.
радар | Определение, изобретение, история, типы, применения, погода и факты
Радар , электромагнитный датчик, используемый для обнаружения, определения местоположения, отслеживания и распознавания различных объектов на значительных расстояниях.Он работает, передавая электромагнитную энергию на объекты, обычно называемые целями, и наблюдая за отраженным от них эхом. Целями могут быть самолеты, корабли, космические корабли, автомобили и астрономические тела, или даже птицы, насекомые и дождь. Помимо определения присутствия, местоположения и скорости таких объектов, радар иногда может также определять их размер и форму. Что отличает радар от оптических и инфракрасных датчиков, так это его способность обнаруживать далекие объекты в неблагоприятных погодных условиях и определять их дальность или расстояние с точностью.
Что отличает радар от оптических и инфракрасных датчиков, так это его способность обнаруживать далекие объекты в неблагоприятных погодных условиях и определять их дальность или расстояние с точностью.
Радар является «активным» сенсорным устройством, поскольку он имеет собственный источник освещения (передатчик) для определения местоположения целей. Обычно он работает в микроволновом диапазоне электромагнитного спектра, измеряемом в герцах (циклах в секунду), на частотах от 400 мегагерц (МГц) до 40 гигагерц (ГГц). Однако он использовался на более низких частотах для приложений дальнего действия (частоты до нескольких мегагерц, которые являются HF [высокочастотным] или коротковолновым диапазоном), а также на оптических и инфракрасных частотах (частоты лазерного радара, или лидар).Компоненты схем и другое оборудование радарных систем различаются в зависимости от используемой частоты, а размеры систем варьируются от достаточно малых, чтобы поместиться на ладони, до таких огромных, что они могли бы заполнить несколько футбольных полей.
Радар быстро развивался в течение 1930-40-х годов для удовлетворения потребностей военных. Он по-прежнему широко используется в вооруженных силах, где зародились многие технологические достижения. В то же время радары находят все большее количество важных гражданских применений, в частности, управление воздушным движением, наблюдение за погодой, дистанционное зондирование окружающей среды, навигацию самолетов и судов, измерение скорости для промышленных приложений и для правоохранительных органов, космического наблюдения и планетарного наблюдения. наблюдение.
Основы радара
Радар обычно включает излучение узкого луча электромагнитной энергии в космос от антенны ( см. Рисунок ). Узкий луч антенны сканирует область, где ожидаются цели. Когда цель освещается лучом, он улавливает часть излучаемой энергии и отражает часть обратно к радарной системе. Поскольку большинство радарных систем не передают и не принимают одновременно, одна антенна часто используется с разделением по времени как для передачи, так и для приема.
Переданный импульс уже прошел цель, которая отразила часть излучаемой энергии обратно в сторону РЛС.
Encyclopædia Britannica, Inc. Оформите подписку Britannica Premium и получите доступ к эксклюзивному контенту. Подпишись сейчас Приемник, прикрепленный к выходному элементу антенны, извлекает полезные отраженные сигналы и (в идеале) отклоняет те, которые не представляют интереса. Например, интересующий сигнал может быть эхом от самолета.Сигналы, которые не представляют интереса, могут быть эхом от земли или дождя, которые могут маскировать и мешать обнаружению желаемого эха от самолета. Радар измеряет местоположение цели по дальности и угловому направлению. Дальность или расстояние определяется путем измерения общего времени, которое требуется радиолокационному сигналу, чтобы пройти туда и обратно к цели и обратно ( см. Ниже ). Угловое направление цели определяется по направлению, в котором направлена антенна во время приема эхо-сигнала. Посредством измерения местоположения цели в последовательные моменты времени можно определить недавний путь цели. Как только эта информация будет установлена, можно предсказать будущий путь цели. Во многих приложениях обзорных радаров цель не считается «обнаруженной» до тех пор, пока не будет установлена ее траектория.
Посредством измерения местоположения цели в последовательные моменты времени можно определить недавний путь цели. Как только эта информация будет установлена, можно предсказать будущий путь цели. Во многих приложениях обзорных радаров цель не считается «обнаруженной» до тех пор, пока не будет установлена ее траектория.
Радарные системы
Радарные системы Введение в Военно-морская техникаБазовые радиолокационные системы
Принцип действия
Радар — это аббревиатура
для радиообнаружения и определения дальности.Термин «радио»
относится к использованию электромагнитных волн с длинами волн в
так называемая радиоволновая часть спектра
, которая охватывает широкий диапазон от 10 4 км до 1 см. В радарных системах
обычно используются длины волн порядка 10 см, что соответствует
до частот
порядка 3 ГГц. Обнаружение и ранжирование части аббревиатуры
выполняется посредством
отсчета времени задержки между передачей импульса радиоэнергии
и его последующее возвращение
. Если время задержки Dt,
тогда диапазон можно определить по простой формуле
Если время задержки Dt,
тогда диапазон можно определить по простой формуле
:
R = cDt / 2
, где c = 3 x 10 8 м / с, скорость света при которой
все электромагнитные волны распространяются.
Коэффициент двойки в формуле исходит из наблюдения, что
Радиолокационный импульс должен пройти
до цели и обратно до обнаружения, или в два раза больше дальности.
Последовательность импульсов радара
разновидность амплитудной модуляции частоты радара
несущая волна, подобно тому, как несущие волны модулируются при коммуникации
системы.
В данном случае информационный сигнал довольно простой:
одиночный импульс, повторяющийся с регулярными интервалами
. Общая модуляция несущей радара,
известная как последовательность импульсов
, показана ниже. Общие параметры радара, как определено
см. рисунок 1.
Фигура 2.
PW = ширина импульса. PW имеет единицы времени и обычно выражается
в мс. PW — продолжительность
пульса. RT = время отдыха. RT — интервал между импульсами.
Измеряется в мсек.PRT = импульс
время повторения. PRT имеет единицы времени и обычно выражается
в мс. PRT — это интервал между началом одного импульса
и начало другого. PRT также равен сумме, PRT =
PW + RT. PRF = частота повторения импульсов. PRF имеет единицы времени -1 и обычно выражается в Гц (1 Гц = 1 / с) или в импульсах на
второй (ппс). PRF — это количество импульсов, передаваемых в секунду.
и равен обратному PRT. RF = радиочастота. РФ имеет
единиц времени -1 или Гц и обычно выражается в
ГГц или МГц.RF — частота несущей волны, которая
модулированы для формирования последовательности импульсов.
RT = время отдыха. RT — интервал между импульсами.
Измеряется в мсек.PRT = импульс
время повторения. PRT имеет единицы времени и обычно выражается
в мс. PRT — это интервал между началом одного импульса
и начало другого. PRT также равен сумме, PRT =
PW + RT. PRF = частота повторения импульсов. PRF имеет единицы времени -1 и обычно выражается в Гц (1 Гц = 1 / с) или в импульсах на
второй (ппс). PRF — это количество импульсов, передаваемых в секунду.
и равен обратному PRT. RF = радиочастота. РФ имеет
единиц времени -1 или Гц и обычно выражается в
ГГц или МГц.RF — частота несущей волны, которая
модулированы для формирования последовательности импульсов.
Механизация
Практическая радиолокационная система требует семи основных компонентов, как показано на рисунке.
ниже:
Рисунок 3
Преобразователь . Передатчик создает радиоволны для
быть отправленным и модулирует его, чтобы сформировать последовательность импульсов. Передатчик
также должен усилить сигнал до высокого уровня мощности, чтобы обеспечить
адекватный диапазон. Источником несущей волны может быть
клистрона, лампы бегущей волны (ЛБВ) или магнетрона.Каждый
имеет свои особенности и ограничения.
Источником несущей волны может быть
клистрона, лампы бегущей волны (ЛБВ) или магнетрона.Каждый
имеет свои особенности и ограничения.
2. Приемник . Приемник чувствителен к диапазон передаваемых частот и обеспечивает усиление возвращенного сигнала. Чтобы обеспечить максимальную диапазон, приемник должен быть очень чувствительным, не вводя чрезмерного шум. Возможность отличить полученный сигнал от фона шум зависит от отношения сигнал / шум (S / N).
Фоновый шум задается средним значением, называемым шумовой эквивалентной мощностью (НЭП).Это напрямую приравнивает шум к обнаруженному уровню мощности. так что его можно сравнить с возвратом. Используя эти определения, критерий успешного обнаружения цели
П r > (S / N) НЭП,
где P r — мощность обратного сигнала. Поскольку это
является важной величиной для определения характеристик радиолокационной системы,
ему присвоено уникальное обозначение, S min , и он называется Минимальный сигнал для обнаружения .
S мин = (S / N) NEP
Поскольку S min , выраженное в ваттах, обычно является малым число, оказалось полезным определить эквивалент в децибелах, MDS, что означает Минимальный различимый сигнал .
MDS = 10 Log (S мин /1 мВт)
При использовании децибел количество в скобках логарифма должно быть числом без единиц. Я определение МДС, это число составляет фракцию S мин /1 мВт. Напоминаем, что мы используем специальное обозначение дБм для единиц измерения MDS, где «m» означает 1 мВт. Это сокращение для децибел относительно 1 мВт, что иногда записывается как дБ // 1 мВт.
В ресивере, С / Н
устанавливает порог обнаружения, который определяет, что будет
отображаться а что не будет.Теоретически, если S / N = 1, то
только возвращается с мощностью, равной или большей, чем фон
будет отображаться шум. Однако шум является статистическим
процесс и изменяется случайным образом. НЭП просто средний
значение шума. Бывают моменты, когда шум превышает
порог, устанавливаемый приемником. Поскольку это
будет отображаться и отображаться как законная цель, это называется ложной тревогой . Если SNR установлен слишком высоким, то
будет несколько ложных срабатываний, но некоторые фактические цели могут не
будет отображаться как промах).Если SNR установлен слишком низко,
тогда будет много ложных срабатываний или высокий уровень ложных срабатываний
скорость (FAR).
Бывают моменты, когда шум превышает
порог, устанавливаемый приемником. Поскольку это
будет отображаться и отображаться как законная цель, это называется ложной тревогой . Если SNR установлен слишком высоким, то
будет несколько ложных срабатываний, но некоторые фактические цели могут не
будет отображаться как промах).Если SNR установлен слишком низко,
тогда будет много ложных срабатываний или высокий уровень ложных срабатываний
скорость (FAR).
Некоторые приемники контролируют
фон и постоянно корректировать SNR для поддержания
постоянная частота ложных срабатываний, поэтому все они называются приемниками CFAR.
Какой-то общий приемник функции:
1.) Импульсная интеграция. Приемник принимает средняя обратная сила по многим импульсам. Случайные события подобный шум не будет появляться в каждом импульсе и, следовательно, при усреднении будет иметь меньший эффект по сравнению с фактическими целями, которые будет в каждом пульсе.
2.) Контроль времени чувствительности (STC). Эта функция
снижает влияние возвратов из состояния моря. Это уменьшает
минимальный SNR приемника на короткое время сразу
после передачи каждого импульса. Эффект от настройки STC
состоит в том, чтобы уменьшить беспорядок на дисплее в регионе непосредственно
вокруг передатчика. Чем больше значение STC,
тем больше расстояние от передатчика, в котором помехи
будет удален. Однако чрезмерное значение STC отключится.
потенциал возвращается близко к передатчику.
Эта функция
снижает влияние возвратов из состояния моря. Это уменьшает
минимальный SNR приемника на короткое время сразу
после передачи каждого импульса. Эффект от настройки STC
состоит в том, чтобы уменьшить беспорядок на дисплее в регионе непосредственно
вокруг передатчика. Чем больше значение STC,
тем больше расстояние от передатчика, в котором помехи
будет удален. Однако чрезмерное значение STC отключится.
потенциал возвращается близко к передатчику.
3.) Быстрая постоянная времени (FTC). Эта функция разработана
для уменьшения эффекта длительной отдачи от
дождь. Эта обработка требует, чтобы сила отдачи
сигнал должен быстро меняться с течением времени. С дождя
происходит на и расширенной области, он будет производить долгий, устойчивый
возвращаться. Обработка FTC
отфильтрует эти возвраты с дисплея. Только импульсы, которые
будут отображаться быстро подниматься и опускаться. В технической
В терминах FTC — это дифференциатор , то есть он определяет
скорость изменения сигнала, который затем используется для различения импульсов
которые не меняются быстро.
3. Источник питания . Блок питания обеспечивает
электрическая мощность для всех компонентов. Самый большой
Потребитель энергии — передатчик, которому может потребоваться несколько
кВт средней мощности. Фактическая мощность, передаваемая в
импульс может быть намного больше 1 кВт. Блок питания
только должен быть в состоянии обеспечить среднее количество энергии
потребляется, а не на высоком уровне мощности во время фактической передачи импульса
. Энергия может храниться в конденсаторе
банк, например, во время отдыха.Сохраненный
энергия затем может быть помещена в импульс при передаче, увеличивая
пиковая мощность. Пиковая мощность и средняя мощность равны
связаны величиной, называемой рабочим циклом, DC. Рабочий цикл
— доля каждого цикла передачи, которую радар
действительно передает. Что касается последовательности импульсов
на рисунке 2 рабочий цикл может быть следующим:
DC = PW / PRF
Синхронизатор .
Синхронизатор координирует время для определения диапазона.
Он регулирует частоту отправки импульсов (т.е.е. устанавливает PRF)
и сбрасывает синхронизирующие часы
для определения диапазона для каждого импульса. Сигналы от
синхронизатор отправлены
одновременно с передатчиком, который посылает новый импульс,
и на дисплей
, который сбрасывает обратную развертку.
Дуплексер . Это переключатель, который попеременно подключает
передатчик или приемник к антенне. Его цель — защитить
приемник от выхода высокой мощности передатчика. В течение
передача исходящего импульса, дуплексер будет выровнен
к передатчику на длительность импульса, ПВт.После
был отправлен, дуплексер настроит антенну на
приемник. Когда будет отправлен следующий импульс, дуплексер сместится
обратно к передатчику. Дуплексер не требуется, если передаваемый
мощность низкая.
Антенна . Антенна принимает радарный импульс от передатчика.
и поднимает его в воздух. Кроме того, антенна должна фокусироваться
энергия в четко определенный луч, который увеличивает мощность
и позволяет определять направление цели. В
антенна должна отслеживать свою ориентацию, что может быть выполнено
синхронизатором. Также существуют антенные системы, которые
не двигаются физически, а управляются электроникой (в этих
случаях ориентация луча радара уже известна a
априори ).
В
антенна должна отслеживать свою ориентацию, что может быть выполнено
синхронизатором. Также существуют антенные системы, которые
не двигаются физически, а управляются электроникой (в этих
случаях ориентация луча радара уже известна a
априори ).
Ширина луча
антенны — это мера угловой протяженности
самая мощная порция излучаемой энергии. За
В наших целях основная часть,
, называемая главным лепестком, будет находиться под всеми углами от перпендикуляра.
где мощность
составляет не менее 1/2 пиковой мощности или, в децибелах, -3
дБ.Ширина луча равна
диапазону углов в главном лепестке, определенном таким образом. Обычно
он преобразуется в
, представляющую интерес плоскость, такую как горизонтальная или вертикальная плоскость.
Антенна
будет иметь отдельную ширину луча по горизонтали и вертикали. За
радиолокационная антенна, ширина луча
может быть спрогнозирована по размеру антенны
в самолете
процентов по
д = л / л
где:
q — ширина луча в радианах,
l — длина волны
радар, а
L — размер антенны, в
направление интереса (т. е. ширина или высота).
е. ширина или высота).
В обсуждении
антенн связи, было заявлено, что ширина луча
для антенны может быть найдена с помощью q
= 2л / л. Так кажется
что антенны радара
имеют половину ширины луча в качестве средств связи
антенны. Отличие
в том, что антенны радара используются как для передачи, так и для приема
сигнал. Эффекты интерференции
от каждого направления объединяются, что имеет
эффект уменьшения
ширины луча. Поэтому при описании двусторонних систем
(как и радар)
целесообразно уменьшить ширину луча в ½ дюйма
формула аппроксимации ширины пучка
.
направленный усиление антенны — это мера того, насколько хорошо луч
сфокусирован во всех углах. Если бы мы были ограничены одним
плоскости, направленное усиление
будет просто отношением 2p / q.
Поскольку та же мощность распределяется в меньшем диапазоне углов
, направленное усиление представляет собой
величина, на которую увеличивается мощность
в пучке. В обоих углах, затем по направлению
прирост будет равен:
В обоих углах, затем по направлению
прирост будет равен:
G dir = 4p / q f
поскольку есть 4p стерадианы, соответствующие
во всех направлениях (телесный угол, измеренный
в стерадианах, определяется как площадь фронта луча
делится на диапазон
в квадрате, следовательно, ненаправленный луч будет покрывать область
из 4пр 2 на расстоянии R
, следовательно, 4p стерадиана).
Здесь мы использовали:
q = ширина луча по горизонтали
(радианы)
f = ширина луча по вертикали (радианы)
Иногда направленное усиление измеряется в децибелах, а именно 10
журнал (G dir ).
В качестве примера антенна с горизонтальной шириной луча
1,5 0 (0,025 радиана) и
вертикальная ширина луча 20 o (0,33 радиана)
будет иметь:
направленное усиление (дБ) = 10 log (4 p / 0,025 0,333) = 30,9 дБ
Пример: найти ширину луча по горизонтали и вертикали
радиолокационная система большой дальности
AN / SPS-49 и коэффициент направленного действия в дБ. Антенна
имеет ширину 7,3 м,
Антенна
имеет ширину 7,3 м,
, высоту 4,3 м и работает на частоте 900 МГц.
Длина волны, l = c / f = 0,33 м.
Учитывая, что L = 7,3 м, тогда
q = l / L
= 0,33 / 7,3 = 0,045 радиан, или
q = 3 0 .
Высота антенны 4,3 м, поэтому аналогичная
расчет дает
f = 0,076 радиан
f = 4 0 .
Коэффициент направленности,
G dir = 4p / (0,045
0,076) = 3638.
Выражается в децибелах,
направленное усиление = 10 Log (3638)
= 35.6 дБ.
Дисплей . Блок отображения может иметь различные формы, но в целом предназначена для представления полученной информации оператор. Самый простой тип отображения называется А-сканирование (амплитуда vs. задержка по времени). Вертикальная ось — сила отдачи. а по горизонтальной оси отложено время задержки или диапазон. А-скан не предоставляет информации о направлении цели.
Рисунок 4
Наиболее распространенным отображением является PPI (индикатор положения плана). Информация A-скана преобразуется в яркость и затем отображается
в том же относительном направлении, что и антенна. В
результат — это вид сверху вниз на ситуацию, когда диапазон является
расстояние от начала координат. PPI, пожалуй, самый естественный
дисплей для оператора и поэтому наиболее широко используемый. В
В обоих случаях синхронизатор сбрасывает кривую для каждого импульса, поэтому
что диапазон
Информация A-скана преобразуется в яркость и затем отображается
в том же относительном направлении, что и антенна. В
результат — это вид сверху вниз на ситуацию, когда диапазон является
расстояние от начала координат. PPI, пожалуй, самый естественный
дисплей для оператора и поэтому наиболее широко используемый. В
В обоих случаях синхронизатор сбрасывает кривую для каждого импульса, поэтому
что диапазон
информация начнется в источнике.
Рисунок 5
В этом примере использование увеличенного STC для подавления моря беспорядок был бы полезен.
Характеристики радара
Все
параметров базовой импульсной радиолокационной системы повлияет
производительность
каким-то образом. Здесь мы находим конкретные примеры
и количественно оценить эту зависимость
, где это возможно.
Ширина импульса
Длительность импульса и длина цели по
радиальное направление
определяет длительность возвращенного импульса. В
в большинстве случаев длина возврата
обычно очень похожа на передаваемый импульс. в
На дисплее, импульс
в
На дисплее, импульс
(по времени) будет преобразован в импульс по расстоянию.
Диапазон значений
от передней кромки до задней кромки создаст некоторую неопределенность.
в диапазоне
к цели. Если принять за чистую монету, способность
Диапазон точного измерения
определяется шириной импульса.
Если обозначить
погрешность в измеряемом диапазоне как разрешение диапазона,
R RES , то оно должно быть равно эквиваленту диапазона
ширины импульса, а именно:
R RES = c PW / 2
Теперь вы можете задаться вопросом, почему бы просто не взять передний край
импульс как диапазон
, который можно определить с гораздо более высокой точностью?
Проблема в том, что
практически невозможно создать идеальную переднюю кромку.
На практике идеальный импульс
действительно будет выглядеть так:
Рисунок 6
Для создания идеально сформированного импульса с вертикальным передним фронтом
потребуется бесконечная пропускная способность. Фактически вы можете приравнять
полоса пропускания передатчика b
до минимальной длительности импульса, PW на:
Фактически вы можете приравнять
полоса пропускания передатчика b
до минимальной длительности импульса, PW на:
PW = 1 / 2b
Учитывая это понимание, вполне разумно сказать, что диапазон может быть определен не более точно, чем cPW / 2 или эквивалентно
R RES = c / 4b
Фактически, радар высокого разрешения часто называют широкополосным. радар, который вы теперь видите как эквивалентные утверждения.Один термин относится к временной области, а другой — к частотной области. Продолжительность импульса также влияет на минимальный диапазон, на котором радар может обнаружить. Исходящий импульс должен физически очистите антенну перед обработкой возврата. Поскольку это длится в течение промежутка времени, равного ширине импульса PW, минимальной тогда отображаемый диапазон:
R МИН = c PW / 2
Эффект минимального диапазона можно увидеть на дисплее PPI как насыщенный
или пустая область
вокруг исходной точки.
Рисунок 7
Увеличение ширины импульса при сохранении остальных параметров
то же самое повлияет на рабочий цикл и, следовательно, на средний
мощность. Для многих систем желательно сохранить среднюю мощность
фиксированный. Тогда PRF необходимо изменить одновременно с PW в
чтобы сохранить PW x PRF продукта одинаковым. Например, если
ширина импульса уменьшается в ½ раза, чтобы улучшить
разрешение, то PRF обычно увеличивается вдвое.
Для многих систем желательно сохранить среднюю мощность
фиксированный. Тогда PRF необходимо изменить одновременно с PW в
чтобы сохранить PW x PRF продукта одинаковым. Например, если
ширина импульса уменьшается в ½ раза, чтобы улучшить
разрешение, то PRF обычно увеличивается вдвое.
Частота повторения импульсов (PRF)
Частота пульса
передача влияет на максимальный диапазон, который может отображаться
.Напомним, что синхронизатор сбрасывает отсчет времени.
тактовый сигнал при передаче каждого нового импульса
. Возвращения с далеких целей, которые не
дойти до приемника до тех пор, пока
после того, как будет отправлен следующий импульс, не будет отображаться правильно.
Поскольку таймер
clock был сброшен, они будут отображаться, как если бы диапазон, в котором
меньше фактического.
Если бы это было возможно, то учитывалась бы информация о диапазоне
двусмысленный.
Оператор не будет знать, соответствует ли диапазон фактическому диапазону
или какое-то большее значение
.
Рисунок 8
Максимальный фактический диапазон, который может быть обнаружен и отображен без неоднозначность, или максимальный однозначный диапазон , это просто диапазон, соответствующий интервалу времени, равному повторению импульсов время, PRT. Таким образом, максимальный однозначный диапазон
R UNAMB = c PRT / 2 = c / (2PRF)
Когда радар сканирует,
необходимо контролировать скорость сканирования так, чтобы в каждом конкретном случае было передано
достаточное количество импульсов.
направление в заказе
, чтобы гарантировать надежное обнаружение.Если используется слишком мало импульсов,
тогда будет еще
сложно отличить ложные цели от реальных.
Ложные цели могут присутствовать
в одном или двух импульсах, но не в десяти или двадцати подряд.
Поэтому для
поддерживать низкий уровень ложного обнаружения, количество переданных импульсов
в каждом направлении
должны быть высокими, обычно выше десяти.
Для систем с высоким
частота повторения импульсов (частоты), луч радара
может быть перемещен быстрее и, следовательно, быстрее сканировать.
И наоборот, если частота повторения импульсов
понижена, необходимо уменьшить скорость сканирования. Для простого
сканирует,
легко определить количество импульсов, которые будут возвращены от любого конкретного
цель. Пусть
t представляет время выдержки ,
это время, в течение которого цель остается в луче радара
во время каждого сканирования. Количество импульсов, N,
что цель будет подвергаться воздействию
во время задержки:
N = t PRF
Мы можем переписать это уравнение, чтобы наложить требование на задержку время для конкретного сканирования
t мин = N мин / PRF
Таким образом, легко увидеть, что высокая частота следования импульсов требует
меньшее время ожидания.Например, для непрерывного кругового сканирования
время пребывания связано со скоростью вращения и шириной луча.
т = q / Вт
где q = ширина луча [градусы] W = скорость вращения [градусы / сек] что даст время задержки в секундах. Эти отношения можно объединить, получив следующее уравнение, из которого максимальная скорость сканирования может быть определена для минимального количества импульсов за сканирование:
Вт МАКС = q PRF / N
Частота радара
Наконец, частота несущей радиоволны также будет иметь
некоторые
влияют на распространение луча радара.На низкой частоте
крайности, лучи радара
будут преломляться в атмосфере и могут попадать в «каналы»
что приводит к длинным диапазонам
. В крайнем случае луч радара будет вести себя
очень похоже на видимый свет и
движутся по очень прямым линиям. Очень высокая частота
лучи радара будут нести большие потери
и не подходят для систем большой дальности.
Частота будет
также влияют на ширину луча. Для антенны того же размера
: низкочастотный радар будет иметь большую ширину луча, чем высокочастотный. частота одна.
частота одна.
Чтобы сохранить постоянную ширину луча, низкочастотный радар
понадобится большая антенна
.
Теоретическое уравнение максимального диапазона
Приемник радара может обнаружить цель, если возврат достаточен.
сила.
Обозначим минимальный обратный сигнал, который может быть обнаружен
как S min , что должно иметь
единиц измерения Вт, Вт.
а способность цели отражать радиолокационную энергию
можно описать одним термином, s,
известен как РЛС поперечного сечения, который имеет единицы
м, 2 .Если абсолютно все происшествие
Энергия радара на цель была отражена
одинаково во всех направлениях, затем радар
поперечное сечение будет равно площади поперечного сечения цели
, видимой передатчиком. На практике,
некоторая энергия поглощается
, и отраженная энергия не распределяется равномерно во всех направлениях.
Следовательно, поперечное сечение радара
довольно сложно оценить и обычно
определяется путем измерения
.
С учетом этих новых количеств
мы можем построить простую модель мощности радара
, которая возвращается в приемник:
P r = P t G 1 / 4pR 2 с 1 / 4pR 2 A e
Члены в этом уравнении сгруппированы, чтобы проиллюстрировать последовательность от передачи до коллекции.Вот последовательность подробнее:
G = r G реж.
Передатчик выдает пиковую мощность P t в антенну,
который фокусирует его в луч с усилением G. Прирост мощности аналогичен
к усилению по направлению G dir , за исключением того, что он должен
также включают потери от передатчика к антенне. Эти
потери суммируются одним термином для эффективности r.
Следовательно,
Энергия радара распространяется равномерно во всех направлениях.В
поэтому мощность на единицу площади должна уменьшаться по мере увеличения площади.
Поскольку энергия распределена по поверхности сферы,
коэффициент 1 / 4pR 2 счетов
для уменьшения.
Энергия радара собирается поверхностью цели и
размышлял. Сечение радара s
учитывает оба этих процесса.
Отраженная энергия распространяется так же, как передаваемая энергия.
Приемная антенна собирает энергию, пропорциональную ее эффективная площадь, известная как апертура антенны, A e .Это также включает потери в процессе приема до тех пор, пока сигнал доходит до приемника. Следовательно, индекс «e» означает «эффективный». Эффективная апертура связана с физической апертурой A, тем же термином, что и коэффициент полезного действия, используемым для увеличения мощности, с учетом символа р. Так что
А е = г А
Наш критерий обнаружения прост: полученная мощность,
P r должен на
превышать минимум, S min . Поскольку полученные
мощность уменьшается с увеличением дальности, максимальная дальность обнаружения
возникает, когда принимаемая мощность равна
минимум, т.е.е.
P r = S мин . Если вы решите диапазон,
вы получите уравнение для максимальной теоретической дальности действия радара
Если вы решите диапазон,
вы получите уравнение для максимальной теоретической дальности действия радара
:
Возможно, наиболее важной особенностью этого уравнения является корень четвертой степени зависимость. Практическое значение этого состоит в том, что необходимо значительно увеличьте выходную мощность, чтобы получить умеренное увеличение спектакль. Например, чтобы увеличить дальность вдвое, передаваемый мощность пришлось бы увеличить в 16 раз. Вы также должны отметить что минимальный уровень мощности для обнаружения, S мин , зависит от по уровню шума.На практике это количество постоянно варьируется. для достижения идеального баланса между высокой чувствительностью который подвержен шуму и низкой чувствительности, что может ограничивать способность радара обнаруживать цели. Пример: найти максимум дальность действия РЛС AN / SPS-49 с учетом следующих данных
Размер антенны = 7,3 м в ширину на 4,3 м в высоту
КПД = 80%
Пиковая мощность = 360 кВт
Поперечное сечение = 1 м 2
S мин = 1 10 -12 Вт
Мы знаем из предыдущего Например, направленная антенна усиление,
G dir = 4p / qf
= 4p / (. 05 x 0,07) = 3430
05 x 0,07) = 3430
Коэффициент усиления,
G = r G dir
G = 2744.
Аналогичным образом, эффективная апертура
A e = rA
= 0,8 (7,3 x 4,3)
A e = 25,1 м 2 .
Следовательно, диапазон равен, или
R = 112 км.
Уравнение дальности действия радара Уравнение дальности действия радара ДомаСтруктура страницы
дальность действия радара
Существуют сотни версий уравнения дальности действия радара.Ниже приведена одна из наиболее основных форм системы с одной антенной (одна антенна для передачи и приема). Предполагается, что цель находится в центре луча антенны. Максимальная дальность обнаружения РЛС составляет;
Переменные в приведенном выше уравнении постоянны и зависят от радара, за исключением RCS цели. Мощность передачи будет порядка 1 мВт (0 дБмВт), а усиление антенны — около 100 (20 дБ) для эффективной излучаемой мощности (ERP) 100 мВт (20 дБмВт).Минимальный обнаруживаемый сигнал (P мин ) зависит от ширины полосы приемника (B), коэффициента шума (F), температуры (T) и требуемого отношения сигнал / шум (S / N). Приемник с узкой полосой пропускания будет более чувствительным, чем приемник с более широкой полосой пропускания. Коэффициент шума — это мера того, какой шум вносит устройство (приемник) в сигнал: чем меньше коэффициент шума, тем меньше шума вносит устройство. Повышение температуры влияет на чувствительность приемника за счет увеличения входного шума.
 Минимальные обнаруживаемые сигналы порядка пиковатт; RCS для автомобиля может быть порядка 100 квадратных метров.Точность уравнения дальности радара настолько хороша, насколько хороши исходные данные.
Минимальные обнаруживаемые сигналы порядка пиковатт; RCS для автомобиля может быть порядка 100 квадратных метров.Точность уравнения дальности радара настолько хороша, насколько хороши исходные данные.P мин. = Минимальный обнаруживаемый сигналТ = 290 ° К (62,33 ° F), В = 1 Гц
k = Константа Блотцмана = 1,38 x 10 -23 (Ватт * сек / ° Кельвина)
T = Температура (° Кельвина)
B = Полоса пропускания приемника (Гц)
F = Коэффициент шума (отношение), коэффициент шума (дБ)
(отношение сигнал / шум) мин.Доступная входная мощность теплового шума ( фоновый шум ) пропорциональна произведению kTB, где k — постоянная Больцмана, T — температура (градусы Кельвина), а B — ширина полосы шума приемника (приблизительно ширина полосы приемника) в герцах.
 = минимальное отношение сигнал / шум
= минимальное отношение сигнал / шумВышеприведенное уравнение дальности действия радара может быть записано для мощности как функции дальности для заданной мощности передачи, длины волны, усиления антенны и RCS.
| P rec = получаемая мощность P t = мощность передачи f o = частота передачи Lamda = длина волны передачи | G = усиление антенны сигма = поперечное сечение радара R = дальность c = скорость света |
Дальность действия радар-детектора
Радар имеет потерю дальности, обратно пропорциональную дальности в 4-й степени (1 / R 4 ).
 Потери дальности радиосвязи обратно пропорциональны квадрату дальности (односторонний путь — 1 / R 2 ). Мощность принимаемого сигнала (радар-детектором), где Gdet — усиление антенны детектора, может быть выражена, как показано ниже. Подставив минимальный сигнал детектора радаров на полученную мощность, можно оценить максимальную дальность действия детектора, если известны мощность радара и усиление антенны (ERP — эффективная излучаемая мощность).
Потери дальности радиосвязи обратно пропорциональны квадрату дальности (односторонний путь — 1 / R 2 ). Мощность принимаемого сигнала (радар-детектором), где Gdet — усиление антенны детектора, может быть выражена, как показано ниже. Подставив минимальный сигнал детектора радаров на полученную мощность, можно оценить максимальную дальность действия детектора, если известны мощность радара и усиление антенны (ERP — эффективная излучаемая мощность).| P det = мощность, получаемая детектором G det = усиление антенны детектора |
Потери радиолокационного распространения пропорциональны 1 / R 4 (двусторонний путь сигнала), в то время как радар-детектор будет улавливать сигнал на прямом (одностороннем) пути с потерями, пропорциональными 1 / R 2 ( hugh преимущество для детектора).Еще одно преимущество hugh заключается в том, что радар принимает отражение (RCS), большая часть отраженной энергии направлена на в сторону от радара, .
 Преимущество радара в том, что антенна намного больше (большее усиление) и более чувствительный (к сигналу радара) приемник. Однако хороший радар-детектор должен уметь обнаруживать радар до того, как радар обнаружит транспортное средство, но не всегда .
Преимущество радара в том, что антенна намного больше (большее усиление) и более чувствительный (к сигналу радара) приемник. Однако хороший радар-детектор должен уметь обнаруживать радар до того, как радар обнаружит транспортное средство, но не всегда .CopRadar.com
Уравнения дальности действия радара
Дом
Понимание концепций дальности и пеленга
РАДАР стал ключевой технологией, помогающей ориентироваться в самолетах.С растущим спросом на эффективное использование воздушного пространства растет и потребность в радиолокационных системах. РАДАР — это технология, использующая радиоволны для обнаружения объектов в воздухе или на море.
Дальность и пеленг — это одна из двух основных характеристик, которые измеряет РАДАР. Чтобы понять эти два параметра, нам нужно понять, как работает РАДАР.
Радар — это аббревиатура от «радиообнаружения и определения дальности». Радарная система обычно работает в ультравысокой (UHF) или микроволновой части радиочастотного (RF) спектра и используется для обнаружения положения и / или движения объектов.
Простыми словами «Дальность» — это расстояние до объекта от определенной точки. В радаре дальность определяется формулой. Но зачем вам формула для определения дальности с помощью РАДАРА?
Потому что технология RADAR использует радиоволны, которые движутся со скоростью света. Как уже упоминалось, дальность — это расстояние от цели до определенного объекта. Для измерения расстояния мы используем формулу Ньютона
S = v * t
Измерим расстояние до объекта, в данном случае — самолета.Расстояние до объекта от РАДАРА называется наклонной дальностью — это расстояние по линии прямой видимости.
Наклонная дальность — это расстояние прямой видимости между радаром и освещаемым объектом. Расстояние до земли — это расстояние по горизонтали между излучателем и его целью. Его расчет требует знания высоты цели.
Так как радиоволны распространяются со скоростью света, назовем эту скорость C o
Формула будет
В = с / т
С или = 2R / т
В то время как «2R» — это наблюдение за импульсом радара, идущим к цели, а затем возвращающимся к радару. «T» — это затраченное время.
«T» — это затраченное время.
Теперь V = C o для скорости света C = 3 · 10 8 м / с
Расстояние S = 2R.
T — затраченное время.
Формула, полученная для диапазона, следовательно: R = C o * t / 2
Формула дальности рассчитывается программным модулем RADAR.
В навигации «Пеленг» описывает горизонтальный угол между направлением одного объекта и другого объекта или между ним и истинным севером.Он измеряется в милах или градусах. Подшипник используется в гражданской авиации, войне, а также в поисково-спасательных операциях.
В технологии RADAR азимут — это определение направления. Истинный пеленг (относительно истинного севера) радиолокационной цели — это угол между истинным севером и линией, направленной непосредственно на цель. Этот угол измеряется в горизонтальной плоскости и по часовой стрелке от истинного севера.
Угол пеленга на радиолокационную цель также может быть измерен по часовой стрелке от центральной линии вашего собственного корабля или самолета. Это называется относительным подшипником.
Это называется относительным подшипником.
В воздушной навигации угол обычно измеряется от линии пути или курса воздушного судна по часовой стрелке.
Современные радиолокационные станции берут на себя эту задачу и с помощью спутников GPS самостоятельно определяют направление на север.
Радар | Лаборатория субмиллиметровых волн
Подробнее об ERADS (Expert Radar Signature Solutions)
Компактные радиолокационные диапазоны
В течение последних двадцати пяти лет компания STL разрабатывала и конструировала уникальные компактные радиолокационные диапазоны для создания радиолокационных сигнатур кораблей, танков и других тактических транспортных средств .Компактный радарный диапазон разработан для измерения масштабных моделей реальных целей с использованием лазерных и твердотельных субмиллиметровых лучей. Выполняя измерения радиолокационного рассеяния на высокоточных масштабных моделях внутри компактного радиолокационного диапазона, можно получить отпечаток или сигнатуру радара тактического транспортного средства с низкими затратами и очень высокой точностью.
Типичный компактный радарный уровнемер состоит из трех основных компонентов: безэховой камеры (для поглощения рассеянного рассеяния), системы позиционирования цели (для обеспечения точного позиционирования поставленной цели с точностью до 0.001 градус) и приемопередатчик субмиллиметрового диапазона (который передает субмиллиметровый луч и принимает сигнатуру обратного рассеяния от каждой цели).
STL, как часть консорциума средств радиолокационной сигнатуры Expert RADar Signature Solutions (ERADS), в настоящее время использует компактные диапазоны, предназначенные для соответствия полевым системам в VHF, UHF, X-диапазоне, K-диапазоне, Ka-диапазоне, Ku-диапазоне , и радар W-диапазона.
Персонал : Томас Гойетт, доктор философии, Гай ДеМартини, доктор философии, Джейсон Дикинсон, Кристофер Бодуан, доктор философии.D.
Исследования по сбору и анализу радиолокационных сигнатур
Использование компактных радиолокационных диапазонов в STL в составе радарного консорциума ERADS позволяет получать радиолокационные радиолокационные сигнатуры от тактических целей, начиная от кораблей и грузовиков до основных боевых танков. Самая популярная система измерения азимутальной развертки ISAR позволяет получать изображения обратного радиолокационного рассеяния, точно имитирующие оперативные измерения тактических целей на многочисленных платформах.
Самая популярная система измерения азимутальной развертки ISAR позволяет получать изображения обратного радиолокационного рассеяния, точно имитирующие оперативные измерения тактических целей на многочисленных платформах.
Радиолокационные сигнатуры, собранные в STL, представляют собой очень экономичный способ создания высококачественных изображений радиолокационного рассеяния из масштабных моделей.
За двадцатипятилетний опыт работы наши сотрудники приобрели значительный опыт в лабораторной интеграции современных методов сбора данных, управления движением, обработки и визуализации данных.
Персонал : Томас Гойетт, доктор философии, Гай ДеМартинис, доктор философии, Джейсон Дикинсон
Изготовление мелкомасштабных моделей
STL управляет центром моделирования целей мирового класса, где представлены фотографии тактических целей и модели САПР превращаются в масштабные модели с удивительно высокой точностью воспроизведения.Неослабевающее внимание к деталям позволяет изготавливать масштабные модели с масштабными сварными швами, головками болтов, звеньями гусеницы, гайками, ржавчиной, повреждениями в боях и неметаллическими элементами, такими как резиновые прокладки, стекловолокно и холст.
Персонал: Талал Чоуман
Характеристики диэлектриков для масштабирования радара
Для правильного масштабирования тактических целей, содержащих неметаллические компоненты, Лаборатория материалов STL разработала методы измерения комплексной диэлектрической проницаемости материалов на истинном радаре. частоты, а также частоты ТГц.Зная диэлектрическую проницаемость радиолокационной частоты материала, можно изготовить новый материал, обладающий такой же диэлектрической проницаемостью на частотах ТГц, используя обширную библиотеку рецептов диэлектрических материалов для подгонки материалов STL. Затем цех по изготовлению мелкомасштабных моделей STL может создавать компоненты модели с идеальным диэлектрическим масштабом, используя эти рецепты.
Персонал: Эндрю Гейтсман, Ph.D.
Исследования малозаметности
Из-за чрезвычайно высокой чувствительности систем приемопередатчиков в STL у нас есть возможность выполнять радиолокационные исследования обратного рассеяния малозаметных и незаметных целей. Прототипы транспортных средств или систем можно смоделировать и измерить, а затем модифицировать и повторно измерить в рамках процесса уменьшения поперечного сечения радара, повторяя окончательный малозаметный дизайн.
Прототипы транспортных средств или систем можно смоделировать и измерить, а затем модифицировать и повторно измерить в рамках процесса уменьшения поперечного сечения радара, повторяя окончательный малозаметный дизайн.
Персонал : Томас Гойетт, Ph.D.
Реалистичный рельеф местности и помехи
Наземные самолеты
Хорошо известно, что местная местность, на которой находится наземный транспорт, оказывает значительное влияние на поперечное сечение радара транспортного средства. STL спроектировала и изготовила более двух десятков наземных плоскостей, моделирующих поведение обратного рассеяния для самых разных типов местности, таких как пустыня, почва, асфальт, бетон и т. Д.Сравнение поведения поляриметрического обратного рассеяния наземных плоскостей, моделирующих как сухую, так и влажную почвенную местность, показывает отличное согласие с полевыми данными в диапазонах X, Ka и W.
Ground Clutter STL активно исследует методы точного моделирования сложных компонентов ландшафта, таких как неоднородные неровности, камни, деревья, растительность, корни, трава и т. Д. Методы изготовления для моделирования изменений плотности и влажности, которые могут привести к объемному рассеянию, адресуются.Были разработаны методы изготовления искусственных помех, таких как дороги и небольшие здания. Кроме того, можно спроектировать и включить в масштабные модели наземных самолетов загромождающие объекты, связанные с настоящими «эксплуатационными условиями», такие как ранцы, ящики для хранения боеприпасов, топливные контейнеры, поврежденные автомобили и защитные бермы.
Д. Методы изготовления для моделирования изменений плотности и влажности, которые могут привести к объемному рассеянию, адресуются.Были разработаны методы изготовления искусственных помех, таких как дороги и небольшие здания. Кроме того, можно спроектировать и включить в масштабные модели наземных самолетов загромождающие объекты, связанные с настоящими «эксплуатационными условиями», такие как ранцы, ящики для хранения боеприпасов, топливные контейнеры, поврежденные автомобили и защитные бермы.
Персонал: Эндрю Гейтсман, Ph.D.
Радиолокационные микродоплеровские сигнатуры дронов и птиц в диапазонах K и W
Микродоплеровские дроны
Для обновления в реальном времени во время сбора данных профили дальномерного допплера производятся путем обработки 128 последовательных звуковых сигналов, соответствующих окну длина 10.3 и 30 миллисекунд для 94 ГГц и 24 ГГц соответственно. Это очень полезно для обеспечения того, чтобы цель во время полета находилась в пределах луча радара.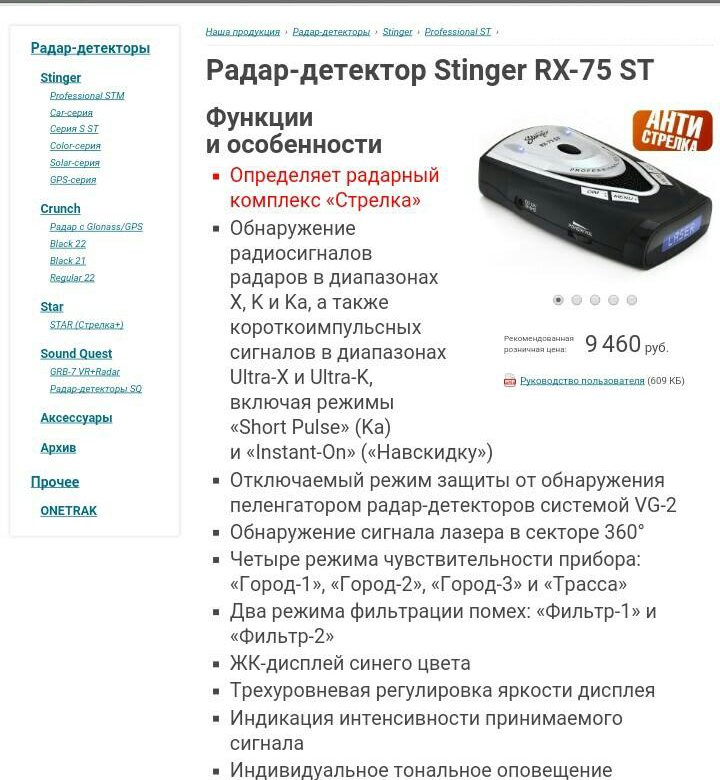 На рисунке 2 (A) показано, как дрон выглядит на профиле дальномерного доплеровского сдвига. Дрон демонстрирует четко видимый микродоплер с силой около -40 дБм, что на 40 дБ выше минимального уровня шума. Рисунок 2 (B) представляет собой график спектрограммы стандарта DJI Phantom 3 на частоте 94 ГГц, полученный с использованием окна STFT длиной 41,2 миллисекунды. Отрицательная скорость соответствует цели, приближающейся к радару, и наоборот, поэтому DJI Phantom на спектрограмме сначала уходил от радара, а затем менял направление на отметке 1.25 с. Спектрограмма получается только путем выбора интервалов диапазона, занятых дроном. Дрон находился на расстоянии около 120 м от радара.
На рисунке 2 (A) показано, как дрон выглядит на профиле дальномерного доплеровского сдвига. Дрон демонстрирует четко видимый микродоплер с силой около -40 дБм, что на 40 дБ выше минимального уровня шума. Рисунок 2 (B) представляет собой график спектрограммы стандарта DJI Phantom 3 на частоте 94 ГГц, полученный с использованием окна STFT длиной 41,2 миллисекунды. Отрицательная скорость соответствует цели, приближающейся к радару, и наоборот, поэтому DJI Phantom на спектрограмме сначала уходил от радара, а затем менял направление на отметке 1.25 с. Спектрограмма получается только путем выбора интервалов диапазона, занятых дроном. Дрон находился на расстоянии около 120 м от радара.
График доплеровской дальности для дрона и график спектрограммы, показывающий микродоплеровские вспышки и вспышки лопасти ротора. ( A ) Пример дальномерного доплеровского профиля дрона, летящего на дальность ~ 110 м, с доплеровскими особенностями. Большая цель с нулевым доплеровским эффектом на высоте ~ 170 м является трехгранной; ( B ) Спектрограмма летающего (диапазон 99–114 м) DJI Phantom 3 Standard на частоте 94 ГГц, где наблюдаются микродоплеровские сигналы относительно объемного допплера; ( C ) Спектрограмма DJI Phantom 3 Standard на расстоянии ~ 45 м на частоте 94 ГГц с более коротким периодом чирпа (20 мкс), обнаруживающим вспышки лезвия.
Большая цель с нулевым доплеровским эффектом на высоте ~ 170 м является трехгранной; ( B ) Спектрограмма летающего (диапазон 99–114 м) DJI Phantom 3 Standard на частоте 94 ГГц, где наблюдаются микродоплеровские сигналы относительно объемного допплера; ( C ) Спектрограмма DJI Phantom 3 Standard на расстоянии ~ 45 м на частоте 94 ГГц с более коротким периодом чирпа (20 мкс), обнаруживающим вспышки лезвия.
Микродоплеровский разброс снова хорошо виден и примерно на 30 дБ ниже, чем объемный доплеровский. Это ожидается, поскольку микродоплеровские сигналы производятся меньшими пластиковыми лопастями ротора, в то время как объемный доплеровский сигнал возникает из большего основного тела. Когда лопасть ротора обращена к радару, они производят вспышку, которую можно увидеть на спектрограмме, полученной с более высокой частотой доплеровской выборки (для захвата быстрого вращения). Спектрограмма, показанная на рис. 2 (C), получена путем изменения периода ЛЧМ-сигнала радара NIRAD 94 ГГц на 20 мкс. Это увеличивает охват скорости до ± 40 мс -1 . Вертикальные полосы на спектрограмме соответствуют вспышкам лопастей ротора. Поскольку все четыре ротора имеют разные скорости для сохранения ориентации, интервал между последовательными вспышками непостоянен. DJI Phantom в этом случае летел со скоростью 10 мс –1 и очень быстро исчез из выбранного здесь диапазона диапазона, следовательно, мощность сигнала ухудшается примерно через 0,2 секунды.
Это увеличивает охват скорости до ± 40 мс -1 . Вертикальные полосы на спектрограмме соответствуют вспышкам лопастей ротора. Поскольку все четыре ротора имеют разные скорости для сохранения ориентации, интервал между последовательными вспышками непостоянен. DJI Phantom в этом случае летел со скоростью 10 мс –1 и очень быстро исчез из выбранного здесь диапазона диапазона, следовательно, мощность сигнала ухудшается примерно через 0,2 секунды.
Графики спектрограммы DJI Inspire 1 можно увидеть на рис.3. Дрон летел на расстоянии около 85 м от радара. Рисунок 3 (A) получен обработкой данных радара 94 ГГц с длиной окна STFT 41,2 миллисекунды (512 отсчетов). Такое же количество выборок было использовано при обработке данных радара на частоте 24 ГГц, что в данном случае соответствует длине окна в 120,2 миллисекунды. Увеличенная длина окна увеличивает разрешение по частоте, что позволяет выявлять линии модуляции винта вертолета (HERM) 11 на графике спектрограммы. Это примерно горизонтальные линии, примерно параллельные объемной доплеровской трассе на рис.3 (В). Phantom и Inspire были запущены одновременно для анализа микродоплеровских характеристик при наличии нескольких целей. На рис. 3 (C) дроны летят в противоположных направлениях: Inspire (внизу) летит к радару, а Phantom (вверху) удаляется. Уровень объемного доплеровского сигнала примерно на 10–15 дБ сильнее для Inspire, что ожидается, поскольку он больше по размеру, хотя следует отметить, что мощность сигнала будет довольно сильно варьироваться в зависимости от диапазона, ориентации и того, насколько хорошо в пределах радиолокационный луч дронов.Микродоплеровский возврат в этом случае также сильнее у Inspire. На рис. 3 (D) обработанная спектрограмма представляет собой данные на частоте 24 ГГц. Здесь беспилотники находились на расстоянии около 85 м от радара и летели на несколько разной высоте. Опять же, возврат сигнала от Inspire (внизу) сильнее, и также наблюдается значительный вклад микродопплера.
Это примерно горизонтальные линии, примерно параллельные объемной доплеровской трассе на рис.3 (В). Phantom и Inspire были запущены одновременно для анализа микродоплеровских характеристик при наличии нескольких целей. На рис. 3 (C) дроны летят в противоположных направлениях: Inspire (внизу) летит к радару, а Phantom (вверху) удаляется. Уровень объемного доплеровского сигнала примерно на 10–15 дБ сильнее для Inspire, что ожидается, поскольку он больше по размеру, хотя следует отметить, что мощность сигнала будет довольно сильно варьироваться в зависимости от диапазона, ориентации и того, насколько хорошо в пределах радиолокационный луч дронов.Микродоплеровский возврат в этом случае также сильнее у Inspire. На рис. 3 (D) обработанная спектрограмма представляет собой данные на частоте 24 ГГц. Здесь беспилотники находились на расстоянии около 85 м от радара и летели на несколько разной высоте. Опять же, возврат сигнала от Inspire (внизу) сильнее, и также наблюдается значительный вклад микродопплера.
Графики спектрограмм DJI Phantom 3 Standard и DJI Inspire 1, демонстрирующие микродоплеровские функции как в K-диапазоне, так и в W-диапазоне.( A ) Спектрограмма летящего DJI Inspire 1 на дальности ~ 85 м на частоте 94 ГГц; ( B ) Спектрограмма летящего DJI Inspire 1 на ~ 85 м на частоте 24 ГГц; ( C ) Спектрограмма DJI Phantom 3 Standard (диапазон ~ 75 м) и DJI Inspire 1 (диапазон ~ 85 м), летящих вместе на частоте 94 ГГц; ( D ) Спектрограмма DJI Phantom 3 Standard (диапазон ~ 75 м) и DJI Inspire 1 (диапазон ~ 85 м), летящих вместе на частоте 24 ГГц.
Рисунок 4 (A, B) иллюстрирует, что микродоплеровский возврат от DJI S900 Hexacopter является самым сильным из всех протестированных дронов, что понятно, поскольку лопасти гексакоптера самые большие и у него наибольшее количество лопастей ротора.Для спектрограммы STFT было использовано 2048 отсчетов, что соответствует 164,8 миллисекундам для 94 ГГц и 480,9 миллисекундам для 24 ГГц. В обоих случаях микродоплеровский разброс занимает всю доплеровскую ось скорости. Линии HERM более заметны на графике 24 ГГц, что в основном связано с большей длиной окна во время обработки. Межстрочные расстояния HERM непостоянны, так как вклады шести гребных винтов, вращающихся с разными скоростями, не складываются детерминированным образом.
В обоих случаях микродоплеровский разброс занимает всю доплеровскую ось скорости. Линии HERM более заметны на графике 24 ГГц, что в основном связано с большей длиной окна во время обработки. Межстрочные расстояния HERM непостоянны, так как вклады шести гребных винтов, вращающихся с разными скоростями, не складываются детерминированным образом.
Графики спектрограммы гексакоптера DJI S900, демонстрирующие микродоплеровские функции как в K-диапазоне, так и в W-диапазоне.( A ) Спектрограмма летающего гексакоптера DJI S900 на дальности ~ 95 м на частоте 94 ГГц; ( B ) Спектрограмма летающего гексакоптера DJI S900 на дальности ~ 95 м на частоте 24 ГГц.
Все радиолокационные измерения ограничены шумом приемника. Минимальные уровни шума появляются в БПФ со средними значениями -77,5 дБм для радара 24 ГГц, -73,4 дБм для T-220 и -62,2 дБм для NIRAD, хотя последнее варьируется в зависимости от профиля диапазона. Все микродоплеровские графики с минимальными значениями цветовой шкалы, которые превышают эти минимальные уровни шума. Как видно из микродоплеровских графиков дрона, абсолютная мощность, отраженная от основного корпуса, находится в диапазоне от 0 дБмВт до -20 дБмВт для диапазонов приблизительно 70–120 м. Сила отраженного сигнала от лопастей гребного винта примерно на 20-40 дБ ниже, чем у основного корпуса. Следует отметить, что изменение сильно зависит от угла наклона лопастей относительно радара. Это подтверждает, что радиолокационные системы были достаточно чувствительны, чтобы улавливать вклад лопастей на этих диапазонах с отношением сигнал / шум не менее 10 дБ.
Как видно из микродоплеровских графиков дрона, абсолютная мощность, отраженная от основного корпуса, находится в диапазоне от 0 дБмВт до -20 дБмВт для диапазонов приблизительно 70–120 м. Сила отраженного сигнала от лопастей гребного винта примерно на 20-40 дБ ниже, чем у основного корпуса. Следует отметить, что изменение сильно зависит от угла наклона лопастей относительно радара. Это подтверждает, что радиолокационные системы были достаточно чувствительны, чтобы улавливать вклад лопастей на этих диапазонах с отношением сигнал / шум не менее 10 дБ.
Микродоплер для птиц
Сбор данных о птицах для микродоплеровского анализа был сложнее, чем сбор данных с дронов, потому что траекторию полета птиц нельзя полностью контролировать. Дрессированную птицу можно заставить перелетать с одного насеста на другое в поисках приманки, но каждый раз она может выбирать немного другой маршрут, в зависимости от условий ветра или настроения. Кроме того, использованные птицы не всегда машут крыльями. Обычно они взмахивали крыльями во время взлета и посадки и скользили посередине, чтобы сберечь энергию.Кроме того, поскольку они летают довольно близко к земле, радар принимает помехи от земли вместе с сигналом от цели, особенно в случае радара с частотой 24 ГГц, который имеет более широкую ширину луча по углу места. Тем не менее, это был очень успешный эксперимент, предоставивший множество микродоплеровских данных. Опять же, оперативные обновления профилей доплеровского диапазона были использованы, чтобы гарантировать, что сохраненные данные содержат информацию микродоплера.
Обычно они взмахивали крыльями во время взлета и посадки и скользили посередине, чтобы сберечь энергию.Кроме того, поскольку они летают довольно близко к земле, радар принимает помехи от земли вместе с сигналом от цели, особенно в случае радара с частотой 24 ГГц, который имеет более широкую ширину луча по углу места. Тем не менее, это был очень успешный эксперимент, предоставивший множество микродоплеровских данных. Опять же, оперативные обновления профилей доплеровского диапазона были использованы, чтобы гарантировать, что сохраненные данные содержат информацию микродоплера.
На рисунке 5 (A, B) показаны спектрограммы северной ястребиной совы. Во время полета он двигался по боковой траектории, чтобы приблизиться к насесту, поэтому изначально находился вне зоны действия луча радара.Радар был направлен на точку назначения, поэтому при приземлении птица попала в луч. Во время замедления он начал взмахивать крыльями, что фиксируется обоими радарами. Частота взмахов крыльев здесь составляет примерно 6 Гц. Скорость взмаха крыла колеблется в пределах 5–10 мс –1 (путем измерения микродоплеровского разброса от объемного допплера). Для STFT используется 512 отсчетов для каждого окна. Поскольку взмахи крыльев очень хорошо фиксируются радарами обоих частотных диапазонов, нет необходимости в увеличении длины окна.Сильный нулевой доплеровский сигнал связан с насестом и шестом, на котором он был установлен.
Скорость взмаха крыла колеблется в пределах 5–10 мс –1 (путем измерения микродоплеровского разброса от объемного допплера). Для STFT используется 512 отсчетов для каждого окна. Поскольку взмахи крыльев очень хорошо фиксируются радарами обоих частотных диапазонов, нет необходимости в увеличении длины окна.Сильный нулевой доплеровский сигнал связан с насестом и шестом, на котором он был установлен.
Графики спектрограммы северной ястребиной совы, показывающие микродоплеровские особенности как в K-диапазоне, так и в W-диапазоне. ( A ) Спектрограмма северной ястребиной совы, приближающейся к насесту на расстоянии 30 м от радара на частоте 94 ГГц, демонстрирующая взмахи крыльев; ( B ) Спектрограмма северной ястребиной совы, приближающейся к насесту на расстоянии 30 м от радара на частоте 24 ГГц.
На рис. 6 (A, B) более подробно показана траектория полета Harris Hawk, которая во время полета имела более прямую траекторию.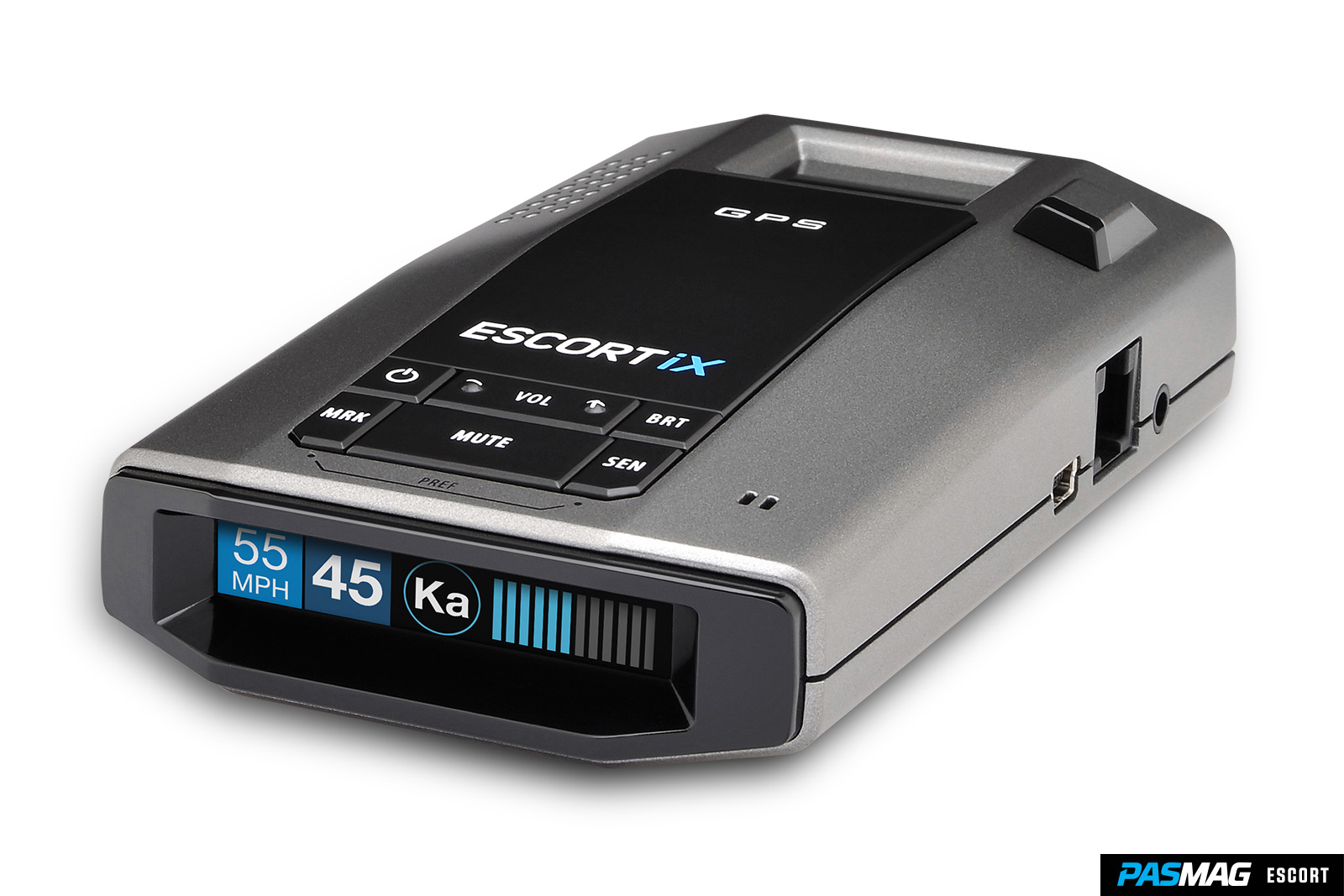 Биение крыльев в начале полета фиксируется радаром 94 ГГц, как показано на рис. 6 (A). Когда птица парила, взмахов крыльев посередине не видно. Во время последнего подхода к окуну ястреб снова начинает хлопать, и наблюдаемая частота взмахов крыльев составляет около 4 Гц. Скорость взмаха крыльев составляет около 2–6 мс –1 . Крыловые биения также видны в данных с частотой 24 ГГц, но не так сильно, как с частотой 94 ГГц, что очевидно на рис. 6 (B), где уровень сигнала обычно ниже. По совпадению, примерно через 5 секунд, чайка пролетела в пределах луча радара в течение очень короткого времени, затем довольно быстро ускользнула, не хлопая крыльями, и была захвачена обоими радарами.Графики доплеровской спектрограммы индийского филина в обоих частотных диапазонах можно увидеть на рис. 7 (A, B). Один насест находился в 30 м от радара, а другой — в 100 м. Данные были получены, когда птица летела в сторону радара. На рис. 7 (A) можно заметить, что птица летела достаточно быстро, чтобы получить псевдоним при измерении.
Биение крыльев в начале полета фиксируется радаром 94 ГГц, как показано на рис. 6 (A). Когда птица парила, взмахов крыльев посередине не видно. Во время последнего подхода к окуну ястреб снова начинает хлопать, и наблюдаемая частота взмахов крыльев составляет около 4 Гц. Скорость взмаха крыльев составляет около 2–6 мс –1 . Крыловые биения также видны в данных с частотой 24 ГГц, но не так сильно, как с частотой 94 ГГц, что очевидно на рис. 6 (B), где уровень сигнала обычно ниже. По совпадению, примерно через 5 секунд, чайка пролетела в пределах луча радара в течение очень короткого времени, затем довольно быстро ускользнула, не хлопая крыльями, и была захвачена обоими радарами.Графики доплеровской спектрограммы индийского филина в обоих частотных диапазонах можно увидеть на рис. 7 (A, B). Один насест находился в 30 м от радара, а другой — в 100 м. Данные были получены, когда птица летела в сторону радара. На рис. 7 (A) можно заметить, что птица летела достаточно быстро, чтобы получить псевдоним при измерении. Он имеет отрицательную скорость, поскольку он приближается, тогда скорость превышает максимальный предел, установленный для радара 94 ГГц (9,93 мс -1 ), после чего сигнал появляется на другой стороне спектрограммы.Также наблюдаются биения крыльев с частотой около 5 Гц. Скорость взмаха крыла в этом случае находится в диапазоне 2–6 мс –1 . Как было замечено ранее с другими птицами, эта птица снова начинает хлопать крыльями, когда приближается к окуну. Поскольку диапазон скоростей немного выше в радаре с частотой 24 ГГц (13,3 мс -1 ), на рис. 7 (B) наложения доплеровского сигнала не наблюдается. Максимальная скорость, которую развивает индийский филин в полете, составляет немногим менее 13 мс −1 . Взмахи крыльев в этом случае не наблюдаются вначале, но отчетливо видны при достижении окуня.На этот раз в поле зрения радара на 24 ГГц попала чайка, что видно на спектрограмме.
Он имеет отрицательную скорость, поскольку он приближается, тогда скорость превышает максимальный предел, установленный для радара 94 ГГц (9,93 мс -1 ), после чего сигнал появляется на другой стороне спектрограммы.Также наблюдаются биения крыльев с частотой около 5 Гц. Скорость взмаха крыла в этом случае находится в диапазоне 2–6 мс –1 . Как было замечено ранее с другими птицами, эта птица снова начинает хлопать крыльями, когда приближается к окуну. Поскольку диапазон скоростей немного выше в радаре с частотой 24 ГГц (13,3 мс -1 ), на рис. 7 (B) наложения доплеровского сигнала не наблюдается. Максимальная скорость, которую развивает индийский филин в полете, составляет немногим менее 13 мс −1 . Взмахи крыльев в этом случае не наблюдаются вначале, но отчетливо видны при достижении окуня.На этот раз в поле зрения радара на 24 ГГц попала чайка, что видно на спектрограмме.
Графики спектрограммы Harris Hawk, показывающие микродоплеровские особенности как в K-диапазоне, так и в W-диапазоне. ( A ) Спектрограмма Харриса Хока, летящего к насесту на расстоянии 85 м от радара на частоте 94 ГГц, чайка попадает в поле зрения во время полета; ( B ) Спектрограмма Harris Hawk в направлении насеста на расстоянии 85 м от радара на частоте 24 ГГц.
( A ) Спектрограмма Харриса Хока, летящего к насесту на расстоянии 85 м от радара на частоте 94 ГГц, чайка попадает в поле зрения во время полета; ( B ) Спектрограмма Harris Hawk в направлении насеста на расстоянии 85 м от радара на частоте 24 ГГц.
Графики спектрограммы Indian Eagle Owl, показывающие микродоплеровские особенности как в K-диапазоне, так и в W-диапазоне.( A ) Спектрограмма индийского филина, летящего к насесту на расстоянии 30 м от радара на частоте 94 ГГц, наблюдается наложение доплеровского сигнала; ( B ) Спектрограмма индийской орлиной совы, летящей к насесту на расстоянии 30 м от радара на частоте 24 ГГц, чайка появляется в поле зрения во время полета.
На рисунке 8 (A, B) показано, что взмахи крыльев Tawny Eagle отчетливо наблюдаются по данным 94 ГГц и 24 ГГц. В этом случае частота взмахов крыльев составляет примерно 4 Гц. В этом случае наблюдается большая скорость взмахов крыльев, достигающая 11–12 мс –1 . Эта птица была самой темпераментной из всех четырех, поэтому было очень трудно удержать птицу в пределах луча радара в течение всего полета. Когда он в конце концов приблизился к окуну, оба радара получили сильные микродоплеровские сигналы.
Эта птица была самой темпераментной из всех четырех, поэтому было очень трудно удержать птицу в пределах луча радара в течение всего полета. Когда он в конце концов приблизился к окуну, оба радара получили сильные микродоплеровские сигналы.
Графики спектрограммы Tawny Eagle, демонстрирующие микродоплеровские особенности как в K-диапазоне, так и в W-диапазоне. ( A ) Спектрограмма рыжеватого орла, приближающегося к насесту на расстоянии 30 м от радара на частоте 94 ГГц; ( B ) Спектрограмма рыжего орла, приближающегося к насесту на расстоянии 30 м от радара на частоте 24 ГГц.В обоих случаях наблюдается сильный микродоплер из-за взмахов крыльев.
Из всех микродоплеровских спектрограмм птиц видно, что разница в силе сигнала от основного корпуса и крыльев не так велика, как разница между сигналами от фюзеляжа и пропеллеров для дронов. Это ожидается с учетом соотношения размеров. Отражаемый сигнал от крыльев варьируется от примерно сопоставимого с силой сигнала основного тела (рис.